The Sterling charger we’ve had on board nb Tanya Louise since Feb 2014 has bitten the dust, with 31220 hours on it’s internal clock. Since we’re a liveaboard boat, this charger has had a lot of use while we’re on the mooring during winter, when the solar bank isn’t outputting it’s full rate. First, a bit of a teardown to explore the unit, then onto the repair:
Active PFC Section
There’s the usual mains input filtering on the left, with the bridge rectifier on it’s heatsink.
Underneath the centre massive heatsinks is the main transformer (not visible here) & active PFC circuit. The device peeking out from underneath is the huge inductor needed for PFC. It’s associated switching MOSFET is to the right.
Logic PSU Section
On the other side of the PFC section is the main DC rail filter electrolytic, a 450v 150µF part. Here some evidence of long-term heating can be seen in the adhesive around the base, it’s nearly completely turned black! It’s not a decent brand either, a Chinese CapXon.
The PCB fuse just behind it is in the DC feed to the main switching supply, so the input fuse only protects the filter & Active PFC circuitry. Luckily this fuse didn’t blow during the failure, telling me the fault was earlier in the power chain.
The logic circuits are powered by an independent switching supply in the centre, providing a +5v rail to the microcontroller. The fan header & control components are not populated in this 10A model, but I may end up retrofitting a fan anyway as this unit has always run a little too warm. The entire board is heavily conformal coated on both sides, to help with water resistance associated with being in a marine environment. This has worked well, as there isn’t a single trace of moisture anywhere, only dust from years of use.
There is some thermal protection for the main SMPS switching MOSFETS with the Klixon thermal fuse clipped to the heatsink.
DC Output Section
The DC output rectifiers are on the large heatsink in the centre, with a small bodge board fitted. Due to the heavy conformal coating on the board I can’t get the ID from this small 8-pin IC, but from the fact that the output rectifiers are in fact IRF1010E MOSFETS, rated at 84A a piece, this is an synchronous rectifier controller.
Oddly, the output filter electrolytics are a mix of Nichicon (nice), and CapXon (shite). A bit of penny pinching here, which if a little naff since these chargers are anything but cheap. (£244.80 at the time of writing).
Hiding just behind the electrolytics is a large choke, and a reverse-polarity protection diode, which is wired crowbar-style. Reversing the polarity here will blow the 15A DC bus fuse instantly, and may destroy this diode if it doesn’t blow quick enough.
DC Outputs
Right on the output end are a pair of large Ixys DSSK38 TO220 Dual 20A dual Schottky diodes, isolating the two outputs from each other, a nice margin on these for a 10A charger, since the diodes are paralleled each channel is capable of 40A. This prevents one bank discharging into another & allows the charger logic to monitor the voltages individually. The only issue here is the 400mV drop of these diodes introduce a little bit of inefficiency. To increase current capacity of the PCB, the aluminium heatsink is being used as the main positive busbar. From the sizing of the power components here, I would think that the same PCB & component load is used for all the chargers up to 40A, since both the PFC inductor & main power transformer are massive for a 10A output. There are unpopulated output components on this low-end model, to reduce the cost since they aren’t needed.
Front Panel Control Connections
A trio of headers connect all the control & sense signals to the front panel PCB, which contains all the control logic. This unit is sensing all output voltages, output current & PSU rail voltages.
Front Panel LEDs
The front panel is stuffed with LEDs & 7-segment displays to show the current mode, charging voltage & current. There’s 2 tactile switches for adjustments.
Front Panel Reverse
The reverse of the board has the main microcontroller – again identifying this is impossible due to the heavy conformal coat. The LEDs are being driven through a 74HC245D CMOS Octal Bus Transceiver.
Now on to the repair! I’m not particularly impressed with only getting 4 years from this unit, they are very expensive as already mentioned, so I would expect a longer lifespan. The input fuse had blown in this case, leaving me with a totally dead charger. A quick multimeter test on the input stage of the unit showed a dead short – the main AC input bridge rectifier has gone short circuit.
Bridge Rectifier Removed
Here the defective bridge has been desoldered from the board. It’s a KBU1008 10A 800v part. Once this was removed I confirmed there was no longer an input short, on either the AC side or the DC output side to the PFC circuit.
Testing The Rectifier
Time to stick the desoldered bridge on the milliohm meter & see how badly it has failed.
Yep, Definitely Shorted
I’d say 31mΩ would qualify as a short. It’s no wonder the 4A input fuse blew instantly. There is no sign of excessive heat around the rectifier, so I’m not sure why this would have failed, it’s certainly over-rated for the 10A charger.
Testing Without Rectifier
Now the defective diode bridge has been removed from the circuit, it’s time to apply some controlled power to see if anything else has failed. For this I used a module from one of my previous teardowns – the inverter from a portable TV.
Test Inverter
This neat little unit outputs 330v DC at a few dozen watts, plenty enough to power up the charger with a small load for testing purposes. The charger does pull the voltage of this converter down significantly, to about 100v, but it still provides just enough to get things going.
It’s Alive!
After applying some direct DC power to the input, it’s ALIVE! Certainly makes a change from the usual SMPS failures I come across, where a single component causes a chain reaction that writes off everything.
Replacement Rectifier
Unfortunately I couldn’t find the exact same rectifier to replace the shorted one, so I had to go for the KBU1010, which is rated for 1000v instead of 800v, but the Vf rating (Forward Voltage), is the same, so it won’t dissipate any more power.
Soldered In
Here’s the new rectifier soldered into place on the PCB & bolted to it’s heatsink, with some decent thermal compound in between.
Input Board
Here is the factory fuse, a soldered in device. I’ll be replacing this with standard clips for 20x5mm fuses to make replacement in the future easier, the required hole pattern in the PCB is already present. Most of the mains input filtering is also on this little daughterboard.
Fuse Replaced
Now the fuse has been replaced with a standard one, which is much more easily replaceable. This fuse shouldn’t blow however, unless another fault develops.
Full Load Test
Now everything is back together, a full load test charging a 200Ah 12v battery for a few hours will tell me if the fix is good. This charger won’t be going back into service onboard the boat, it’s being replaced anyway with a new 50A charger, to better suit the larger loads we have now. It won’t be a Sterling though, as they are far too expensive. I’ll report back if anything fails!
Here’s another random bit of RF tech, I’m told this is a wireless energy management sensor, however I wasn’t able to find anything similar on the interwebs. It’s powered by a standard 9v PP3 battery.
Microcontroller
System control is handled by this Microchip PIC18F2520 Enhanced Flash microcontroller, this has an onboard 10-bit ADC & nanoWatt technology according to their datasheet. There’s a 4MHz crystal providing the clock, with a small SOT-23 voltage regulator in the bottom corner. There’s a screw terminal header & a plug header, but I’ve no idea what these would be used for. Maybe connecting an external voltage/current sensor & a programming header? The tactile button I imagine is for pairing the unit with it’s controller.
PCB Bottom
The bottom of the PCB is almost entirely taken up by a Radiocrafts RC1240 433MHz RF transceiver. Underneath there’s a large 10kΩ resistor, maybe a current transformer load resistor, and a TCLT1600 optocoupler. Just from the opto it’s clear this unit is intended to interface in some way to the mains grid. The antenna is connected at top right, in a footprint for a SMA connector, but this isn’t fitted.
Being in technology for a long time, I have seen my fair share of disk failures. However I have never seen a single instance where SMART has issued a sufficient warning to backup any data on a failing disk. The following is an example of this in action.
Toshiba MQ01ABD050
Here is a 2.5″ Toshiba MQ01ABD050 500GB disk drive. This unit was made in 2014, but has a very low hour count of ~8 months, with only ~5 months of the heads being loaded onto the platters, since it has been used to store offline files. This disk was working perfectly the last time it was plugged in a few weeks ago, but today within seconds of starting to transfer data, it began slowing down, then stopped entirely. A quick look at the SMART stats showed over 4000 reallocated sectors, so a full scan was initiated.
SMART Test Failure
After the couple of hours an extended test takes, the firmware managed to find a total of 16,376 bad sectors, of which 10K+ were still pending reallocation. Just after the test finished, the disk began making the usual clicking sound of the head actuator losing lock on the servo tracks. Yet SMART was still insisting that the disk was OK! In total about 3 hours between first power up & the disk failing entirely. This is possibly the most sudden failure of a disk I’ve seen so far, but SMART didn’t even twig from the huge number of sector reallocations that something was amiss. I don’t believe the platters are at fault here, it’s most likely to be either a head fault or preamp failure, as I don’t think platters can catastrophically fail this quickly. I expected SMART to at least flag that the drive was in a bad state once it’s self-test completed, but nope.
Internals
After pulling the lid on this disk, to see if there’s any evidence of a head crashing into a platter, there’s nothing – at least on a macroscopic scale, the single platter is pristine. I’ve seen disks crash to the point where the coating has been scrubbed from the platters so thoroughly that they’ve been returned to the glass discs they started off as, with the enclosure packed full of fine black powder that used to be data layer, but there’s no indication of mechanical failure here. Electronic failure is looking very likely.
Clearly, relying on SMART to alert when a disk is about to take a dive is an unwise idea, replacing drives after a set period is much better insurance if they are used for critical applications. Of course, current backups is always a good idea, no matter the age of drive.
Since I do my own PCBs on a somewhat regular basis, I decided it was time to move to a more professional method to etch my boards. I have been using the cheap toner transfer method, using special yellow coated paper from China. (I think it’s coated in wax, or some plastic film).
The toner transfer paper does usually work quite well, but I’ve had many issues with pinholes in the transfer, which cause the etched tracks to look horrid, (not to mention the potential for breaks & reduced current capacity), and the toner not transferring properly at all, to issues with the paper permanently fusing to the copper instead of just transferring the toner.
BigClive has done a couple of fairly comprehensive videos on the dry film photoresist available from AliExpress & eBay. This stuff is used similarly to the toner transfer method, in that the film is fused to the board with heat, but then things diverge. It’s supplied either in cut sheets, or by the roll. I ordered a full roll to avoid the issues I’ve heard of when the stuff is folded in the post – once it’s creased, it’s totally useless. The dry film itself is a gel sandwiched between two protective plastic film sheets, and bonds to the board with the application of heat from a laminator.
The board is first cleaned with scotchbrite pad & soap to remove any tarnish & oil from the copper.
Dry Film
Once the board has been cleaned, one side of the backing film is removed from the gel with adhesive tape, and the dry film is placed on the board while still wet. This stops the film from sticking immediately to the clean copper, one edge is pressed down, and it’s then fed through a modified laminator:
Modified Laminator
I’ve cut away most of the plastic covering the hot rollers, as constant jamming was an issue with this cheapo unit. All the mains power is safely tucked away under some remaining plastic cover at the end. The board with it’s covering of dry film is fed into the laminator – the edge that was pressed down first. This allows the laminator to squeeze out any remaining water & air bubbles from between the two so no creases or blisters form.
After Lamination
Once the board has been run through the laminator about 6 times, (enough to get it very hot to the touch), the film is totally bonded to the copper. The top film is left in place to protect the UV sensitive layer during expsure.
Photomask
The exposure mask is laser printed onto OHP transparencies, in this case I’ve found I need to use two copies overlaid to get enough opacity in the black toner sections to block the UV light. Some touching up with a Sharpie is also easy to do if there are any weak spots in the toner coverage. This film is negative type – All the black areas will be unexposed and washed off in the developer tank. I also found I had to be fairly generous with track spacing, using too small lines just causes issues with the UV curing bits of film it isn’t supposed to.
Exposing The PCB
The PCB is placed on a firm surface, the exposure mask lined up on top, and the whole thing covered with a sheet of standard glass to apply even pressure. The UV exposure lamp in this case is a cheap eBay UV nail curing unit, with 15 high power LEDs. (I’ll do a teardown on this when I get some time, it’s got some very odd LEDs in it). Exposing the board for 60 seconds is all the time needed.
After Exposure
After the board is exposed, the areas that got hit with the UV light have turned purple – the resist has hardened in these areas. It’s bloody tough as well, I’ve scrubbed at it with some vigour and it doesn’t come off. Toner transfer was a bit naff in this respect, most of the time the toner came off so easily that the etchant lifted it off. After this step is done, the remaining protective film on the top can be removed.
After Developing
The film is developed in a solution of Sodium Carbonate (washing Soda). This is mildly alkaline and it dissolves off the unexposed resist.
After Etching
Now it’s into the etching tank for a couple of minutes, I’m still using Ferric Chloride to etch my boards, at about 60°C. Etching at room temperature is much too slow. Once this is done, the board is washed, and then dipped in the strip tank for a couple of minutes. This is a Sodium Hydroxide solution, and is very caustic, so gloves are required for this bit. Getting Ferric Chloride on skin is also a fairly bad idea, it stains everything orange, and it attacks pretty much every metal it comes into contact with, including Stainless Steel.
This method does require some more effort than the toner transfer method, but it’s much more reliable. If something goes wrong with the exposure, it’s very easy to strip the board completely & start again before etching. This saves PCB material and etchant. This is definitely more suited to small-scale production as well, since the photomask can be reused, there’s much less waste at the end. The etched lines are sharper, much better defined & even with some more chemicals involved, it’s a pretty clean process. All apart from the Ferric Chloride can be disposed of down the sink after use, since the developer & stripper are just alkaline solutions.
During the rebuild of the wheelchair motors for the support trolley, I found myself needing an accurate milliohm meter to test the armature windings with. Commercial instruments like these are expensive, but some Google searching found a milliohm meter project based around the Arduino from Circuit Cellar.
Circuit Diagram
Here’s the original author’s circuit diagram, paralleling nearly all of the Arduino’s digital output pins together to source/sink the test current, an ADS1115 ADC to take more accurate readings, with the results displayed on a jellybean 128×64 OLED module. The most expensive part here is the 10Ω 0.1% 15ppm reference resistor, R9.
I decided to make some small adjustments to the power supply section of the project, to include a rechargeable lithium cell rather than a 9v PP3 battery. This required some small changes to the Arduino sketch, a DC-DC boost converter to supply 5v from the 3.7v of a lithium cell, a charger module for said cell, and with the battery voltage being within the input range of the analogue inputs, the voltage divider on A3 was removed. A new display icon was also added in to indicate when the battery is being charged, this uses another digital input pin for input voltage sensing.
I also made some basic changes to the way an unreadable resistance is displayed, showing “OL” instead of “—–“, and the meter sends the reading out over the I²C bus, for future expansion purposes. The address the data is directed to is set to 0x50.
I’ve not etched a PCB for this as I couldn’t be bothered with the messy etchant, so I built this on a matrix board instead.
Final Prototype
Since I made some changes to both the software and the hardware components, I decided to prototype the changes on breadboard. The lithium cell is at the top of the image. with the charger module & DC-DC converter. The Arduino Nano is on the right, the ADC & reference resistor on the left, and the display at the bottom.
The Raspberry Pi & ESP8266 module are being used in this case to discharge the battery quicker to make sure the battery level calibration was correct, and to make sure the DC-DC converter would continue to function throughout the battery voltage range.
Matrix Board Passives
Here’s the final board with the passive components installed, along with the DC-DC converter. I used a Texas Instruments PTN04050 boost module for power as I had one spare.
Matrix Board Rear
The bottom of the board has most of the wire jumpers for the I²C bus, and power sensing.
Matrix Board Modules
Here’s both modules installed on the board. I used an Arduino Nano instead of the Arduino Pro Mini that the original used as these were the parts I had in stock. Routing the analogue pins is also easier on the Mini, as they’re brought out to pins in the DIP footprint, instead of requiring wire links to odd spots on the module. To secure the PCB into the case without having to drill any holes, I tapped the corner holes of the matrix board M2.5 & threaded cap head screws in. These are then spot glued to the bottom of the case to secure the finished board.
Lithium Charger
The lithium charger module is attached to the side of the enclosure, the third white wire is for input sensing – when the USB cable is plugged in a charge icon is shown on the OLED display.
Input Connections
The inputs on the side of the enclosure. I’ve used the same 6-pin round connector for the probes, power is applied to the Arduino when the probes are plugged in.
Module Installed
Everything installed in the enclosure – it’s a pretty tight fit especially with the lithium cell in place.
Meter Top Cover
The top cover has the Measure button, and the OLED display panel, the latter secured to the case with M2.5 cap head screws.
Kelvin Clips
Finally, the measurement loom, with Kelvin clips. These were an eBay buy, keeping things cheap. These clips seem to be fairly well built, even if the hinges are plastic. I doubt they’re actually gold-plated, more likely to be brass. I haven’t noticed any error introduced by these cheap clips so far.
The modified sketch is below:
// ---------------------------------------------------------------------------------------------
// Simple, accurate milliohmeter
//
// (c) Mark Driedger 2015
//
// - Determines resistance using 4 wire measurement of voltage across a series connected
// reference resistor (Rr, 10 ohm, 0.1%) and test resistor (Rx)
// - range of accurate measurement is roughly 50 mohm to 10Kohm
// - Uses Arduino digital I/O ports to deliver the test current, alternating polarity to cancel
// offset errors (synchronous detector)
// - 4 I/O pins are used for each leg of the test current to increase test current
// - Averages 2 cycles and 100 samples/cycle
// - Uses a 16 bit ADC ADS1115 with 16x PGA to improve accuracy
//
// Version History
// May 24/15 v1.0-v4.0
// - initial development versions
// May 27/15 v5.0
// - changed display to I2C
// - backed out low power module since it seemed to cause serial port upload problems
// ---------------------------------------------------------------------------------------------
#include <Wire.h>
#include <SPI.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
//#include <LowPower.h>
#if (SSD1306_LCDHEIGHT != 64)
#error("Height incorrect, please fix Adafruit_SSD1306.h!");
#endif
// ---------------------------------------------------------------------------------------------
// I/O port usage
// ---------------------------------------------------------------------------------------------
// serial port (debug and s/w download) 0, 1
// I²C interface to ADC & display A4, A5
// positive drive 2, 3, 4, 5
// push to test input 8
// unused 9, 10, 11, A0, A1, A2, A6, A7
// negative drive 6, 7, 8, 9
// battery voltage monitor A3
// debug output 13
#define P_PushToTest 10 // push button (measure), active low
#define P_Debug 13
#define CHG 12
// ADS1115 mux and gain settings
#define ADS1115_CH01 0x00 // p = AIN0, n = AIN1
#define ADS1115_CH03 0x01 // ... etc
#define ADS1115_CH13 0x02
#define ADS1115_CH23 0x03
#define ADS1115_CH0G 0x04 // p = AIN0, n = GND
#define ADS1115_CH1G 0x05 // ... etc
#define ADS1115_CH2G 0x06
#define ADS1115_CH3G 0x07
#define ADS1115_6p144 0x00 // +/- 6.144 V full scale
#define ADS1115_4p096 0x01 // +/- 4.096 V full scale
#define ADS1115_2p048 0x02 // +/- 2.048 V full scale
#define ADS1115_1p024 0x03 // +/- 1.024 V full scale
#define ADS1115_0p512 0x04 // +/- 0.512 V full scale
#define ADS1115_0p256 0x05 // +/- 0.256 V full scale
#define ADS1115_0p256B 0x06 // same as ADS1115_0p256
#define ADS1115_0p256C 0x07 // same as ADS1115_0p256
Adafruit_SSD1306 display(0); // using I2C interface, no reset pin
static int debug_mode = 0; // true in debug mode
float ADS1115read(byte channel, byte gain)
//--------------------------------------------------------------------------------------
// reads a single sample from the ADS1115 ADC at a given mux (channel) and gain setting
// - channel is 3 bit channel number/mux setting (one of ADS1115_CHxx)
// - gain is 3 bit PGA gain setting (one of ADS1115_xpxxx)
// - returns voltage in volts
// - uses single shot mode, polling for conversion complete, default I2C address
// - conversion takes approximatly 9.25 msec
//--------------------------------------------------------------------------------------
{
const int address = 0x48; // ADS1115 I2C address, A0=0, A1=0
byte hiByte, loByte;
int r;
float x;
channel &= 0x07; // constrain to 3 bits
gain &= 0x07;
hiByte = B10000001 | (channel<<4) | (gain<<1); // conversion start command
loByte = B10000011;
Wire.beginTransmission(address); // send conversion start command
Wire.write(0x01); // address the config register
Wire.write(hiByte); // ...and send config register value
Wire.write(loByte);
Wire.endTransmission();
do // loop until conversion complete
{
Wire.requestFrom(address, 2); // config register is still addressed
while(Wire.available())
{
hiByte = Wire.read(); // ... and read config register
loByte = Wire.read();
}
}
while ((hiByte & 0x80)==0); // upper bit (OS) is conversion complete
Wire.beginTransmission(address);
Wire.write(0x00); // address the conversion register
Wire.endTransmission();
Wire.requestFrom(address, 2); // ... and get 2 byte result
while(Wire.available())
{
hiByte = Wire.read();
loByte = Wire.read();
}
r = loByte | hiByte<<8; // convert to 16 bit int
switch(gain) // ... and now convert to volts
{
case ADS1115_6p144: x = r * 6.144 / 32768.0; break;
case ADS1115_4p096: x = r * 4.096 / 32768.0; break;
case ADS1115_2p048: x = r * 2.048 / 32768.0; break;
case ADS1115_1p024: x = r * 1.024 / 32768.0; break;
case ADS1115_0p512: x = r * 0.512 / 32768.0; break;
case ADS1115_0p256:
case ADS1115_0p256B:
case ADS1115_0p256C: x = r * 0.256 / 32768.0; break;
}
return x;
}
// ---------------------------------------------------------------------------------------------
// Drive functions
// - ports 4-7 and A0-A3 are used to differentially drive resistor under test
// - the ports are resistively summed to increase current capability
// - DriveOff() disables the drive, setting the bits to input
// - DriveOn() enables the drive, setting the bits to output
// - DriveP() enables drive with positive current flow (from ports 4-7 to ports A0-A3)
// - DriveN() enables drive with negative current flow
// ---------------------------------------------------------------------------------------------
void DriveP()
{
DriveOff();
digitalWrite( 2, HIGH);
digitalWrite( 3, HIGH);
digitalWrite( 4, HIGH);
digitalWrite( 5, HIGH);
digitalWrite( 6, LOW);
digitalWrite( 7, LOW);
digitalWrite( 8, LOW);
digitalWrite( 9, LOW);
DriveOn();
}
void DriveN()
{
DriveOff();
digitalWrite( 2, LOW);
digitalWrite( 3, LOW);
digitalWrite( 4, LOW);
digitalWrite( 5, LOW);
digitalWrite( 6, HIGH);
digitalWrite( 7, HIGH);
digitalWrite( 8, HIGH);
digitalWrite( 9, HIGH);
DriveOn();
}
void DriveOn()
{
pinMode( 2, OUTPUT); // enable source/sink in pairs
pinMode( 6, OUTPUT);
pinMode( 3, OUTPUT);
pinMode( 7, OUTPUT);
pinMode( 4, OUTPUT);
pinMode( 8, OUTPUT);
pinMode( 5, OUTPUT);
pinMode( 9, OUTPUT);
delayMicroseconds(5000); // 5ms delay
}
void DriveOff()
{
pinMode( 2, INPUT); // disable source/sink in pairs
pinMode( 6, INPUT);
pinMode( 3, INPUT);
pinMode( 7, INPUT);
pinMode( 4, INPUT);
pinMode( 8, INPUT);
pinMode( 5, INPUT);
pinMode( 9, INPUT);
}
int CalcPGA(float x)
// ---------------------------------------------------------------------------------------------
// Calculate optimum PGA setting based on a sample voltage, x, read at lowest PGA gain
// - returns the highest PGA gain that allows x to be read with 10% headroom
// ---------------------------------------------------------------------------------------------
{
x = abs(x);
if (x>3.680) return ADS1115_6p144;
if (x>1.840) return ADS1115_4p096;
if (x>0.920) return ADS1115_2p048;
if (x>0.460) return ADS1115_1p024;
if (x>0.230) return ADS1115_0p512;
else return ADS1115_0p256;
}
void BatteryIcon(float charge)
// ---------------------------------------------------------------------------------------------
// Draw a battery charge icon into the display buffer without refreshing the display
// - charge ranges from 0.0 (empty) to 1.0 (full)
// ---------------------------------------------------------------------------------------------
{
static const unsigned char PROGMEM chg[] = // Battery Charge Icon
{ 0x1c, 0x18, 0x38, 0x3c, 0x18, 0x10, 0x20, 0x00 };
int w = constrain(charge, 0.0, 1.0)*16; // 0 to 16 pixels wide depending on charge
display.drawRect(100, 0, 16, 7, WHITE); // outline
display.drawRect(116, 2, 3, 3, WHITE); // nib
display.fillRect(100, 0, w, 7, WHITE); // charge indication
//battery charging indication
pinMode(CHG, INPUT);
if (digitalRead(CHG) == HIGH)
display.drawBitmap(91, 0, chg, 8, 8, WHITE);
}
void f2str(float x, int N, char *c)
// ---------------------------------------------------------------------------------------------
// Converts a floating point number x to a string c with N digits of precision
// - *c must be a string array of length at least N+3 (N + '-', '.', '\0')
// - x must be have than N leading digits (before decimal) or "#\0" is returned
// ---------------------------------------------------------------------------------------------
{
int j, k, r;
float y;
if (x<0.0) // handle negative numbers
{
*c++ = '-';
x = -x;
}
for (j=0; x>=1.0; j++) // j digits before decimal point
x /= 10.0; // .. and scale x to be < 1.0
if (j>N) // return error string if too many digits
{
*c++ = '#';
*c++ = '\0';
return;
}
y = pow(10, (float) N); // round to N digits
x = round(x * y) / y;
if (x>1.0) // if 1st digit rounded up ...
{
x /= 10.0; // then normalize back down 1 digit
j++;
}
for (k=0; k<N; k++)
{
r = (int) (x*10.0); // leading digit as int
x = x*10-r; // remove leading digit and shift 1 digit
*c++ = r + '0'; // add leading digit to string
if (k==j-1 && k!=N-1) // add decimal point after j digits
*c++ = '.'; // ... unless there are N digits before decimal
}
*c++ = '\0';
}
void DisplayResistance(float x)
// ---------------------------------------------------------------------------------------------
// Adds the resistance value, x, to the display buffer without refreshing the display
// - converts to kohm, milliohm or microohm if necessary
// ---------------------------------------------------------------------------------------------
{
static const unsigned char PROGMEM omega_bmp[] = // omega (ohm) symbol
{ B00000011, B11000000,
B00001100, B00110000,
B00110000, B00001100,
B01000000, B00000010,
B01000000, B00000010,
B10000000, B00000001,
B10000000, B00000001,
B10000000, B00000001,
B10000000, B00000001,
B10000000, B00000001,
B01000000, B00000010,
B01000000, B00000010,
B01000000, B00000010,
B00100000, B00000100,
B00010000, B00001000,
B11111000, B00011111 };
char s[8];
char prefix;
if (x>=1000.0) // display in killo ohms
{
x /= 1000.0;
prefix = 'k';
}
else if (x<0.001) // display in micro ohms
{
x *= 1000000.0;
prefix = 0xe5; // mu
}
else if (x<1.0) // display in milli ohms
{
x *= 1000.0;
prefix = 'm';
}
else
prefix = ' '; // display in ohms
f2str(x, 5, s);
// display computed resistance
display.setTextSize(2);
display.setTextColor(WHITE);
display.setCursor(0,20);
display.print(s);
// display prefix
display.setCursor(85,20);
display.print(prefix);
// display omega (ohms) symbol
display.drawBitmap(103, 18, omega_bmp, 16, 16, WHITE);
}
void DisplayDebug(int a, int b, float x, float y, float Vbat)
// ---------------------------------------------------------------------------------------------
// Adds debug info to the display buffer without showing the updated display
// - Adds 2 ints (a, b) and a float(Vbat) to the top line and 2 floats (x, y)
// to the bottom line+, all in small (size 1) text
// ---------------------------------------------------------------------------------------------
{
// display x, y in lower left, small font
display.setTextSize(1);
display.setCursor(0,45);
display.print(x,3);
display.print(" ");
display.print(y,3);
// display a, b in upper left, small font
display.setTextSize(1);
display.setCursor(0,0);
display.print(a);
display.print(" ");
display.print(b);
// display Vbat in upper middle, small font
display.setTextSize(1);
display.setCursor(60,0);
display.print(Vbat,1);
}
void DisplayStr(char *s)
// ---------------------------------------------------------------------------------------------
// Adds a string, s, to the display buffer without refreshing the display @ (0,20)
// ---------------------------------------------------------------------------------------------
{
display.setTextSize(2);
display.setTextColor(WHITE);
display.setCursor(8,20);
display.print(s);
}
#ifdef TESTMODE
void loop()
{
while (digitalRead(P_PushToTest))
;
DriveP();
display.clearDisplay();
DisplayStr("Drive: +");
display.display();
delay(250);
while (digitalRead(P_PushToTest))
;
DriveN();
display.clearDisplay();
DisplayStr("Drive: -");
display.display();
delay(250);
while (digitalRead(P_PushToTest))
;
DriveOff();
display.clearDisplay();
DisplayStr("Drive: Off");
display.display();
delay(250);
}
#endif
void setup()
// ---------------------------------------------------------------------------------------------
// - initializae display and I/O ports
// ---------------------------------------------------------------------------------------------
{
DriveOff(); // disable current drive
Wire.begin(); // join I2C bus
display.begin(SSD1306_SWITCHCAPVCC, 0x3c, 0); // initialize display @ address 0x3c, no reset
pinMode(P_PushToTest, INPUT_PULLUP); // measure push button switch, active low
debug_mode = !digitalRead(P_PushToTest); // if pushed during power on, then debug mode
pinMode(P_Debug, OUTPUT); // debug port
}
void loop()
// ---------------------------------------------------------------------------------------------
// main measurement loop
// ---------------------------------------------------------------------------------------------
{
const float Rr = 10.0; // reference resistor value, ohms
const float Rcal = 1.002419; // calibration factor
const int N = 2; // number of cycles to average
const int M = 50; // samples per half cycle
static long Toff;
double Rx; // calculated resistor under test, ohms
byte PGAr, PGAx; // PGA gains (r = reference, x = test resistors)
float Vr, Vx, Wx, Wr; // voltages in V
float Rn; // calculated resistor under test, ohms, single sample
double Avgr, Avgx; // average ADC readings in mV
int j, k, n;
float Vbat; // battery voltage in V (from 2:1 divider)
char serialbuff[10]; // Buffer for sending the reading over I²C
display.clearDisplay();
DisplayStr("measuring");
display.display();
// determine PGA gains
DriveP();
Wr = ADS1115read(ADS1115_CH01, ADS1115_6p144);
Wx = ADS1115read(ADS1115_CH23, ADS1115_6p144);
DriveN();
Vr = -ADS1115read(ADS1115_CH01, ADS1115_6p144);
Vx = -ADS1115read(ADS1115_CH23, ADS1115_6p144);
// measure battery voltage ... while drive is on so there is a load
Vbat = analogRead(A3)*5.0/1024.0; // 2:1 divider (5V FS) on 4.2v lithium battery
DriveOff();
PGAr = CalcPGA(max(Vr, Wr)); // determine optimum PGA gains
PGAx = CalcPGA(max(Vx, Wx));
// measure resistance using synchronous detection
Avgr = Avgx = 0.0; // clear averages
Rx = 0.0;
n = 0;
for (j=0; j<N; j++) // for each cycle
{
DriveP(); // turn on drive, positive
for (k=0; k<M; k++)
{
digitalWrite(P_Debug, 1);
Vx = ADS1115read(ADS1115_CH23, PGAx);
digitalWrite(P_Debug, 0);
Vr = ADS1115read(ADS1115_CH01, PGAr);
Avgx += Vx;
Avgr += Vr;
Rn = Vx/Vr;
if (Rn>0.0 && Rn<10000.0)
{
Rx += Rn;
n++;
}
}
DriveN(); // turn on drive, negative
for (k=0; k<M; k++)
{
digitalWrite(P_Debug, 1);
Vx = ADS1115read(ADS1115_CH23, PGAx);
digitalWrite(P_Debug, 0);
Vr = ADS1115read(ADS1115_CH01, PGAr);
Avgx -= Vx;
Avgr -= Vr;
Rn = Vx/Vr;
if (Rn>0.0 && Rn<10000.0)
{
Rx += Rn;
n++;
}
}
}
DriveOff();
Rx *= Rr * Rcal / n; // apply calibration factor and compute average
Avgr *= 1000.0 / (2.0*N*M); // average in mV
Avgx *= 1000.0 / (2.0*N*M);
// display the results ... battery icon, Rx measurement, debug info if requested
display.clearDisplay(); // ... and display result
BatteryIcon((Vbat-3.0)/(4.2-3.0)); // 7.5V = 0%, 9V = 100%
//display.drawLine(0, 8, 127, 8, WHITE); //Draw separator line under icons
if (n==0){ // no measurement taken ...
display.setTextSize(2);
display.setCursor(51,20);
display.print(F("OL"));
}
//DisplayStr("-----");
else
DisplayResistance(Rx);
//Send Reading via I²C
Wire.beginTransmission(0x50);
Wire.write(dtostrf(Rx, 5, 5, serialbuff));
Wire.endTransmission();
if (debug_mode)
DisplayDebug(PGAr, PGAx, Avgr, Avgx, Vbat);
display.display(); // show the display
// and then wait for next measurement request
Toff = millis()+60000L;
while(digitalRead(P_PushToTest)) // loop until measure button pressed
{
// Enter power down state for 120ms with ADC and BOD module disabled
//LowPower.powerDown(SLEEP_120MS, ADC_OFF, BOD_OFF);
if (millis()>Toff) // after 7 seconds ...
{
display.clearDisplay(); // clear display
display.display();
}
}
}
Here’s the biggest portable USB powerbank I’ve seen yet – the PowerAdd Pilot X7, this comes with a 20Ah (20,000mAh) capacity. This pack is pretty heavy, but this isn’t surprising considering the capacity.
USB Ports & LED
The front of the pack houses the usual USB ports, in this case rated at 3.4A total between the ports. There’s a white LED in the centre as a small torch, activated by double-clicking the button. A single click of the button lights up the 4 blue LEDs under the housing that indicate remaining battery capacity. Factory charging is via a standard µUSB connector in the side, at a maximum of 2A.
PCB Front
The front of the PCB holds the USB ports, along with most of the main control circuitry. At top left is a string of FS8025A dual-MOSFETs all in parallel for a current carrying capacity of 15A total, to the right of these is the ubiquitous DW01 Lithium-Ion protection IC. These 4 components make up the battery protection – stopping both an overcharge & overdischarge. The larger IC below is an EG1501 multi-purpose power controller.
This chip is doing all of the heavy lifting in this power pack, dealing with all the DC-DC conversion for the USB ports, charge control of the battery pack, controlling the battery level indicator LEDs & controlling the torch LED in the centre.
EG1501 Example
The datasheet is in Chinese, but it does have an example application circuit, which is very similar to the circuitry used in this powerbank. A toroidal inductor is nestled next to the right-hand USB port for the DC-DC converter, and the remaining IC next to it is a CW3004 Dual-Channel USB Charging Controller, which automatically sets the data pins on the USB ports to the correct levels to ensure high-current charging of the devices plugged in. This IC replaces the resistors R3-R6 in the schematic above.
The DC-DC converter section of the power chain is designed with high efficiency in mind, not using any diodes, but synchronous rectification instead.
PCB Back
The back of the PCB just has a few discrete transistors, the user interface button, and a small SO8 IC with no markings at all. I’m going to assume this is a generic microcontroller, (U2 in the schematic) & is just there to interface the user button to the power controller via I²C.
Cells
Not many markings on the cells indicating their capacity, but a full discharge test at 4A gave me a resulting capacity of 21Ah – slightly above the nameplate rating. There are two cells in here in parallel, ~10Ah capacity each.
XT60 Battery Connector
The only issue with powerbanks this large is the amount of time they require to recharge themselves – at this unit’s maximum of 2A through the µUSB port, it’s about 22 hours! Here I’ve fitted an XT60 connector, to interface to my Turnigy Accucell 6 charger, increasing the charging current capacity to 6A, and reducing the full-charge time to 7 hours. This splits to 3A charge per cell, and after some testing the cells don’t seem to mind this higher charging current.
Battery Connector Wiring
The new charging connector is directly connected to the battery at the control PCB, there’s just enough room to get a pair of wires down the casing over the cells.
Since I’ve discovered some nice high power PSUs in the form of Playstation 3 PSUs, it’s time to get a new Bench PSU Build underway!
Specifications
I’ve gone for the APS-227 version as it’s got the 32A rail. This makes things slightly beefier overall, as the loading will never be anywhere close to 100% for long, more headroom on the specs is the result.
Desktop Instrument Case
The case I’ve chosen for this is an ABS desktop instrument case from eBay, the TE554 200x175x70mm. The ABS is easy to cut the holes for all the through-panel gear, along with being sturdy enough. Aluminium front & back panels would be a nice addition for a better look.
PSU Mounted
The PSU board is removed from it’s factory casing & installed on the bottom shell half, unfortunately the moulded-in posts didn’t match the screw hole locations so I had to mount some brass standoffs separately. The AC input is also fitted here, I’ve used a common-mode filter to test things (this won’t be staying, as it fouls one of the case screw holes). The 40A rated DC output cable is soldered directly to the PCB traces, as there’s no room under the board to fit the factory DC power connector. (This is the biggest case I could find on eBay, and things are still a little tight). Some minor modifications were required to get the PCB to fit correctly.
Output Terminals & Adjuster
I decided to add some limited voltage adjustment capability to the front panel, I had a 100Ω Vishay Spectrol Precision 10-turn potentiometer in my parts bin, from a project long since gone that just about fits between the panel & the output rectifier heatsink. The trimpot I added when I first posted about these PSUs is now used to set the upper voltage limit of 15 volts. (The output electrolytics are 16v rated, and are in an awkward place to get at to change for higher voltage parts). The binding posts are rated to 30A, and were also left over from a previous project.
Vishay Spectrol 10-Turn
Addon Regulator Components
This front panel potentiometer is electrically in series with the trimpot glued to the top of the auxiliary transformer, see above for a simple schematic of the added components. In this PSU, reducing the total resistance in the regulator circuit increases the voltage, so make sure the potentiometer is wired correctly for this!
After some experimentation, a 500Ω 10-turn potentiometer would be a better match, with a 750Ω resistor in parallel to give a total resistance range on the front panel pot of 300Ω. This will give a lower minimum voltage limit of about 12.00v to make lead-acid battery charging easier.
I’ve had to make a minor modification to the output rectifier heatsink to get this pot to fit in the available space, but nothing big enough to stop the heatsink working correctly.
Terminal Posts
Here I’ve got the binding posts mounted, however the studs are a little too long. Once the wiring is installed these will be trimmed back to clear both the case screw path & the heatsink. (The heatsink isn’t a part of the power path anyway, so it’s isolated).
Power Meter Control Board & Fan
To keep the output rectifier MOSFETs cool, there’s a fan mounted in the upper shell just above their location, this case has vents in the bottom already moulded in for the air to exit. The fan is operated with the DC output contactor, only running when the main DC is switched on. This keeps the noise to a minimum when the supply doesn’t require cooling. The panel meter control board is also mounted up here, in the only empty space available. The panel meter module itself is a VAC-1030A from MingHe.
Meter Power Board
The measurement shunt & main power contactor for the DC output is on another board, here mounted on the left side of the case. The measurement shunt is a low-cost one in this module, I doubt it’s made of the usual materials of Manganin or Constantan, this is confirmed by my meansurements as when the shunt heats up from high-power use, the readings drift by about 100mA. The original terminal blocks this module arrived with have been removed & the DC cables soldered directly to the PCB, to keep the number of high-current junctions to a minimum. This should ensure the lowest possible losses from resistive heating.
Meter Panel Module
The panel meter module iself is powered from the 5v standby rail of the Sony PSU, instead of the 12v rail. This allows me to keep the meter on while the main 12v output is switched off.
PSU Internals
here’s the supply with everything fitted to the lower shell – it’s a tight fit! A standard IEC connector has been fitted into the back panel for the mains input, giving much more clearance for the AC side of things.
Inside View
With the top shell in place, a look through the panel cutout for the meter LCD shows the rather tight fit of all the meter components. There’s about 25mm of clearance above the top of the PSU board, giving plenty of room for the 40mm cooling fan to circulate air around.
Load Test
Here’s the finished supply under a full load test – it’s charging a 200Ah deep cycle battery. The meter offers many protection modes, so I’ve set the current limit at 30A – preventing Sony’s built in over current protection on the PSU tripping with this function is a bonus, as the supply takes a good 90 seconds to recover afterwards. I’ll go into the many modes & features of this meter in another post.
Over the past few weeks, the host I’ve been with for over 3 years, OVH, announced a rather large price increase of 20% because of Brexit – the current universal excuse to squeeze the customer for more cash. This change has sent the price of my dedicated server solution with them to over £45 a month. Doing some napkin-calculation gave me £18 a month in extra power to run a small server locally. So I’ve decided to bring the hosting solution back to my local network & run from my domestic internet link, which at 200Mbit/s DL & 20Mbit/s UL should be plenty fast enough to handle the modest levels of traffic I usually get.
Obviously, some hardware was required for this, so I obtained this beauty cheap on eBay:
HP Proliant MicroServer Gen 8
This is a Gen 8 HP Proliant Microserver, very small & quiet, perfect for the job. This came with 4GB of RAM installed from the factory, and a Celeron G1610T running at 2.3GHz. Both are a little limited, so some upgrades will be made to the system.
Disk Bays
4 SATA drive bays are located behind the magnetically-locked front door, there’s a 250GB boot disk in here along with a pair of 500GB disks in RAID1 to handle the website files & databases. For my online file hosting site, the server has a backend NFS link direct to Volantis – my 28TB storage server. This arrangement keeps the large file storage side of things off the web server disks & on a NAS, where it should be.
Extra RAM
First thing is a RAM upgrade to the full supported capacity of 16GB. This being a Proliant server machine, doesn’t take anything of a standard flavour, it’s requirements are DDR3-10600E or DDR3-12800E (the E in here being ECC). This memory is both eye-wateringly expensive & difficult to find anywhere in stock. It’s much cheaper & easier to find the ECC Registered variety, but alas this isn’t compatible.
Over the past 48 hours or so, I’ve been migrating everything over to the new baby server, with a couple of associated teething problems, but everything seems to have gone well so far. The remaining job to get everything running as it should is an external mail relay – sending any kind of email from a dynamic IP / domestic ISP usually gets it spam binned by the big providers instantly, regardless of it actually being spam or not – more to come on that setup & configuring postfix to use an external SMTP relay server soon!
If anyone does find something weird going on with the blog, do let me know via the contact page or comments!
I’m making some changes to my hosting services, I’ve been testing Sentora, as it’s much more user friendly, if a little more limited in what it’s capable of doing, vs my go-to admin panel over the past 6+ years, Virtualmin.
I noticed that SpamAssassin isn’t set up on a Sentora server by default, so here’s a script that will get things working under a fresh Sentora install in CentOS 7:
After this script has run, some mail server settings will be changed, and the master.cf configuration file for Postfix will be backed up just in case it craps out.
Make sure the SpamAssassin daemon is running on port 783 with this command:
ss -tnlp | grep spamd
Testing is easy, send an email to an address hosted by Sentora with the following in the subject line:
If SpamAssassin is working correctly, this will be tagged with a spam score of 999.
A useful script is below, this trains SpamAssassin on the mail in the current server mailboxes. I’ve been using a version of this for a long time, this one is slightly modified to operate with Sentora’s vmail system. All mail for all domains & users will be fed into SpamAssassin in this script. I set this to run nightly in cron.
#!/bin/bash
#specify one or more users, space padded [user=(user1 user2 user3)] or empty [user=()] to include all users. All users is considered uid ≥ 1000.
user=(vmail)
#After how many days should Spam be deleted?
cleanafter=30
#backup path, comment out to disable backups
bk=/home/backup/sa-learn_bayes_`date +%F`.backup
log=/var/log/train-mail.log
#log=/dev/stdout
echo -e "\n`date +%c`" >> $log 2>&1
if [ -z ${user[@]} ]; then
echo user is empty, using all users from system
user=(`awk -F':' '$3 >= 1000 && $3 < 65534' /etc/passwd |awk -F':' '{print $1}'`)
fi
for u in ${user[@]}; do
if [ ! -d /var/sentora/vmail/*/* ]; then
echo "No such Maildir for $u" >> $log 2>&1
else
echo "Proceeding with ham and spam training on user \"$u\""
#add all messages in "junk" directory to spamassassin
echo spam >> $log 2>&1
#change this path to match your spam directory, in this case its "Junk"
#add current and new messages in Junk directory as spam
sa-learn --no-sync --spam /var/sentora/vmail/*/*/.Junk/{cur,new} >> $log 2>&1
echo ham >> $log 2>&1
#only add current mail to ham, not new. This gives user a chance to move it to spam dir.
sa-learn --no-sync --ham /var/sentora/vmail/*/*/{cur} >> $log 2>&1
fi
done
#sync the journal created above with the database
echo sync >> $log 2>&1
sa-learn --sync >> $log 2>&1
if [ $? -eq 0 ]; then
for u in ${user[@]}; do
echo "deleting spam for $u older than 30 days" >> $log 2>&1
find /var/sentora/vmail/*/*/.Junk/cur/ -type f -mtime +$cleanafter -exec rm {} \;
done
else
echo "sa-learn wasn't able to sync. Something is broken. Skipping spam cleanup"
fi
echo "Statistics:" >> $log 2>&1
sa-learn --dump magic >> $log 2>&1
echo ============================== >> $log 2>&1
if [ -n $bk ]; then
echo "backup writing to $bk" >> $log 2>&1
sa-learn --backup > $bk
fi
Here’s another Diesel-fired heater related project – these Webasto heaters are fitted to Jaguar S-Type cars as auxiliary heaters, since (according to the Jag manual), the modern fuel-efficient diesels produce so little waste heat that extra help is required to run the car’s climate control system. (Although this seems to nullify any fuel efficiency boost, as the fuel saved by not producing so much waste heat in the engine itself is burned in an aux heater to provide heat anyway). The unfortunate part is these units don’t respond to applying +12v to Pin 1 of the ECU to get them to start – they are programmed to respond to CAN Bus & K-Line Bus only, so they require a bit more effort to get going. They also don’t have a built-in water circulation pump unlike the Webasto Thermo Top C heaters – they expect the water flow to be taken care of by the engine’s coolant pump.
Webasto LabelWater Side
The water ports are on the side of this heater instead of the end, the heat exhanger is on the left. These hearers are fitted to the car under the left front wing, behind a splash guard. Pretty easy to get to but they get exposed to all the road dirt, water & salt so corrosion is a little problem. The fuel dosing pump is in a much more difficult spot to get at – it’s under the car next to the fuel tank on the right hand side. Access to the underside with stands is required to get at this.
ECU Side
The ECU side has all the other connections – Combustion air, exhaust, fuel, power & control.
External Connectors
Only two of the external connectors are used on these heaters, the large two pin one is for main power – heavy cable required here as the current draw can climb to ~30A on startup while the glow plug fires. The 8-pin connector on the left is the control connector, where the CAN / K-Line / W-Bus buses live. The fuel dosing pump is also supplied from a pin on this connector. The small 3-pin under that is a blank for a circulation pump where fitted. Pinouts are here:
Pin
Signal
1
Battery Positive
2
Battery Negative
Pin Number
Signal
Notes
1
Telestart / Heater Enable
Would usually start the heater with a simple +12v ON signal, but is disabled in these heaters.
2
W-Bus / K-Line
Diagnostic Serial Bus Or Webasto Type 1533 Programmer / Clock
3
External Temp Sensor
4
CAN-
CAN Bus Low
5
Fuel Dosing Pump
Fuel Pump output. Connect pump to this pin & ground. Polarity unimportant.
6
Solenoid Valve
Fuel cutoff solenoid optionally fitted here.
7
CAN+
CAN Bus High
8
Cabin Heater Fan Control
This output switches on when heater reaches +50°C to control car heater blower
Pin
Signal
Notes
1
?
?
2
Circulation Pump +
3
Circulation Pump -
ECU Cover Removed
Removing the clipped-on plastic cover reveals the other ECU connectors. The large white one feeds the glow plug, & the large multi-pin below brings in the temp & overheat sensor signals.
MC9S12DT128B Microcontroller
The heart of the ECU is a massive microcontroller, a Freescale MC9S12DT128B, attached to a daughterboard hooked into the ECU power board.
Power Section
The high power section is on the board just under the connectors, here all the large semiconductors live for switching the fan motor, glow plug, external loads, etc.
LIN & CAN Bus Transceivers
The bus transceivers are separate ICs on the control board, a TJA1041 takes care of the CAN bus. There’s also a TJA1020 LIN bus transceiver here, which is confusing since none of the Webasto documentation mentions LIN bus control.
Combustion Fan Motor
The combustion fan motor is in the ECU compartment, nicely sealed away from the elements. There is no speed sensor on these blowers, unlike the Eberspacher ones.
Motor Details
The motor is a Buhler, rated at 10.5v.
Water Ports & Combustion Fan Cover
Unclipping the cover from the other end reveals the combustion fan, it’s under the black cover. (These are side-channel blowers, to provide the relatively high static pressure required to run the burner).
Sensor Clip
The overheat & temperature sensors are on the end of the heat exchanger, retained by a stainless clip.
Temp & Overheat Sensors
With the clip removed, the sensors can be seen better. There’s some pretty bad corrosion of the aluminium alloy on the end sensor, it’s seized in place.
Burner
The heater splits in half to reveal the evaporative burner itself. I’ve already cleaned the black crud off with a wire brush here, doesn’t look like this heater has seen much use as it’s pretty clean inside.
Burner Chamber
Inside the burner the fuel evaporates & is ignited. There is a brass mesh behind the backplate of the burner to assist with vaporisation.
Glow Plug
The glow plug is fitted into the side of the burner ceramic here. This is probably a Silicon Carbide device. It also acts as a flame sensor when the heater has fired up. The fuel inlet line is to the left under the clamp.
Heat Exhanger
The hot gases from the burner flow into the heat exchanger here, with many fins to increase the surface area. There’s only a couple of mm coating of carbon here, after 10 years on the car I would have expected it to be much more clogged.
I’m currently waiting on some components to build an interface so I can get the Webasto Thermo Test software to talk to the heater. Once this is done I can see if there are any faults logged that need sorting before I can get this heater running, but from the current state it seems to be pretty good visually. More to come once parts arrive!
The full service manual for these heaters can be grabbed from here, along with the wiring details for the Jaguar implementation & the Thermo Test software for talking to them:
This is a chip aimed at the automotive market – this is a low power voltage regulator for supplying power to microcontrollers, for instance in a CD player.
TDA3606 Die
The TDA3606 is a voltage regulator intended to supply a microprocessor (e.g. in car radio applications). Because of low voltage operation of the application, a low-voltage drop regulator is used in the TDA3606. This regulator will switch on when the supply voltage exceeds 7.5 V for the first time and will switch off again when the output voltage of the regulator drops below 2.4 V. When the regulator is switched on, the RES1 and RES2 outputs (RES2 can only be HIGH when RES1 is HIGH) will go HIGH after a fixed delay time (fixed by an external delay capacitor) to generate a reset to the microprocessor. RES1 will go HIGH by an internal pull-up resistor of 4.7 kΩ, and is used to initialize the microprocessor. RES2 is used to indicate that the regulator output voltage is within its voltage range. This start-up feature is built-in to secure a smooth start-up of the microprocessor at first connection, without uncontrolled switching of the regulator during the start-up sequence. All output pins are fully protected. The regulator is protected against load dump and short-circuit (foldback
current protection). Interfacing with the microprocessor can be accomplished by means of a battery Schmitt-trigger and output buffer (simple full/semi on/off logic applications). The battery output will go HIGH when the battery input voltage exceeds the HIGH threshold level.
Here’s a piece of tech that is growing all the more important in recent times, with devices with huge battery capacities, a quick charger. This unit supports Qualcomm’s Quick Charge 3 standard, where the device being charged can negotiate with the charger for a higher-power link, by increasing the bus voltage past the usual 5v.
Rear
The casing feels rather nice on this unit, sturdy & well designed. All the legends on the case are laser marked, apart from the front side logo which is part of the injection moulding.
Specifications
The power capacity of this charger is pretty impressive, with outputs for QC3 from 3.6-6.5v at 3A, up to 12v 1.5A. Standard USB charging is limited at 4.8A for the other 3 ports.
Ports
The two of the 5 USB ports are colour coded blue on the QC3 ports. The other 3 are standard 5v ports, the only thing that doesn’t make sense in the ratings is the overall current rating of the 5v supply (4.8A), and the rated current of each of the ports (2.4A) – this is 7.2A total rather than 4.8A.
Top Removed
The casing is glued together at the seam, but it gave in to some percussive attack with a screwdriver handle. The inside of this supply is mostly hidden by the large heatspreader on the top.
Main PCB Bottom
This is a nicely designed board, the creepage distances are at least 8mm between the primary & secondary sides, the bottom also has a conformal coating, with extra silicone around the primary-side switching transistor pins, presumably to decrease the chances of the board flashing over between the close pins.
On the lower 3 USB ports can be seen the 3 SOT-23 USB charge control ICs. These are probably similar to the Texas Instruments TPS2514 controllers, which I’ve experimented with before, however I can’t read the numbers due to the conformal coating. The other semiconductors on this side of the board are part of the voltage feedback circuits for the SMPS. The 5v supply optocoupler is in the centre bottom of the board.
Heatsink Removed
Desoldering the pair of primary side transistors allowed me to easily remove the heatspreader from the supply. There’s thermal pads & grease over everything to get rid of the heat. Here can be seen there are two transformers, forming completely separate supplies for the standard USB side of things & the QC3 side. Measuring the voltages on the main filter capacitors showed me the difference – the QC3 supply is held at 14.2v, and is managed through other circuits further on in the power chain. There’s plenty of mains filtering on the input, as well as common-mode chokes on the DC outputs before they reach the USB ports.
Quick Charge 3 DC-DC Converters
Here’s where the QC3 magic happens, a small DC-DC buck converter for each of the two ports. The data lines are also connected to these modules, so all the control logic is located on these too. The TO-220 device to the left is the main rectifier.
Here’s an eBay oddity – it’s got the same light & lens mechanism as the cheap “disco light” style bulbs on eBay, but this one is battery powered & has a built in MP3 player.
MP3 Disco Light
This device simply oozes cheapness. The large 4″ plastic dome lens sits on the top above the cheap plastic moulding as a base, which also contains the MP3 player speaker.
Controls
There are few controls on this player, the volume buttons are combined with the skip track buttons, a long press operates the volume control, while a short press skips the tracks. Several options for getting this thing to play music are provided:
Bluetooth – Allows connection from any device for bluetooth audio
USB – Plugging in a USB flash drive with MP3 files
SD Card – Very similar to the USB flash drive option, just a FAT32 formatted card with MP3 files
Aux – There’s no 3.5mm jack on this unit for an audio input, instead a “special” USB cable is supplied that is both used to charge the built in battery & feed an audio signal. This is possible since the data lines on the port aren’t used. But it’s certainly out of the ordinary.
Top Removed
The top comes off with the removal of a single screw in the centre of the lens. The shaft in the centre that holds the lens is attached to a small gear motor under the LED PCB. There’s 6 LEDs on the board, to form an RGB array. Surprisingly for a very small battery powered unit these are bright to the point of being utterly offensive.
Mainboard
Here’s the mainboard removed from the plastic base. There’s not much to this device, even with all the options it has. The power switch is on the left, followed by the Mini-B USB charging port & aux audio input. The USB A port for a flash drive is next, finishing with the µSD slot. I’m not sure what the red wire is for on the left, it connects to one of the pins on the USB port & then goes nowhere.
Audio Amplifier
The audio amplifier is a YX8002D, I couldn’t find a datasheet for this, but it’s probably Class D.
Main Chipset
Finally there’s the main IC, which is an AC1542D88038. I’ve not been able to find any data on this part either, it’s either a dedicated MP3 player with Bluetooth radio built in, or an MCU of some kind.The RF antenna for the Bluetooth mode is at the top of the board.
Just behind the power switch is a SOT23-6 component, which should be the charger for the built in Lithium Ion cell.
Lithium Ion Cell
The cell itself is a prismatic type rated in the instructions at 600mAh, however my 1C discharge test gave a reading of 820mAh, which is unusual for anything Li-Ion based that comes from eBay 😉
There is cell protection provided, it’s under the black tape on the end, nothing special here.
The main issue so far with this little player is the utterly abysmal battery life – at full volume playing MP3s from a SD card, the unit’s current draw is 600mA, with the seizure & blindness-inducing LEDs added on top, the draw goes up to about 1200mA. The built in charger is also not able to keep up with running the player while charging. This in all only gives a battery life of about 20 minutes, which really limits the usability of the player.
With the installation of the new diesel fired heater we’ve noticed a small problem – since the only heat source in the saloon is the stove, even with the diesel heater fired up the temperature doesn’t really change much, as the heat from the radiators in the both the cabins & the head isn’t spreading far enough.
The solution to this problem is obviously an extra radiator in the saloon, however there isn’t the space to fit even a small domestic-style radiator. eBay turned up some heater matrix units designed for kit cars & the like:
3.8kW Matrix
These small heater matrix units are nice & compact, so will fit into the back of a storage cupboard next to the saloon. Rated at a max heat output of 3.8kW, just shy of the stove’s rated 4kW output power, this should provide plenty of heating when we’re running the diesel heater rather than the fire.
Water & Power
The blower motor has a resistor network to provide 3 speeds, but this probably won’t be used in this install, water connections are via 15mm copper tails. The current plan is to use a pipe thermostat on the flow from the boiler to switch on the blower when the water temperature reaches about 40°C.
Hot Air Outlets
The hot air emerges from the matrix via 4 55mm duct sockets. This gives enough outlets to cover both the saloon & the corridor down to the cabins.
Hot Air Vents
Standard 60mm Eberspacher style vents will be used to point the warmth where it’s needed.
Here’s a useful tool for testing both power supplies & batteries, a dummy load. This unit is rated up to 60W, at voltages from 1v to 25v, current from 200mA to 9.99A.
This device requires a 12v DC power source separate from the load itself, to power the logic circuitry.
Microcontroller Section
Like many of these modules, the brains of the operation is an STM8 microcontroller. There’s a header to the left with some communication pins, the T pin transmits the voltage when the unit is operating, along with the status via RS232 115200 8N1. This serial signal is only present in DC load mode, the pin is pulled low in battery test mode. The 4 pins underneath the clock crystal are the programming pins for the STM8.
Serial CommsCooling Fan
The main heatsink is fan cooled, the speed is PWM controlled via the microcontroller depending on the temperature.
Main MOSFET
The main load MOSFET is an IRFP150N from Infineon. This device is rated at 100v 42A, with a max power dissipation of 160W. On the right is a dual diode for reverse polarity protection, this is in series with the MOSFET. On the left is the thermistor for controlling fan speed.
Load Terminals
The load is usually connected via a rising clamp terminal block. I’ve replaced it with a XT60 connector in this case as all my battery holders are fitted with these. This also removes the contact resistance of more connections for an adaptor cable. The small JST XH2 connector on the left is for remote voltage sensing. This is used for 4-wire measurements.
Function 1 – DC Load
Powering the device up while holding the RUN button gets you into the menu to select the operating modes. Function 1 is simple DC load.
Function 2 – Battery Capacity Mode
The rotary encoder is used to select the option. Function 2 is battery capacity test mode.
Beeper Mode
After the mode is selected, an option appears to either turn the beeper on or off.
Amps Set
When in standby mode, the threshold voltage & the load current can be set. Here the Amps LED is lit, so the load current can be set. The pair of LEDs between the displays shows which digit will be changed. Pressing the encoder button cycles through the options.
Volts Set
With the Volts LED lit, the threshold voltage can be changed.
When in DC load mode (Fun1), the device will place a fixed load onto the power source until it’s manually stopped. The voltage setting in this mode is a low-voltage alarm. The current can be changed while the load is running.
When in battery discharge test mode (Fun2), the voltage set is the cutoff voltage – discharge will stop when this is reached. Like the DC load mode, the current can be changed when the load is running. After the battery has completed discharging, the capacity in Ah & Wh will be displayed on the top 7-segment. These results can be selected between with the encoder.
Below are tables with all the options for the unit, along with the error codes I’ve been able to decipher from the Chinese info available in various places online. (If anyone knows better, do let me know!).
Option
Function
Fun1
Basic DC Load
Fun 2
Battery Capacity Test
BeOn
Beeper On
BeOf
Beeper Off
Error Code
Meaning
Err1
Input Overvoltage
Err2
Low Battery Voltage / No Battery Present / Reverse Polarity
Err3
Battery ESR Too High / Cannot sustain selected discharge current
Err4
General Failure
Err6
Power Supply Voltage Too Low / Too High. Minimum 12v 0.5A.
Well it’s time for a new DMM. After the last pair of eBay El-Cheapo Chinese meters just didn’t last very well, I decided a proper meter was required. This one is a Tenma 72-10405, stocked by Farnell for under £60. Not quite as many festures as the cheapo Chinese meters, but I expect this one to be a bit more reliable.
PCB Rear
Since I can’t have anything without seeing how it’s put together, here’s the inside of the DMM. (Fuse access is only possible by taking the back cover off as well. The 9v PP3 battery has a seperate cover).
PCB Rear Bottom
He’s the input section of the meter, with the 10A HRC fuse & current shunt for the high-amps range. The other fuse above is for the mA/µA ranges. The back cover has a wide lip around the edge, that slots into a recess in the front cover, presumably for blast protection if the meter should meet a sticky end. The HRC fuses are a definite improvement over the cheap DMMs, they only have 15mm glass fuses, and no blast protection built into the casing.
There are some MOVs for input protection on the volts/ohms jack, the jacks themselves are nothing more than stampings though.
PCB Rear Top
Not much at the other side of the board, there’s the IR LED for the RS232 interface & the beeper.
PCB Front
Most of the other components are on the other side of the PCB under the LCD display. The range switch is in the centre, while the main chipset is on the left.
DMM Chipset
The chipset of this meter is a FS9922-DMM3 from Fortune Semiconductor, this is a dedicated DMM chipset with built in ADCs & microcontroller.
As one of my current projects involves a small petrol engine – a Honda GX35 clone, I figured an hour counter would be very handy to keep an eye on service intervals. (More to come on the engine itself later on). I found a device that would suit my needs on good old eBay.
Inductive Engine Monitor
These engine monitors are pretty cheap, at about £4. The sensing is done by a single heat-resistant silicone wire, that wraps around the HT lead to the spark plug. The unit can be set for different firing intervals via the buttons. In the case of most single-cylinder 4-stroke engines, the spark plug fires on every revolution – wasted-spark ignition. This simplifies the ignition system greatly, by not requiring the timing signal be driven from 1/2 crankshaft speed. The second “wasted” spark fires into the exhaust stroke, so has no effect.
Internals
The back cover is lightly glued into place with a drop of cyanoacrylate in opposite corners, but easily pops off. The power is supplied by a soldered-in 3v Lithium cell. The main microcontroller has no number laser etched on to it at all – it appears it skipped the marking machine.
Input Filtering
The input from the sensing wire comes in through a coupling capacitor & is amplified by a transistor. It’s then fed into a 74HC00D Quad 2-Input NAND gate, before being fed into the microcontroller.
Pickup
The pickup wire is simply wound around the spark plug lead. I’ve held it in position here with some heatshrink tubing. Heat in this area shouldn’t be an issue as it’s directly in the airflow from the flywheel fan.
Here’s a useful buck-boost DC-DC converter from eBay, this one will do 36v DC at 6A maximum output current. Voltage & current are selected on the push buttons, when the output is enabled either the output voltage or the output current can be displayed in real time.
Display PCB
Here’s the display PCB, which also has the STM32 microcontroller that does all the magic. There appears to be a serial link on the left side, I’ve not yet managed to get round to hooking it into a serial adaptor to see if there’s anything useful on it.
Display Drive & Microcontroller
The bottom of the board holds the micro & the display multiplexing glue logic.
Main PCB
Not much on the mainboard apart from the large switching inductors & power devices. There’s also a SMPS PWM controller, probably being controlled from the micro.
Here’s another battery charger designed for lithium chemistry cells, the BLU4. This charger doesn’t display much on it’s built in LCD, apart from basic cell voltage & charging current limits, as it has a built in Bluetooth module that will link into an Android or iOS app.
Above the charger is operating with 4 brand new cells, at a current of 500mA per cell. If only a pair of cells is being charged, the current can be increased to 1A per cell.
LCD
Not much in the way of user interface on the charger, a tiny LCD & single button for cycling through the display options.
Dataplate
The usual stuff on the data plate, the charger accepts an input of 12v DC at 1A.
Bottom Cover Removed
Removing the 6 screws on the bottom of the casing allows the board to be seen. Not much on the bottom, the 4 cell negative connections can be seen, with their springs for adjusting for cell length.
MOSFETs
There’s a couple of P-Channel FETs on the bottom side for the charging circuits, along with some diodes.
Main PCB
The main PCB is easily removed after the springs are unhooked from the terminals. Most of the power circuitry is located on the top side near the power input. There are 4 DC-DC converters on board for stepping the input 12v down to the 4.2v required to charge a lithium cell.
Second Controller
Not entirely sure what this IC is in the bottom corner, as it’s completely unmarked. I’m guessing it’s a microcontroller though.
DC Input Side
The top left of the board is crammed with the DC-DC converters, all the FETs are in SO8 packages.
DC-DC Converters
One pair of DC-DC inductors is larger than the other pair, for reasons I’m unsure of.
Bluetooth Module
Bluetooth connectivity is provided by this module, which is based around a TTC2541 BLE IC.
Microcontroller
Below the Bluetooth module is yet another completely unmarked IC, the direct link to the BLE interface probably means it’s another microcontroller. The Socket to the left of the IC is the connector for the front panel LCD & button.
LCD PCB
There’s not much to the LCD itself, so I won’t remove this board. The LCD controller is a COB type device, from the number of connections it most likely communicates with the micro via serial.
For the latest big project, replacing the battery bank on the boat with 5 brand new 200Ah Yuasa heavy duty flooded lead acids, I’m going to need to make many short links from heavy battery cable to connect all 5 batteries into a parallel bank.
Cutting cable as big in diameter as a good sized thumb is difficult at best. In the past I’ve used a hacksaw, but it doesn’t do a very clean job, especially as the cut nears the end – strands get ripped from the cable by the relatively coarse blade & this reduces the current carrying capacity.
Over to eBay again netted a pair of ratchet-type heavy duty cable cutters for £30. These are rated to cut cable up to 240mm² or 600MCM.
Cutting Jaws
The cutting head on these snips is massive – cutting through cable up to 35mm in diameter takes some force. The ratchet mechanism is used to get a large mechanical advantage to force the cutters through the copper, without having to resort to more expensive & complex mechanisms such as hydraulics. (Hydraulic cable cutters do exist, but cost a small fortune & are totally over-rated for the job).
Overall the tool seems to be well made, the handles are Vinyl dipped to make them more comfortable, which certainly helps when applying a large amount of force. Running a file over the cutters themselves reveals they’re actually hardened – unusual for cheapo Chinese tools.
SG-HM2 is a modular He-Ne laser power supply based on IC-HI1 with some minor enhancements. The first version is for laser tubes up to approximately 1 mW (2 mW with trivial modifications) but it should be straightforward to go to 5 mW or even higher power tubes by replacing the SG-HM2 HV Module (HVM2-1) with one with a higher voltage and current rating, along with a higher power MOSFET and minor component value changes to the Control Module (suggestions below). I have added an adjustment for tube current, a current limiting resistor and Zener to protect against output short circuits, an enable input (ground to turn on), a bleeder resistor to virtually eliminate the shock hazard after the power supply is turned off, and power and status LEDs.
Get the schematic for SG-HM2 (1 mW version) in PDF format: [download id=”5610″]
Modifying SG-HM2 for Higher Power He-Ne Laser Tubes
The following are guidelines for modifying SG-HM2 to drive various power He-Ne lasers. The PCB layout below with two versions of the HV Module should accommodate He-Ne laser tubes up to 10 mW. All assume input of around 12 V though a higher power system can generally run lower power lasers at reduced input voltage. If operation at rated power on another input voltage is desired, the number of turns on the inverter transformer can be adjusted accordingly. As noted above, the 1 mW HV Module (HVM2-1) should run tubes up to about 2 mW, though increasing the µF values of some of the HV capacitors may be desirable to reduce ripple at the higher tube current. Minor changes may also be needed in the components on the SG-HM2 Control Module including using a higher power MOSFET for Q1 and reducing the values of R7 and/or R8 for the higher tube current. Or, just populate the Control Module with Q1 being an IRF644, R7 being 150 ohms, and R8 being 750 ohms for compatibility with all the HV modules. For that matter, the HVM2-5 PCB HV Module should be usable with lower power lasers.
Laser Power 1 mW 2 mW 5 mW 10 mW
-----------------------------------------------------------------------
Voltage 1200 V 1500 V 2300 V 3500 V
Current 2-4mA 3-5mA 5-7mA 5-7mA
SG-HM2 HV Module:
PCB Version HVM2-1 HVM2-1 HVM2-5 HVM2-5
T101
Core (DxH) 18x11 mm 18x11 mm 26x16 mm 26/16 mm
Primary 9T,#28 9T,#28 9T,#26 9T,#26
Secondary 450T,#40 450T,#40 600T,#40 900T,#40
Res. (Est) 60 ohms 60 ohms (90 ohms) (120 ohms)
D101-106 2kV 2kV 3kV 5kV
C101-104 1nF,3kV 2nF,3kV 2nF,6kV 2nF,6kV
C105 47pF,3kV 47pF,3kV 100pF,6kV 100pF,6kV
C106 3nF,10kV 5nF,10kV 6nF,15kV 6nF,15kV
R102 10K,1/2W 10K,1/2W 10K,1W 10K,1W
R103 200M,10kV 200M,10kV 200M,15kV 200M,15kV
R106-107 (total) 10M 10M 15M 20M
SG-HM2 Control Module:
Q1 IRF630 IRF630 IRF640 IRF644
R7 300 250 150 150
R8 500 250 100 100
SG-HM2 Inverter Transformer
The inverter transformer for HVM2-1 is wound on a ferrite pot core with a small air-gap (about 0.005″). It is 18 mm in diameter by 11 mm high. While specified to use a 9 turn primary and 450 turn secondary, these values can be adjusted somewhat to handle various input and output requirements. Don’t go much lower on the primary as this may result in core saturation. The 9/450 transformer should be fine for 1 to 2 mW He-Ne laser tubes running on 8 to 15v DC input. With 9/300, it will operate on about 12 to 20v DC. Increasing the number of secondary turns (e.g., 9/600) may result in operation on a slightly lower input voltage, but probably not by much. The 9/450 transformer may even run He-Ne laser tubes larger than 2 mW but I haven’t yet tested this since I haven’t built a prototype of HVM2-5 as yet.
It doesn’t matter very much whether the primary (P) is wound first or the secondary (S) is wound first though the former appears to work slightly better, running the tube at about 8v DC input instead of 9v DC input for the same 9/450 transformer. P over S is slightly easier to wind since the primary doesn’t get in the way and increase the lumpiness of the secondary layers. However, with S over P, insulation is somewhat less critical since the HV lead is out away from anything else. With the P over S, additional insulation is needed between them. Also, since the primary coil is larger diameter, it will have more resistance and there will be greater inter-winding capacitance (though probably not significant). The secondary should be constructed as multiple layers of about 50 or 60 turns each, with insulating tape between layers. Each should be wound in as close to a single layer as possible with alternating layers staggered to prevent arc-over. This doesn’t have to be perfect but try to go gradually from one side to the other to keep wires at high relative potential away from each other. Make sure the HV output leads (particularly the one away from the dot) are well insulated as they exit the transformer. And, as noted, if the primary is over the secondary, there must be high voltage insulation between them. The peak output voltage when the MOSFET turns off (the flyback pulse) may be more than 5 times higher than what would be expected from the DC input voltage and the turns-ratio alone – several kV and this *will* try to find a path to ground! There are more detailed transformer construction instructions in the next section.
Note that this transformer is slightly larger physically than the one from IC-HI1. This is for two reasons: (1) It is easier to wind with more space and a larger wire size for the secondary, and (2) continuous operation should be possible with 2 mW laser tubes, which might have been marginal with the original transformer used in IC-HI1. A by-product of the larger core is that its 9 turn primary should be roughly equivalent to the 12 turn primary of the smaller core in terms of inductance and core saturation limitations.
Interestingly, a similar transformer found in a different commercial power supply, had no insulating tape anywhere. It would appear that with very precise machine-wound HV secondary, done first, the voltage is distributed so uniformly that this is unnecessary.
I’ve now built and tested several transformers in IC-HI1, removing the original transformer and installing socket pins so either the original or an adapter board can be plugged in. This setup is then equivalent to SG-HM2 with the HVM2-1 HV Module. The minimum input voltage values that follow are when driving a 0.5 mW He-Ne laser tube:
Turns Pot Core Vin (VDC)
ID P/S Order (DxH mm) Min Max Comments
------------------------------------------------------------------------------
1* 12/600 S over P 14x8 7.5 15 Original IC-HI1 transformer
2 12/350 S over P 18x11 14 22 First prototype, described above
3 9/350 S over P 18x11 11 18 #2 with 3 P T added out-of-phase
4 9/425 P over S 18x11 9 16
5 9/450 P over S 18x11 9 16
6 9/450 S over P 18x11 8 15
7 12/500 P over S 26x16 8 15
*The number of turns on the original (#1) is not really known exactly and may be lower or higher by up to 25 percent based on the measured secondary resistance (45 ohms) and estimated wire size (somewhere between #38 and #40. (Even with the larger wire, the amount of bobbin area taken up by the wire is less than 50 percent so it should fit even with many layers of insulating tape. The transformer is Epoxy impregnated and likely to be impossible to disassemble into any form that can be analyzed!)
All of these transformers will drive He-Ne laser tubes of up to at least 2.5mW using the equivalent of the HVM2-1 HV Module which is part of IC-HI1. Even with the 2.5mW tube, the minimum operating voltage was only about 0.5v higher than for the 0.5mW tube. There is a good chance they would drive even larger He-Ne laser tubes (though possibly at a slightly higher input voltage) but I don’t dare try using the existing HV circuitry as it might not survive for long. I suspect that transformers #4, #5, and #6 would run on an input voltage of less than 8v DC but the salvaged cores I am using have a larger air-gap than might be optimal and I don’t have anything to reduce it without heavy losses. They attempt to start the tube at around 6v DC but are unable to maintain it and flicker rapidly. (#2 and #3, which use the same style core, would also benefit somewhat.) Operation using #1 and #5 is virtually identical, with the original running at perhaps 0.5v DC less input. I expect they would be even more identical if the air-gap on #5 were smaller, and #6 with its smaller air-gap does indeed run at the lower input voltage. I haven’t actually confirmed that anything blows up above the maximum voltages listed above, which were arbitrarily chosen. But I am guessing that bad things might happen at some point. 🙂
I have also constructed a transformer which will need to be used with HVM2-5: 12/1200, P over S, on a 30×19 pot core. I will also construct a 9/900. S over P, on a 30×19 pot core (or on a 26×16 if I can find one). Testing of these will have to await an HVM2-5 prototype.
SG-HM2 Transformer Construction
Here are details on construction of the inverter transformer for SG-HM2. With all parts and tools on hand, it takes about an hour start to finish. Only a small portion of this time is in the actual winding (at least if a coil winding machine is used). Most of the time is spent in adding the insulation tape and terminating the leads. After constructing a few of these, it does go quicker. 🙂
Step-by-step instructions are provided for the HVM2-1 transformer. The changes needed for HVM2-5 are summarized at the end of this section. Some sort of coil winding machine is almost essential as #40 wire is extremely thin and easy to break. (Anything larger than #40 will not fit on the bobbin.) It doesn’t have to be fancy. Mine is probably 50 years old of the type that is (used to be?) advertised in the back of electronics magazines. However, a couple of spindles – one that is fixed or free to rotate for the wire supply and the other which can be turned for the coil being wound – are really all that are needed. Don’t use any sort of powered approach though (unless you have a *real* professional coil winder!) as it is all too easy to break the wire if there is no tactile feedback to detect snags.
Parts required for T101 of HVM2-1:
18×11 mm (1811) ferrite pot core with a small air-gap (no more than 0.005″) or no air-gap, and a single section bobbin. These are available from several manufacturers but surplus or salvaged cores may be easier to obtain. Radio Shack used to have a “ferrite kit” which included a variety of sizes of cores (only 1 each though so you’d have to buy two kits and there were no bobbins!). I doubt the kit still exists though.
Approximately 1.5 feet of #28 magnet wire for the primary (9 turns wound first) and approximately 60 feet of #40 magnet wire for the secondary (450 turns wound on top of the primary). I found both these size wire in various solenoids and relays I’ve discombobulated. 🙂 Wire sizes aren’t critical but these are known to fit and the #40 can be handled with a reasonable chance of not breaking.
Sleeving to protect the primary wires where they leave transformer. I used approximately 2″ of insulation (each lead) from the individual wires in some 25 pair phone cable.
Wirewrap wire or other thin insulated wire to terminate the secondary wires where they leave the transformer.
Insulating tape. 1 mil Mylar or similar is desirable. However, I’ve found that thin clear (non-reinforced) packing tape does an adequate job, though it probably doesn’t have as much dielectric strength as real insulating tape so additional layers are required. It will also likely not stand up to overheating too well. Electrical tape is way too thick and would prevent enough turns from fitting.
A piece of Perf. board with holes on 0.1″ centers, 0.8″x0.8″. There should be 7 rows of holes each way so that one hole lines up in the center.
A Nylon 4-40 screw and nut to fasten the transformer to the board.
Four (4) machined-type IC socket pins or something similar to use as terminals.
Wind the primary:
Slip a piece of sleeving over the start of the primary wire and position the sleeving so it extends about 1/2 turn inside the bobbin on the left side.
Wrap exactly 9 turns of this wire clockwise around the bobbin, left to right. The wires should enter and exit on the same angular position (slot) of the bobbin on opposite sides.
Slip another piece of sleeving over the wire end exiting the bobbin so that it too is about 1/2 turn inside the bobbin.
Wrap 1.5 to 2 turns of tape tightly over the primary winding to secure and insulate it.
Wind the secondary:
Strip 1/8″ or so from the end of a 2″ piece of wire-wrap wire and solder the start of the wire for the secondary winding to it. Make sure the insulation on the fine magnet wire has been removed – usually just heating it while soldering will do this. Leave an inch or so of the magnet wire extending from the connection so that continuity can be confirmed with a multimeter, then snip it off. Install this in the opposite slot of the bobbin also on the left side with about 1/4″ of insulation inside the bobbin against the side and separated from the primary. Leave a little slack in the fine secondary wire so that slight motion won’t break it. Add a small piece of tape to protect and insulate this connection.
Using your coil winding machine (you do have one, correct?), build up the secondary in layers of about 50 to 75 turns in a counter-clockwise direction (bobbin being rotated clockwise). A single layer of wire won’t fit in the 1/8″ or so available (in the 18×11 mm core bobbin) so there will have to be some overlap. But, do this several times across the layer so that any given wire won’t be next to one with a much different voltage. In other words, wind a few turns and back up so that there will in essence be multiple sub-windings of 5 or 10 turns, repeated several times across the layer. Keep the wire at least 1/32″ away from either edge of the bobbin.
After each full layer or wire, add just over 1 layer of insulating tape making sure it covers the entire width of the bobbin. There should be just enough overlap to assure there is at least 1 layer of insulation but not much more as excessive tape will end up taking up too much space.The entire 450 turn winding will then require 6 to 9 full layers. Add another layer of insulating tape over the last winding layer leaving the wire end exposed.
Terminate the end of the secondary winding with another piece of thin wire by soldering as above. Confirm continuity with a multimeter. For the 450 turn secondary, the resistance should be about 60 ohms. Add a piece of thicker sleeving over this at the HV end if space is available. Else, use some bits of tape to insulate the wirewrap wire lead from the core and exposed inner layers that it may come near as it exits out the side of the bobbin. Add another layer of tape to secure the lead in place.
Add several more layers of insulating tape to complete the bobbin assembly.
Prepare the mounting board:
Widen the center hole to 7/64″ to accommodate a 4-40 nylon screw.
Widen the holes at the 4 corners of the board to accept the 4 IC socket pins (if used) as a press-fit or glue them in place with 5 minute Epoxy or SuperGlue.
Final assembly:
Install the ferrite pot core halves to the bobbin taking care not to crunch any of the wires. Orient it so that the primary and secondary leads are conveniently located with respect to the 4 pins, e.g., primary start: bottom left; primary end: top left, secondary start: bottom right; and primary end: top right.
Use the nylon 4-40 screw and nut to *gently* secure the transformer to the mounting board. The head of the 4-40 screw should be underneath the board. Don’t over-tighten or it may crack the core, especially if it has an air-gap in the middle.
Carefully remove the insulation from the ends of the wires. The secondary wires will still be fragile even with the wirewrap wire terminations. For the magnet wire, the easiest way to remove the insulation is to burn it off with a match or hot soldering iron and then clean with fine sandpaper.
Push the wires into their respective socket pins. (The wirewrap wires are too thin to be secure but they will make adequate contact for testing.)
Use a multimeter to confirm continuity of the primary (close to 0 ohms) and secondary (about 50 to 75 ohms).
Testing:
Install the transformer in you HV Module. Attach a He-Ne laser tube and ballast resistor.
Power up on an variable DC power supply and check for reliable starting and stable operation. Adjust the core gap if needed. A smaller gap may result in more operating power available at a given input voltage. A larger gap will result in attempts to start on a lower input voltage. Somewhere around 0.005″ is probably a good compromise.
After testing the transformer (and adjusting the core gap if needed), use some adhesive to secure the pot core sections and to protect the transformer leads. Solder the leads into the socket pins.
The final result is shown on an adapter below:
Photo of SG-HM2 HVM2-1 Transformer being Tested in IC-HI1
The instructions for winding the HVM2-5 transformer are similar except for the dimensions, wire sizes and lengths, and number of turns for the primary and secondary:
Differences in parts list for T501 of HVM2-5 compared to T101 of HVM2-1:
26×16 mm (2616) ferrite pot core with a small air-gap (no more than 0.005″) or no air-gap, and a single section bobbin.
Approximately 2.0 feet of #26 magnet wire for the primary (12 turns wound first) and approximately 75 to 120 feet of #40 magnet wire for the secondary (600 or 900 turns wound on top of the primary).
A piece of Perf. board with holes on 0.1″ centers, 1.0″x1.0″. There should be 9 rows of holes each way so that one hole lines up in the center.
A Nylon 10-32 screw and nut to fasten the transformer to the board.
Since the peak voltage on the HVM2-5 secondary may be 2 to 3 times higher than for HVM2-1, extra insulation and clearances will be required on the secondary.
SG-HM2 Printed Circuit Board Layout
A printed circuit board layout is also available. The Control Module is 2″x1.2″. The HV Modules are 3.6″x1.2″ and 4.5″x1.8″ for the 1 mW (HVM2-1) and 5 mW (HVM2-5), respectively. The Control and HV Modules are connected by a 2 pin cable for transformer drive and a 3 pin cable for current sensing from the laser tube. The two boards can easily be merged if desired.
The layout of the 3 PCBs may be viewed as a GIF file (draft quality) as below:
Sam’s Modular He-Ne Laser Power Supply 2 PCB Layout
.
A complete PCB artwork package for SG-HM2 (all PCBs on one sheet) may be downloaded in standard (full resolution 1:1) Gerber PCB format (zipped) as [download id=”5612″]
The Gerber files include the component side copper, soldermask, and silkscreen; solder side copper and soldermask, and drill control artwork. The original printed circuit board CAD files and netlist (in Tango PCB format) are provided so that the circuit layout can be modified or imported to another system if desired. The text file ‘sghm2.doc’ (in sghm2grb.zip) describes the file contents in more detail.
Note: The netlist does NOT include wiring for the HVM2-5 HV Module. Also, part numbers on the HVM2-5 PCB actually begin with a “5” instead of a “1” since Tango PCB will not allow duplicate part numbers on the same layout.
The term laser stands for “Light Amplification by Stimulated Emission of Radiation”. However, lasers as most of us know them, are actually sources of light – oscillators rather than amplifiers. (Although laser amplifiers do exist in applications as diverse as fibre optic communications repeaters and multi-gigawatt laser arrays for inertial fusion research.) Of course, all oscillators – electronic, mechanical, or optical – are constructed by adding the proper kind of positive feedback to an amplifier.
All materials exhibit what is known as a bright line spectra when excited in some way. In the case of gases, this can be an electric current or (RF) radio frequency field. In the case of solids like ruby, a bright pulse of light from a xenon flash lamp can be used. The spectral lines are the result of spontaneous transitions of electrons in the material’s atoms from higher to lower energy levels. A similar set of dark lines result in broad band light that is passed through the material due to the absorption of energy at specific wavelengths. Only a discrete set of energy levels and thus a discrete set of transitions are permitted based on quantum mechanical principles (well beyond the scope of this document, thankfully!). The entire science of spectroscopy is based on fact that every material has a unique spectral signature.
The HeNe laser depends on energy level transitions in the neon gas. In the case of neon, there are dozens if not hundreds of possible wavelength lines of light in this spectrum. Some of the stronger ones are near the 632.8 nm line of the common red HeNe laser – but this is not the strongest:
The strongest red line is 640.2 nm. There is one almost as strong at 633.4 nm. That’s right, 633.4 nm and not 632.8 nm. The 632.8 nm one is quite weak in an ordinary neon spectrum, due to the high energy levels in the neon atom used to produce this line.
Bright Line Spectra of Helium and Neon
(The relative brightnesses of these don’t appear to be accurate though at present.) More detailed spectra can be found at the: Laser Stars – Spectra of Gas Discharges Page. And there is a photo of an actual HeNe laser discharge spectra with very detailed annotation of most of the visible lines in: Skywise’s Lasers and Optics Reference Section. The comment about the output wavelength not being one of the stronger lines is valid for most lasers as if it were, that energy level would be depleted by spontaneous emission, which isn’t what is wanted!
There are also many infra-red lines and some in the orange, yellow, and green regions of the spectrum as well.
The helium does not participate in the lasing (light emitting) process but is used to couple energy from the discharge to the neon through collisions with the neon atoms. This pumps up the neon to a higher energy state resulting in a population inversion meaning that more atoms in the higher energy state than the ground or equilibrium state.
Helium-Neon Excitation and Lasing Process
It turns out that the upper level of the transition that produces he 632.8 nm line (as well as the other visible He-Ne lasing lines) has an energy level that almost exactly matches the energy level of helium’s lowest excited state. The vibrational coupling between these two states s highly efficient.
A DC electrical discharge or RF field excites He atoms to the 2s energy state.
Collisions efficiently transfer energy raising Ne atoms to the 3s2 energy state. Note the relatively high energy levels involved – over 20 eV for the upper energy states.
Stimulated emission (lasing) causes a drop to one of several Ne 2p states.
Radiative decay (spontaneous emission) drops Ne from the terminal lasing state to the 1s state.
Collisions with the tube wall drops Ne from the 1s state to the Ground state.
For 632.8 nm, one mirror will be highly reflective at 632.8 nm (typically 99.9 percent or better). This is the “High Reflector” or HR. The other mirror will have a typical reflectivity of 99 percent at 632.8 nm. This is the “Output Coupler” or OC from which the useful beam emerges. In order to suppress lasing at other wavelengths, the mirrors will generally be designed to have lower reflectivity there. (Though given the low gain of all the He-Ne lasing lines, especially the “other colour” lines, this isn’t much of a problem at 632.8 nm.)
The rate at which (4) and (5) can take place ultimately limits the power of a He-Ne laser and explains why increasing the excitation (1) actually reduces power above some optimum level.
The gas mixture must be mostly helium (typically 5:1 to 10:1, He:Ne), so that helium atoms can be excited. The excited helium atoms collide with neon atoms, exciting some of them to the state from which they can radiate at 632.8 nm. Without helium, the neon atoms would be excited mostly to lower excited states responsible for non-laser lines. And the gas mixture has to be super pure as any contamination results in excitation of rogue atoms (like H, O, and N) to lower energy states where all that will happen is that they will glow like a poorly made neon sign.
A neon laser with no helium can be constructed but it is much more difficult and the output power will be much lower without this means of energy coupling. Therefore, a He-Ne laser that has lost enough of its helium (e.g., due to diffusion through the seals or glass) will most likely not lase at all since the pumping efficiency will be too low.
However, pure neon will lase superradiantly in a narrow tube (e.g., 40 cm long x 1 mm ID) in the orange (611.9 nm) and yellow (594.1 nm) with orange being the strongest. Superradiant means that no mirrors are used although the addition of a Fabry-Perot cavity (e.g., mirrors!) does improve the lateral coherence and output power. This from a paper entitled: “Super-Radiant Yellow and Orange Laser Transitions in Pure Neon” by H. G. Heard and J. Peterson, Proceedings of the IEEE, Oct. 1964, vol. #52, page #1258. The authors used a pulsed high voltage power supply for excitation (they didn’t attempt to operate the system in CW mode but speculate that it should be possible).
(From: Steve Roberts.)
“Various IR lines will lase in pure neon, and even the 632.8 nm line will lase, but it takes a different pressure and a much longer tube. 632.8 nm also shows up with neon-argon, neon-oxygen, and other mixtures. Just about everything on the periodic table will lase, given the right excitation. See “The CRC Handbook of Lasers” or one of the many compendiums of lasing lines available in larger libraries. These are usually 4 volume sets of books the size of a big phone book just full of every published journal article on lasing action observed. It’s a shame that out of these many thousands and thousands of lasing lines, only 7 different types of lasers are under mainstream use.
There are many possible transitions in neon from the excited state to a lower energy state that can result in laser action. (Only the three found most commonly in commercial He-Ne lasers are shown in the diagram, above.) The most important (from our perspective) are listed below:
Output Wavelength is approximate. In addition to slight variations due to actual lasing conditions (single mode, multimode, doppler broadening, etc.), some references don’t even agree on some of these values to the 4 or 5 significant digits shown.
He-Ne Laser Name is what would be likely to be found in a catalogue or spec. sheet. All those that have an entry in this column are readily available commercially.
Perceived Beam Colour is how it would appear when spread out and projected onto a white screen. Of course, depending on the revision level of your eyeballs, this may vary someone from individual to individual. 🙂
Lasing Transition uses the so-called “Paschen Notation” and indicates the electron shells of the neon atom energy states between which the stimulated emission takes place.
Typical Gain (%/m) shows the percent increase in light intensity due to stimulated emission at this wavelength inside the laser tube’s bore. This is the single pass gain and will be affected by tube construction, gas fill ratio and pressure, discharge current, and other factors. The first column is from various sources. The second column is from Hecht, “The Laser Guide Book”. However, a newer text: Mark Csele, “Fundamentals of light sources and lasers” (ISBN 0-471-47660-9, Wiley-Interscience, 2004) lists the typical gain as 1.2 to 1.5 at 633 nm. And measurements by myself and others seem to show that this slightly higher value may be more accurate, at least under some conditions.
Gain at 1,523 nm may be similar to that of 543.5 nm – about 0.5%/m. Gain at 3,391 nm is by far the highest of any – possibly more than 100%/m. I know of one particular He-Ne laser operating at this wavelength that used an OC with a reflectivity of only 60% with a bore less than 0.4m long. Yet, the output power of the largest 3,391 nm commercial He-Ne laser is still only a fraction of that at 632.8 nm.
Maximum Power shows the highest output power lasers commercially available in a TEM00 beam for each wavelength. The first number is rated power while the number in () is achieved output power for a particularly lively tube. Lasers operating with multiple (spatial) modes (non-TEM00) may have somewhat higher output power.
The most common and least expensive He-Ne laser by far is the one called ‘red’ at 632.8 nm. However, all the others with named ‘colours’ are readily available with green probably being second in popularity due to its increased visibility near the peak of the of the human eye’s response curve (555 nm). And, with some He-Ne lasers with insufficiently narrow-band mirrors, you may see 640 nm red as a weak output along with the normal 632.8 nm red because of its relatively high gain. There are even tunable He-Ne lasers capable of outputting any one of up to 5 or more wavelengths by turning a knob. While we normally don’t think of a He-Ne laser as producing an infra-red (and invisible) beam, the IR spectral lines are quite strong – in some cases more so than the visible lines – and He-Ne lasers at all of these wavelengths (and others) are commercially available.
The first gas laser developed in the early 1960s was an HeNe laser operated at 1,152.3 nm. In fact, the IR line at 3,391.3 is so strong that a HeNe laser operating in ‘superradiant’ mode – without mirrors – can be built for this wavelength and commercial 3,391.3 nm HeNe lasers may use an output mirror with a reflectivity of less than 50 percent. Contrast this to the most common 632.8 nm (red) He-Ne laser which requires very high reflectivity mirrors (often over 99 percent) and extreme care to minimize losses or it won’t function at all.
When the He-Ne gas mixture is excited, all possible transitions occur at a steady rate due to spontaneous emission. However, most of the photons are emitted with a random direction and phase, and only light at one of these wavelengths is usually desired in the laser beam. At this point, we have basically the glow of a neon sign with some helium mixed in!
To turn spontaneous emission into the stimulated emission of a laser, a way of selectively amplifying one of these wavelengths is needed and providing feedback so that a sustained oscillation can be maintained. This may be accomplished by locating the discharge between a pair of mirrors forming what is known as a Fabry-Perot resonator or cavity. One mirror is totally reflective and the other is partially reflective to allow the beam to escape.
One mirror may be perfectly flat (planar) or both may be spherical with a typical Radius of Curvature (RoC = 2 * focal length) slightly longer that the length of the cavity (L) or even longer. Where both mirrors have an RoC equal to L, the configuration is called ‘confocal’ (the focii of the two mirrors are coincident), but it is marginall stable, so the RoCs will be at least slightly longer than L. A cavity with two planar mirrors is borderline stable and essentially impossible to align or maintain in alignment over time, so it is never used in He-Ne lasers (but is in some pulsed solid state and other lasers). Curved mirrors result in an easier to align more stable configuration but are more expensive than planar mirrors to manufacture and are not as efficient since less of the lasing medium volume is used (think of the shape of the beam inside the bore). The confocal arrangement represents a good compromise between a true spherical cavity (r = 1/2 * L) which is easiest to align but least efficient and one with plane parallel mirrors (f = infinity) which is most difficult to align but uses the maximum volume of the lasing medium. (But as noted above, for a practical confocal cavity, RoCs slightly longer than L are used to assure stability.)
These mirrors are normally made so that the two mirrors together has peak reflectivity at the desired laser wavelength. (For technical reasons, it’s sometimes easier to make mirrors like cliffs – high reflectivity that drops to low reflectivity at a given wavelength, in either direction – than to guarantee a particular peak reflectivity.) When a spontaneously emitted photon resulting from the transition corresponding to this peak happens to be emitted in a direction nearly parallel to the long axis of the tube, it stimulates additional transitions in excited atoms. These atoms then emit photons at the same wavelength and with the same direction and phase. The photons bounce back and forth in the resonant cavity stimulating additional photon emission. Each pass through the discharge results in amplification – gain – of the light. If the gain due to stimulated emission exceeds the losses due to imperfect mirrors and other factors, the intensity builds up and a coherent beam of laser light emerges via the partially reflecting mirror at one end. With the proper discharge power, the excitation and emission exactly balance and a maximum strength continuous stable output beam is produced.
Spontaneously emitted photons that are not parallel to the axis of the tube will miss the mirrors entirely or will result in stimulated photons that are reflected only a couple of times before they are lost out the sides of the tube. Those that occur at the wrong wavelength will be reflected poorly if at all by the mirrors and any light at these wavelengths will die out as well.
Summary of the He-Ne Lasing Process
The He-Ne laser is a 4 level laser (see the table above for the specific energy level transitions for the common wavelengths):
Collisions with excited helium atoms raise the neon atoms from level 1 (ground state) to level 4 (which is the 3s state for visible wavelengths).
The visible lasing transitions are from the 3s to various 2p states (depending on wavelength) or level 3.
The neon atoms then decay rapidly to the 1s state or level 2.
Return to the ground state or level 1 is aided by collisions with the He-Ne laser tube’s bore/capillary walls.
For most common IR wavelengths, level 4 is the 2s state and level 3 are various 2p states. However, the very strong 3.93 um line originates from the 3s state just like the visible wavelengths – and is the reason it competes with them in long He-Ne tubes and must be suppressed to optimize visible output.
The ‘s’ states of neon have about 10 times the lifetime of the ‘p’ states and thus support the population inversion since a neon atom can hang around in the 2s state long enough for stimulated emission to take place. However, the limiting effect is the decay back to level 1, the ground state, since the 1s state also has a long lifetime. Thus, one wants a narrow bore to facilitate collisions with its walls. But this results in increased losses. Modern He-Ne lasers operate at a compromise among several contradictory requirements which is one reason that their maximum output power is relatively low.
Approximate Reference Values for the Red (632.8 nm) He-Ne Laser
Here are some common values and relationships that may come in handy when doing calculations. These are not the most exact since they may depend on other factors like the precise gas-fill and environmental conditions but are generally good enough for government work. 🙂
Wavelength: 632.8 nm.
Optical Frequency: 474 THz.
Gain Bandwidth of Neon: 1.6 GHz or 2.136 nm.
1 nm at 632.8 nm: 749 GHz.
1 GHz at 632.8 nm: 1.335 nm.
Longitudinal Modes of Operation
The physical dimensions of the Fabry-Perot resonator impose some additional constraints on the resulting beam characteristics.
While it is commonly believed that the 632.8 nm (for example) transition is a sharp peak, it is actually a Gaussian – bell shaped – curve. (Strictly speaking, it is something called a “Voigt distribution” which is a combination of Gaussian and Lorentzian – but that’s for the advanced course. Gaussian is close enough for this discussion since the discrepancy only shows up way out in the tails of the curve.) In order for a linear or (Fabry-Perot) cavity to resonate strongly, a standing wave pattern must exist. This will only occur when an integral number of half wavelengths fit between the two mirrors. This restricts possible axial or longitudinal modes of oscillation to:
L * 2 c * n
W = --------- or F = ---------
n L * 2
Where:
L is the distance between the mirrors (m).
W denotes the possible wavelengths of oscillation (m).
n is a large integer (order of 948,000 for W around 632.8 nm, L = .3 m).
F denotes the possible frequencies of oscillation (Hz).
c is the speed of light (approximately 300 million m/s).
The laser will not operate with just any wavelength – it must satisfy this equation. Therefore, the output will not usually be a single peak at 632.8 nm but a series of peaks around 632.8 nm spaced c/(2*L) Hz apart. Longer cavities result in closer mode spacing and a larger number of modes since the gain won’t fall off as rapidly as the modes move away from the peak. For example, a cavity length of 150 mm results in a longitudinal mode spacing of about 1 GHz; L = 300 mm results in about 500 MHz. The strongest spectral lines in the output will be nearest the combined peak of the lasing medium and mirror reflectivity but many others will still be present. This is called multimode operation.
Think of the vibrating string of a violin or piano. Being fixed at both ends, it can only sustain oscillations where an integer number of cycles fits on the string. In the case of a string, n can equal 1 (fundamental) and 2, 3, 4, 5 (harmonics or overtones). Due to the tension and stiffness of the string, only small integer values for n are present with a significant amplitude. For a He-Ne laser, the distribution of the selected neon spectral line and shape of the reflectivity function of the mirrors with respect to wavelength determine which values of n are present and the effective gain of each one. And n will be much greater than 1!
For a typical HeNe laser tube, possible values of n will form a series of very large numbers like 948,161, 948,162, 948,163, 948,164,…. rather than 1, 2, 3, 4. 🙂 A typical gain function showing the emission curve of the excited neon multiplied by the mode structure of the Fabry-Perot resonator and the reflectivity curve of the mirrors may look something like the following:
Or, see the following for some slightly more aesthetically pleasing diagrams of the longitudinal modes of random polarized He-Ne lasers. 🙂
Longitudinal Modes of Typical Random Polarized 1 mW He-Ne LaserLongitudinal Modes of Typical Random Polarized 3 mW He-Ne LaserLongitudinal Modes of Typical Random Polarized 8 mW He-Ne LaserLongitudinal Modes of Typical Random Polarized 30 mW He-Ne Laser
Mode Sweep
Since the mode locations are determined by the physical spacing of the mirrors, as the tube warms up and expands, these spectral line frequencies are going to drift downward (toward longer wavelengths). However, since the reflectivity of the mirrors as a function of wavelength is quite broad (for all practical purposes, a constant), new lines will fill in from above and the overall shape of the function doesn’t change.
In the diagrams above, a single arbitrary mode position is shown, but for well behaved lasers, the lasing lines will move smoothly through the gain curve as the laser warms up. This is called by various names including “mode sweep” and “mode cycling”. While present with most lasers, the effects are quite striking with low to medium power He-Ne lasers due to their relatively narrow neon gain bandwidth (which is only a small multiple of the longitudinal mode spacing in low to medium power He-Ne lasers), the rather fortuitous phenomenon that for red (633 nm) He-Ne lasers at least, adjacent longitudinal modes tend to be orthogonally polarized, and nearly ideal behaviour in other respects with the Physics mostly cooperating. (Murphy has seen the LASER DANGER signs and stays away!) Much more on all this below (except perhaps for Murphy).
In the nice diagram above 🙂 of the 8 mW laser, there are 5 longitudinal cavity modes that see gain above the lasing threshold (the right-most just barely). These become lasing modes (red and blue) producing a total output power of somewhat over 8 mW in this specific example. For the 30 mW laser, there are twice as many lasing modes one half the distance apart, and each mode has more power. Interestingly, adjacent modes in a so-called “random polarized” red (632.8 nm) He-Ne laser are almost always orthogonally polarized, with the polarization axes fixed relative to the tube. (Here, one of them is arbitrarily referenced as 0 degrees, more on this later). As the distance between the mirrors is increased, the number of oscillating modes increases as well, though the actual power in each mode increases only slightly.
Mode Sweep of 8 mW Random Polarized He-Ne Laser
One complete cycle (red or blue) represents a change in cavity length of one wavelength (at 633 nm) and a change in optical frequency of 2 times the mode spacing of c/2L. The additional factor of 2 arises because the adjacent modes of the red (633 nm) HeNe are orthogonally polarized. This is not true with most other lasers and even HeNe lasers at other wavelengths. Note that while the profile of the mode sweep is affected by the neon gain curve, the period is NOT directly related to it, only c/2L.
However, note that as HeNe lasers get longer, mode competition results in greater and greater instability, so don’t expect to see a nice orderly march with a Spectra-Physics 127 (39 inch cavity). In fact while the envelope of the modes will generally follow the gain curve, each mode will be jumping up and down in a quasi-chaotic dance! Instability may appear in the display of a Scanning Fabry-Perot Interferometer (SFPI) when viewing the longitudinal modes of a 633 nm HeNe with tubes rated at 7 to 10 mW. 5 mW lasers are usually quite clean while 35 mW lasers can be a real mess.
For very short HeNe tubes, the width of the gain curve may be similar to or even narrower than the spacing between modes. With those, the output power will become very low or go to zero during portions of the mode sweep. Very few HeNe lasers were produced with cavity lengths where this would be an issue since maximum output power would be very low. The only one I know of was the Spectra-Physics 119 stabilized laser with a 100 mm cavity length (mode spacing of 1.5 GHz). The very short cavity was required to provide special characteristics for this system.
In fact, it’s often possible to go so far as to identify a specific manufacturer and even model of a HeNe laser tube based solely on the plots of its polarized mode sweep, providing a sort of “fingerprint” for lasers. 🙂 For example, the type of tube installed in a Zygo or Teletrac/Axsys stabilized laser can be determined without opening the case!
He-Ne Laser Mode Sweep Fingerprints
These tubes are all physically similar yet have dramatically different mode sweep plots. And, it’s often possible to determine key information about the health of a laser tube by comparing its mode sweep with that of a new one. Over most of its life, the general shape will remain the same, but as the power declines, in addition to the total height of the plot decreasing, the amplitude of the variation (i.e., the AC component) relative to the total will increase. However, near end-of-life when power is way down and fewer modes are oscillating, the distinctions will tend to disappear.
For very long tubes like the 30 mW one in the example above where there are many longitudinal modes, the actual appearance of mode sweep may be rather chaotic as power shifts among the modes in a random dance. When I first observed this behaviour with a Melles Griot 05-LHP-928 (35 mW) He-Ne producing over 40 mW, I thought it might have been defective in some way despite the high power. But two other healthy samples behaved in a similar manner. So, don’t expect to see nice well behaved marching modes for these high power lasers. There is often a hint of instability even in shorter tubes though it may be subtle – a few percent variation in the peak amplitudes not attributable to other causes like normal movement under the gain curve or power supply ripple.
The effects of mode sweep are more dramatic with short low pressure carbon dioxide (CO2) lasers because for a given resonator length, the ratio of wavelengths (10,600 nm for CO2 compared to 632.8 nm for He-Ne means that the longitudinal mode spacing is 16.7 times larger). In these cases, the laser output will turn on and off as it heats up and the distance between the mirrors increases due to thermal expansion. For this to happen in a 632.8 nm He-Ne would require the tube to be less than about 75 mm (3 inches) in length.
A linearly polarized He-Ne laser would have the same longitudinal mode spacing, but all the lasing modes would have the same polarization orientation (red or blue) as shown in the diagrams and animations, above.
Longitudinal Modes of Typical Linearly Polarized 8 mW He-Ne Laser
So, someone with red/blue color-blindness (if there is such a thing) would see the diagrams for all them as being linearly polarized!
A label on the polarized laser will indicate the plane or orientation of polarization of the output beam. For a random polarized He-Ne laser, a polarizer oriented at 45 degrees with respect to the plane of polarization would produce an output with respect to mode sweep that is similar to that of a linearly polarized laser, except that even with an ideal polarizer, the output power would be cut in half.
Now for some actual numbers: The Doppler-broadened gain curve for neon in a red (632.8 nm) He-Ne laser has a Full Width Half Maximum (FWHM, where the gain is at least half the peak value) on the order of 1.5 or 1.6 GHz. So, for a 500 mm long (high gain) tube with its mode spacing of about 300 MHz (similar to what is depicted above), 5 or 6 lines may be active simultaneously and oscillation will always be sustained (though there would be some variation in output power as various modes sweep by and compete for attention). However, for a little 10 cm tube, the mode spacing is about 1,500 MHz. If this laser were to be really unlucky (i.e., the distance between mirrors was exactly wrong) the cavity resonance might not fall in a portion of the gain curve with enough gain to even lase at all! Or, as the tube heats up and expands, the laser would go on and off. There are very few commercial He-Ne laser tubes that short. It is possible to widen the gain curve somewhat by using a mixture of neon isotopes (Ne20 and Ne22) rather than a single one since the location of their peak gain differ slightly. This would allow a smaller cavity to lase reliably and/or reduce amplitude variations from mode sweeping in all size He-Ne lasers. The actual lasing threshold will also determine the effective width of the neon gain curve over which lasing occurs, so it may be wider than the FWHM.
A high speed silicon photodiode and oscilloscope or RF spectrum analyzer can be used to view the frequencies associated with the longitudinal modes of a He-Ne laser. The clearest demonstration would be using a short tube where at most two longitudinal modes are active. This will result in a single difference frequency when both modes are lasing. A polarized tube is best as it forces both modes to have the same polarization as a photodiode will not detect the difference frequencies for orthogonally polarized modes. Adjacent longitudinal modes of random polarized tubes are almost always orthogonally polarized (for a 633 nm He-Ne at least). But, adding a polarizer at 45 degrees to the polarization axes can compensate for this with a slight loss in signal strength. Without a polarizer, the beat frequencies of a random polarized laser will tend to be at multiples of twice the mode spacing since only those modes with the same polarization orientation beat with each-other in the photodiode. (If measured very accurately, it will be seen that these frequencies will not generally be exactly at multiples of the mode spacing based on c/2L and will vary slightly during mode sweep. The is due to mode pulling or pushing effects, reserved for the advanced course!)
Passive stabilization (using a structure made of a combination of materials with a very low or net zero coefficient of thermal expansion or a temperature regulator) or active stabilization (using optical feedback and piezo or magnetic actuators to move the mirrors, or a heating element to control the length of the entire structure) can compensate for these effects. However, the added expense is only justified for high performance lab quality lasers or industrial applications like interferometric based precision measurement systems – you won’t find these enhancements on the common cheap He-Ne tubes found in barcode scanners.
Thus, a typical HeNe laser is not monochromatic though the effective spectral line width is very narrow compared to common light sources. Additional effort is needed to produce a truly monochromatic source operating in a single longitudinal mode. One way to do this is to introduce another adjustable resonator called an etalon into the beam path inside the cavity. A typical etalon consists of a clear optical plate with parallel surfaces. Partial reflections from its two surfaces make it act as a weak Fabry-Perot resonator with a set of modes of its own. Then, only modes which have the same optical frequency in both resonators will produce enough gain to sustain laser output.
The longitudinal mode structure of an optional intra-cavity etalon might look like the following (not to scale):
Notice that since the distance between the two surfaces of the etalon is much less than the distance between the main mirrors, the peaks are much further apart (even more so than shown). (The etalon’s index of refraction also gets involved here but that is just a detail.) By adjusting the angle of the etalon, its peaks will shift left or right (since the effective distance between its two surfaces changes) so that one spectral line can be selected to be coincident with a peak in the main gain function. This will result in single mode operation. The side peaks of the etalon (-1, +1 and beyond) will may coincide with weak peaks in the main gain function shown above but their combined amplitude (product) is insufficient to contribute to laser output.
Intracavity Etalon for Line Selection in a Single Mode He-Ne Laser
This example is based on the same 30 mW laser as in the diagram in the section: Longitudinal Modes of Operation. Adding an etalon inside the cavity introduces an additional loss function with peaks every GHz or so. (Note that such an etalon would be about 15 cm long, so the plasma tube for this laser needs to be short enough to allow for that much space between it and one of the mirrors, but that’s just a detail!) Only where the product of the original net (round trip) gain and the etalon transmission is above one will the laser lase. For this example, there is only place where a cavity mode and etalon mode coincide – just to the left of centre of the neon gain curve peak. And, now that there is only a single mode oscillating, it will have an output power of over 15 mW, rather than the ~3 mW or less in each of several multiple modes. There is always some loss in adding an etalon, so the full 30+ mW originally present isn’t usually possible, though the ~50 percent reduction in output power shown here may be excessive.
The standard, small He-Ne laser normally lases on only one transition, the well known red line at about 632.8 nm.
The He-Ne gain curve is inhomogeneously Doppler-broadened with a gain bandwidth of around 1.5 GHz (at 632.8 nm). (The width of the Doppler-broadened gain curve depends on the lasing wavelength. At 3,391 nm, it is only about 310 MHz.) For a typical laser, say 30 cm long, the axial modes are separated by about 500 MHz. Typically, two or three axial modes are above threshold, in fact as the laser length drifts you typically get two modes (placed symmetrically about line centre) or three modes (one near centre, one either side) cyclically, and a slow periodic power drift results. Shorter lasers, less modes, more power variation unless stabilized. But it needs a huge He-Ne laser to get ten modes, and since they are closer of course they still only spread over the 1.5 GHz line width.
Most He-Ne lasers which do not contain a Brewster window or internal Brewster plate are randomly polarized; adjacent modes tend to be of alternating orthogonal polarizations. (Note that this is not necessarily true for He-Ne lasers operating at wavelengths other than 632.8 nm and/or can be overridden with a transverse magnetic field, see below.
Some frequency stabilized HeNe lasers are NOT single mode, but have two, and the stabilization acts to keep them symmetrical about line centre – i.e., both are half a mode spacing off line centre. A polariser will then split off one of them or a polarizing beamsplitter will separate the two.
(From: Sam.)
The party line is that adjacent modes in a He-Ne laser will be of orthogonal polarization. However, I’ve seen samples of small (e.g., 5 or 6 inch) random polarized tubes only supporting 2 active modes where this is not the case – they output a polarized beam that remains stable with warmup and in any case, applying a strong transverse magnetic field will override the natural polarization. So, it’s not a strong effect. Only if everything inside the tube is reasonably symmetric, will the modes alternate. Modes may also remain one polarization as they move through part of the gain curve and then abruptly – and repeatably – flip polarization. But the majority of tubes are well behaved in this regard.
Resonator Length and Mode Hopping
Here are some additional comments that address the common fear of the novice laser enthusiast that the resonator length has to be stabilized to the nm or else the laser will blink off.
(Portions from: Steve Roberts.)
Flames expected, as I’m ignoring some of the physics and am trying to explain some of this based on what I observe, aligning and adjusting cavities on He-Ne and argon ion lasers as part of repairing them. Anyone who only goes by the textbooks has missed out on the fun, obviously having never had to work on an external mirror resonator. It can be quite a education!
Due to the complex number of possible paths down the typical gain medium, you will see lasing as long as the mirrors are reasonably aligned. The cavity spacing is not always that critical and will change anyway as the mirror mounts are adjusted (there will always be some unavoidable translation even if only the angle is supposed to be changed). No, lasers don’t really flash on and off in interferometric nulls as you translate the mirrors – they instead change lasing modes. They will find another workable path. You will in some cases see this as a change in intensity but it is more properly observed on a optical spectrum analyzer as a change in mode beating. Eventually you can translate them far apart enough that lasing ceases, but this is a function of your optics not the resonator expansion.
I have seen what you fear in some cases by adding a third mirror to a two mirror cavity with a low gain medium such as He-Ne where the third mirror can be positioned in such a way to kill many possible modes. This usually occurs when I use a He-Ne laser to align an argon laser’s mirrors and the HeNe laser will flicker from back reflections. See the section: External Mirror Laser Cleaning and Alignment Techniques. But unless you have a extremely unstable resonator design, translation will just cause mode hopping, this becomes important on a frequency stabilized or mode locked laser if you have a precision lab application. Otherwise, most commercial lasers are not length stabilized in the least. There are equations and techniques for determining if you have a stable optical design – stable in this case meaning it will support lasing over a broad range of transverse and longitudinal modes. For examples see any text by A. E. Siegman or Koechner. If your library doesn’t have any similar texts, find a book on microwave waveguides. It might aid you in visualizing what is going on.
Either an intracavity etalon or active stabilization systems are usually used on single frequency systems anyway, by either translating the mirror on piezos or by pulling on mirror supports with small electromagnets, or in the case of smaller units, heaters to change the cavity length on internal mirror tubes. An etalon is basically a precision flat glass plate in the lasing path between the mirrors, its length is changed by a oven and it acts as a mode filter.
Length stabilization to the 50 or 100 nm you might have expected to be needed would be gross overkill anyhow, and would be impossible to achieve in practice by stabilizing the resonator alone. Depending on the end use of the product, most lasers are simply built with a low expansion resonator of graphite composite or Invar, although in many products a simple aluminium block or L shape is used, a few rare cases use rods made of two different materials designed to compensate by one short high expansion rod moving the mirror mount in opposition to the main expansion. A small fraction of a millimeter is a more reasonable specification.
The basic idea, that the laser can only work at the frequencies where an integral number of half waves fit in the cavity, is perfectly correct. The separation between adjacent modes is just 1/(2*L) where L is the cavity length in cm. From this we get the separation in ‘wavenumbers’. One wavenumber is 30 GHz, so in more usual units it is just 30 GHz/(2*L). Or, to make it easy, in a 50 cm long laser the modes are 300 MHz apart. That is not very far optically.
The laser operates by some molecule, gas, ion in a crystal, etc. making a transition between two levels. But those levels are not perfectly ‘sharp’; we say they are ‘broadened’. The reason can be many things:
In a gas – Doppler (or temperature) broadening. The molecules move about randomly, and the light is Doppler shifted a random amount.
Collision (pressure) broadening. Collisions either relax or dephase the state – i.e., ‘mess it up’ and broaden it!
In a solid various things can happen, but for example in a glass different laser ions are in slightly different positions, and this causes them to have slightly different energies.
In any case no transition is *perfectly* sharp, the fact that it has a finite lifetime gives it a certain width, but this is not often the real limit, something else is usually more important.
These broadening mechanisms ‘blur out’ the line – we see optical gain over that *range* of frequencies, the gain bandwidth.
An example is carbon dioxide. The ‘natural width’ is very small, of order Hz. The Doppler width at 300 °K is about 70 MHz. The collision-broadened width increases about 7 MHz/Torr; so well below 10 Torr the width is Doppler-limited, ~70 MHz; above 10 Torr pressure broadened (e.g. ~700 MHz at 100 Torr).
If I take a typical He-Ne laser it might ‘blur’ out over a GHz or so – **more** than that 300 MHz mode spacing – so there are *always* two or thee modes within the ‘gain bandwidth’ and it will always lase. For a glass laser there might be *thousands* of modes, because the glass gain is very wide indeed.
But there *are* cases that go the other way. For carbon dioxide, at low pressure, the line is Doppler-broadened and about 70 MHz wide, much **LESS** than that 300 MHz mode spacing. So short carbon dioxide lasers really do turn on and off as the cavity length changes, and you have to ‘tune’ the cavity length to get a mode inside the gain width. This mainly happens with short, gas lasers in the infrared.
For a *high pressure* CO2 laser at 760 Torr (1atm), the line width is several GHz, much more than the mode spacing, so the effect disappears.
Observing Longitudinal Modes of a He-Ne Laser
Monitoring the output power of any He-Ne laser while it’s warming up will show a variation in output power due to longitudinal mode cycling. There is even a specification called the “Mode Sweep Percentage” which indicates how large the variation is in relation to the output power. For short tubes, the power fluctuations can approach 20 percent; for long tubes, they may be less than 2 percent.
There are many ways to actually “see” the modes of a laser including the use of an instrument called a Scanning Fabry-Perot Interferometer. However, for a short tube with only 1 or 2 modes, it’s quite straightforward to interpret what’s going on from the output power and polarization alone. All that’s needed is a photodiode and multimeter (or continuous reading laser power meter), and polarizing filter. (A lens from a pair of polarized Sun glasses or a photographic polarizing filter will do.) The power monitor can be set up in the output beam and the polarizing filter in the waste beam from the HR mirror. Alternatively, a non-polarizing beamsplitter can be used to provide the two beams. Adding a polarizing beamsplitter oriented so that it separates the two polarization orientations in one of the beams can simplify the interpretation of the polarization changes.
Changing the orientation of the polarizer will affect the amplitude of the intensity variations. For most red He-Ne lasers, the longitudinal modes will generally remain at two fixed orthogonal orientations, with adjacent modes usually being orthogonal to each other. As the tube heats and the cavity length increases, the modes march along under the gain curve with those at one end disappearing and new ones appearing at the other end as described above. But for well behaved tubes, they don’t flip polarization. When the polarizer is oriented at 45 degrees to the polarization axes of the tube, the reading will remain constant. When aligned with the polarization axes of the tube, the reading will fluctuate the most.
As a specific example, consider an He-Ne laser tube with a mirror spacing of 120 mm (about 4.75 inches, one of the shortest commercially available laser tubes). This corresponds to a mode spacing of about 1.25 GHz – rather close to the FWHM of 1.5 to 1.6 GHz for the neon gain bandwidth. With this tube, at most 2 modes will be oscillating at any given time. When the output power and polarization is monitored while the tube is warming up, a very distinctive behaviour will be observed. One might think that it should be a periodic variation in output power with a simple sinusoidal or similar characteristic. However, there will actually be two peaks for each cycle: A large one corresponding to when there is a single lasing mode at the centre of the gain curve, and a smaller one when there are two modes symmetric around the centre of the gain curve. For most tubes, the polarization of adjacent modes is orthogonal and will remain fixed with the mode. So, as the modes cycle under the gain curve successive large peaks will have opposite polarization. The small peaks will have equal components of both polarizations. Even though two modes are oscillating, the gain for each one is so much closer to the lasing threshold that their combined power is still lower than for the single mode at the peak of the gain curve. There may also be rather sudden changes in output power as modes on the tails of the gain curve come and go. However, for some tubes which are affectionately called “flippers”, the polarization of the modes will tend to suddenly change orientation as they move through the gain curve. This should also be apparent when viewing the beam through a polarizing filter.
Waveforms and RF Spectrum of Longitudinal Modes
While the beam from a healthy He-Ne laser appears by eye to be constant (except possibly for the normal variation in output power during mode sweep), only a single frequency laser has an output which is truly DC. With a high speed photodiode and basic test equipment, a great deal of information can be determined as a result of the interaction among the multiple longitudinal modes (also called axial modes) that are present in all but the shortest He-Ne lasers (or stabilized single frequency lasers). OK, well perhaps this requires some not quite so basic test equipment like a high speed oscilloscope and/or RF spectrum analyzer. 🙂 While these instruments may not be something you have handy, if you’re friendly with someone in a research lab at a local college or university, they may have may be able to help and then everyone could learn a lot from some simple experiments! 🙂
The photodiode (PD) must have a frequency response that extends beyond at least the longitudinal mode spacing of the laser. A fancy costly one may not be essential, only that the PD is quite small. One with a 1 GHz response is typically around 1 mm square, with the frequency response being roughly inversely proportional to area. Candidate PDs may turn up in all sorts of equipment, even old optical mice. The PD should be back-biased with a few volts to improve frequency response and set up to drive into a 50 ohm load terminating at the scope input. Basing the circuit on something like the Thorlabs DET10A would be perfect. (Search for this on the Thorlabs Web site. The spec sheet will have the circuit diagram.)
The first approach is to view the resulting mode beating on a fast oscilloscope. For a random polarized laser, a linear polarizer will be required in front of the PD oriented at 45 degrees to the principle polarization axes of the laser to force adjacent modes that are usually orthogonal to have the same polarization at the PD. The adjacent longitudinal modes will then produce a beat equal to their difference frequency. There will also be weaker beats from all other combinations of modes. Common HeNe lasers have a fundamental mode spacing of between 1.5 GHz (for a tiny 0.5 mW barcode scanner tube, around 10 cm between mirrors) and 161 MHz (for a 35 mW SP-127, around 95 cm between mirrors).
This laser is rated 5 mW with a mode spacing of 438 MHz (around 58 cm between mirrors). The waveforms were taken using a Thorlabs DET210 photodetector and my special edition laser-zapped Tektronix 2467 oscilloscope – formerly resident in the test department of a major laser manufacturer – evident from the 5 unsightly black blobs on the lower part of the screen where the CRT phosphor has been blown away by a high power pulsed laser! 🙂 While the fundamental can usually be seen, information about any higher difference frequencies is hard to interpret. And even this relatively fast scope doesn’t have much sensitivity beyond the 438 MHz fundamental. The screen shots are in no particular order in the montage other than to make the sequence somewhat pleasing. 🙂 This is further complicated by higher order effects like mode pulling, which slightly shift the positions of the modes based on their location relative to the centre of the neon gain curve. Thus, beyond confirming that the mode spacing is as expected, not much more can be easily determined and switching to the frequency domain will be more fruitful.
The output from the PD may also be applied to an RF spectrum analyzer, there will be significant power detected at the longitudinal mode spacing and its harmonics (hundreds of MHz or more) due to beating between longitudinal modes, as well as under 1 MHz (due to second order beats and mode pulling).
RF Spectra of Melles Griot 05-LHP-151 He-Ne Laser During Mode Sweep
The above image shows the primary beat signal for the same laser head using a Thorlabs DET210 1 GHz silicon photodetector and an HP 8590L RF spectrum analyzer. (As with the scope, for a random polarized laser, a polarizer would need to be placed in front of the PD oriented at 45 degrees to the polarization axes to detect adjacent beats.) The centre frequency is around 437 MHz and the span is 1 MHz. (Each box is 100 kHz.) (The spec’d value for the mode spacing of this laser is 438 MHz but it’s possible the spectrum analyzer is in need of calibration! Otherwise, complain to Melles Griot!) The sequence of screen shots show about half the full mode sweep cycle.
If there were no mode pulling, the display would always look like the one in the upper left corner (or even narrower) – a single frequency. However, the individual modes move slightly compared to the cavity resonances, so the spectrum spreads out as a function of the position of the modes on the neon gain curve.
Interestingly, the display remains where there is a single narrow peak for longer than could be accounted for based on the normal speed with which the frequencies are changing. In fact, it’s impossible to capture a situation where the peak is just slightly wider – it snaps from a FWHM of about 1/5 box (top left in composite photo) to approximately 1 box (top centre) and vice-versa. Nothing in between ever appears. This suggests that there is a self-locking process taking place, as mentioned in the previous section.
When set for a frequency range covering 0 to 200 kHz, peaks are present similar to what appears on the right side of those shown above. But a linear He-Ne laser power supply had to be used to avoid seeing the ripple frequency and harmonics of the switchmode brick overlaid on the beats! There are multiple strong beats at around 874 MHz as well, 2 times the mode spacing. They vary a way similar way as the others. This makes sense since there are are 3 longitudinal modes oscillating most of the time, with 4 modes for a brief period during mode sweep. The spectrum analyzer also claims there are weak peaks at around 1,311 MHz and 1,748 MHz during most of the mode sweep cycle, not simply that period where the self mode-locking takes place. However, it’s not clear where these originate, or if they are even real. To be direct, the one at 1,748 MHz would require 5 modes to produce a beat at 4 times the mode spacing of 437 MHz. But there are never 5 modes present, let alone for most of the cycle. Perhaps they are the sum of second-order beats. Or, they could simply be an artefact of the analyzer, perhaps leakage from an internal mixer.
The above image shows scope display for a JDS Uniphase 1145P, with a mode spacing of 438 MHz (around 34 cm between mirrors). The additional complexity is due both to the lower beat frequencies (and thus better response of the scope) as well as the greater number of modes oscillating. An RF spectrum of this laser would have many more peaks closer together, but would look generally similar to that of the 5 mW laser.
Mode spacing of 687 MHz (around 22 cm between mirrors). With only 3 longitudinal modes oscillating (and stressing the bandwidth capabilities of the poor scope), the display is a fairly clean sine wave. The only obvious difference during mode sweep is that the amplitude changes slightly. However, most of the time, it is a relatively clean sine wave and for a higher power healthier tube, the reduction in amplitude is not that great as in this example.
Transverse Modes of Operation
Lasers can also operate in various transverse modes. Laser specifications will usually refer to the TEM00 mode. This means “Transverse Electromagnetic Mode 0,0” and results in a single beam. The long narrow bore of a typical HeNe laser forces this mode of oscillation. With a wide bore multiple sub-beams can emerge from the same cavity in two dimensions. The TEM mode numbers (TEMxy) denote the number (minus one) or configuration of the sub-beams.
Here is a rough idea of what transverse modes might look like for a rectangular cavity:
O OO OOO Each 'O' represents
O OO O OO OOO a single sub-beam.
TEM00 TEM10 TEM01 TEM11 TEM21
I have only shown the rectangular case because that’s the only one I could draw in ASCII!
Other (non-cartesian) patterns of modes will be produced depending on bore configuration, dimensions, and operating conditions. These may have TEMxy coordinates in cylindrical space (radial/angular), or a mixture of rectangular and cylindrical modes, or something else!
To achieve high power from a He-Ne laser, the tube may be designed with a wider but shorter bore which results in transverse multimode output. Since these tubes can be smaller for a given output power, they may also be somewhat less expensive than a similar power TEM00 type. As a source of bright light – for laser shows, for example – such a laser may be acceptable. However, the lower beam quality makes them unsuitable for holography or most serious optical experimentation or research. An example of a high power multimode He-Ne laser head is the Melles Griot 05-LHR-831 which has a rated output power of 25 mW. Compared to their 05-LHR-827 which is a 25 mW TEM00 laser head, the multimode laser is about 2/3rds of the length and runs on about 3/5ths of the operating voltage at lower current.
(Note that it is easy in principle to convert the output of a TEM00 laser into multimode by using a length of fiber-optic cable with lenses at each end to focus the beam into it and collimate the beam coming out. If the core diameter of the fiber is greater than that needed for the fiber itself to be single mode, then the result will be that multiple modes will propagate inside and the output will be multimode. To assure single mode propagation at 632.8 nm with the index of refraction of a typical glass fiber, a 4 um or smaller core is needed. The actual core diameter of the fiber will determine how many modes are actually generated. A core diameter of 10 um will result in a few modes while one of 125 um will produce dozens of modes. Why this would be desired is another matter.) However, all these modes will be exactly the same wavelength since they originate from a single TEM00 beam.
Sometimes, laser companies don’t quite get it right either and a laser tube that is supposed to be TEM00 may actually be multi-transverse mode all the time or whenever it feels like it (e.g., after warmup). I have a 13.5 mW Aerotech tube that is supposed to be TEM00 but produces a beam that has an outer torus (doughnut shape) with a bright spot in the middle. I’ve also seen an apparently factory-new Uniphase green He-Ne laser that produces a similar doughnut beam. Both of these are probably the result of one or both mirrors having a radius of curvature that is too short for the bore diameter. They may have been manufacturing goofups. Everyone can have a bad day, even if it results in a bunch of dud lasers. 🙂 Good for us though. Everyone (well everyone who cares!) has seen a nice TEM00 He-Ne laser. How many have one that does three wavelengths with different mode structures! 🙂
Note that the mode structure implies nothing about the polarization of the beam. Single mode (TEM00) and multimode lasers can be either linearly polarized or randomly polarized depending on the design and for the multimode case, each sub-mode can have its own polarization characteristics. HeNe (and other) lasers will be linearly polarized if there is a Brewster window or Brewster plate inside the cavity. The majority of HeNe laser tubes produce a TEM00 beam which has random polarization. For internal mirror tubes, linear polarization may be an extra cost option. External mirror HeNe lasers also generally produce a TEM00 beam but are linearly polarized since the ends of the tube are terminated with Brewster windows.
A fast photodiode (PD) and oscilloscope or RF spectrum analyzer can be used to view the frequencies associated with transverse modes. The transverse difference frequencies are very low compared to the longitudinal mode spacing so a really high speed PD isn’t needed. A response of a few MHz should be sufficient. Typically less than 2 mm square silicon PD will have an adequate frequency response if back biased. But the modes do have to overlap on the detector so it may be necessary to spread the beam of a multimode He-Ne laser using a lens. A polarized tube is best as it forces the modes to have the same polarization (a PD will not detect the difference frequencies for orthogonally polarized modes). But, adding a polarizer can partially compensate for this, though the polarization may drift with a randomly polarized laser.
Multi-Transverse Mode He-Ne Lasers
As noted, most He-Ne lasers are designed to operate with a single transverse (spatial) mode or TEM00. However, to obtain the highest power for a given tube size or by a goof-up in design, a higher order mode structure may be produced. A non-TEM00 mode may be present if:
The bore is too short.
The bore is too large in diameter.
The mirror RoC is too short.
The mirror is too far from the bore-end (same effect as bore being too short).
All of these are really somewhat equivalent and simply mean that more than one mode fits inside the available active mode volume.
For a laser designed to be multimode, a low order mode pattern is typical, though it may not look like the examples in textbooks. Mode patterns that resemble hexagonal close-packed honey combs are often the rule rather than the exception since the circular bore doesn’t really favour Cartesian modes like TEM11 or TEM22. And tubes designed to be multimode will probably have higher order modes than TEM01 or TEM10. Multimode He-Ne lasers typically have 50 to 100 percent more output power for their length than equivalent lasers operating TEM00.
For a laser with a very wide bore like one using the Melles Griot 05-LHB-570 one-Brewster laser tube and a short RoC mirror, a high order mode structure will be produced with a dozen or more individual spots in a more or less random (possibly sort of hexagonal) pattern.Where there is access to the inside of the cavity (as with a one-Brewster tube), a laser that operates multimode can be forced to operate TEM00 with a stop (aperture) between the external mirror and tube-end. However, there will be a (possibly substantial) reduction is output power. Where both mirrors are external, it may be possible to substitute longer RoC mirrors to force TEM00 mode (again at the expense of some output power).
For a laser that is supposed to be TEM00 but due to a design error isn’t, a TEM01 or TEM10 pattern is typical or it may produce a beam shaped like a doughnut (torus) with or without a spot in the middle. I have several long Aerotech He-Ne lasers heads rated 12 mW (actual output power around 13.5 mW) that produce a beam like this. This was either by design, or an “oops” and the heads were relabelled with an “M” indicating multimode.
Sometimes, slight misalignment of the mirrors will produce a multimode (probably TEM01 or TEM10) beam in a laser that otherwise operates reliably TEM00. A warped or misaligned bore may also do this.
Note that a speck of dirt or dust on the inside of a mirror or window (if present), or damage to an optical surface, can result in a multi-transverse mode beam even if the bore and mirror parameters are correct for TEM00 operation. Unfortunately, convincing a bit of dust to move out of the way isn’t always easy on the inside of an internal mirror He-Ne laser tube! Yes, though not common, it can happen. This is one reason not to store tubes vertically. I’ve heard of people successfully using a Tesla (Oudin) coil to charge up the errant dust particle, causing it to just out of the way via electrostatic repulsion. Your mileage may vary. 🙂
Coherence Length of HeNe Lasers
Common He-Ne lasers have a coherence length of around 10 to 30 cm. By adding an etalon inside the cavity to suppress all but one longitudinal mode, coherences lengths of 100s of meters are possible. Naturally, such He-Ne lasers are much more expensive and are more likely to be found in optics research labs – not mass produced applications. However, slightly less exotic and expensive stabilized He-Ne lasers are readily available which oscillate on two orthogonal longitudinal modes and locked so they are in a fixed position. When one mode is blocked with a polarizer, the resulting beam is then (nearly) single frequency with a coherence length of hundreds of meters – much longer than can even be measured without a great deal of effort and expense.
The following actually applies to all lasers using Fabry-Perot cavities operating with multiple longitudinal modes. It was in response to the question: “Why does the coherence length of a He-Ne laser tend to be about the same as the tube length?” The answer is that the coherence period is equal to the tube length but the useful coherence length is generally less (except for the special case above of a single mode).
(From: Mattias Pierrou.)
In a He-Ne laser you typically have only a few (but more than one) longitudinal modes. These cavity modes must fulfil the standing-wave criterion which states that must be an integer number of half wavelengths between the mirrors. In the frequency domain this means that the ‘distance’ between two modes is delta nu = c/(2L), where L is the length of the laser.
The beat frequency between the modes gives rise to a periodic variation in the temporal coherence with period 2L/c, i.e. full coherence is obtained between two beams with a path-difference of an n*2L (n integer).
If you have only one frequency, the coherence length is infinite (that is, if you neglect the spectral width of this mode which otherwise limit the coherence length). If you have two modes, the coherence varies harmonically (like a sinus curve).
The more modes you have in the laser, the shorter is the regions (path-length differences) of good coherence, but the period is still the same.
You can try this by setting up a Michelson interferometer and start with equal arm-lengths which of course gives good coherence. Then increase the length of one arm until the visibility of the fringes disappear. This should occur for a path-difference slightly less than 2L (remember that the path-difference is twice the arm-length difference!). If there are only two modes is the laser the zero visibility of fringes should occur at exactly 2L. Now continue to increase the path-difference until you reach 4L (arm-length difference of 2L). You should again see the fringes clearly due to the restored coherence between the beams.
Ripple, Noise, and Other Artifacts in HeNe Lasers
While one normally thinks of a He-Ne laser as a constant or “Continuous Wave” (CW) source, this is far from the case over a wide range of time scales from nanoseconds to hours. Only to our long obsolete Mark I eyeballs does a typical He-Ne laser really look like the DC equivalent of light. 🙂
Some of these artefacts result from implementation but others are fundamental to the lasing process. The following apply to normal He-Ne lasers (not those involving Zeeman splitting or something more exotic):
Mode sweep (seconds to hours):
Longitudinal mode beating (less than 100 MHz to 1.5 GHz):
Transverse mode beating (1 MHz to 100s of MHz):
Plasma oscillations (100 kHz to several MHz):
Plasma instability:
Higher order mode pulling (1 kHz to 1 MHz):
Mirror birefringence (100 kHz to 1 MHz):
HV power supply line frequency ripple (50/60 Hz and harmonics):
HV power supply switching frequency ripple (20 to 100 kHz and harmonics):
Mode flipping (0.1 s to minutes):
The closest to a constant output would probably be an intensity stabilized He-Ne operating on a single longitudinal mode, often called “single frequency” (which is close but even that is not totally accurate), with a highly filtered He-Ne laser HV power supply.
Longitudinal Mode Pulling
While introductory textbooks may state that lasers oscillate on multiples of the cavity resonance frequency, c/2L, it turns out that this is actually not true in most cases. (The exceptions would be where the gain curve is essentially flat but that’s another story.) Longitudinal modes that aren’t exactly centered on the gain curve will be at frequencies very slightly offset from these, pulled toward the center of the gain curve with those that are farthest away seeing the most shift. This is a well known effect called “mode pulling” with highly developed theory to back it up. (Mode pulling isn’t unique to lasers. For example, a quartz crystal oscillator can be tuned over a small range using an external capacitor even though its mechanical resonance frequency differs from the output frequency.)
Although the math can get to be rather hairy, one way of thinking of mode pulling is that the cavity bandwidth has a finite extent which depends primarily on the reflectivity of the mirrors and cavity length. So, if the net gain is greater slightly off to one side due to the position of the gain curve relative to the cavity resonance, the lasing line will be shifted in that direction.
When the laser beam hits a high speed photodetector like a photodiode, which is a non-linear (square law) device, in addition to the DC power term, there are the primary difference frequencies which are close to multiples of c/2L (but not exactly due to mode pulling), but also the differences of the difference frequencies – the second order intermodulation products – which will be at (relatively) low frequencies compared to c/2L. As the cavity length changes and the lasing modes drift across the gain curve, the mode pulling effect on each one varies slightly. But, small differences between large numbers can result in dramatic changes in these second order terms, rapidly rising and falling in frequency, and coming and going as modes drop off one end of the gain curve and appear at the other. The amplitude of the second order beat will be much lower than that of the primary beat but is still detectable with a spectrum analyzer, or in some cases with an audio amplifier.
For a He-Ne laser, the range of second order frequencies is typically in the 1 kHz to 100s of kHz range while for a solid state laser it will be in the MHz to 10s or 100s of MHz range. Note that there will generally not be any beat in the range from 0 Hz to some minimum frequency (e.g., 1 kHz or so in the case of the He-Ne laser) as would be expected when the modes are almost symmetric on either side of the gain curve where there would be very low second order frequencies. Apparently, a self mode-locking effect occurs to force these to be exactly zero frequency over a small range of mode positions. This behaviour can easily be observed in the mode beat RF spectrum of a medium power (e.g., 5 mW) He-Ne laser. See the next section.
For these second order beat frequencies to be present, the laser has to be able to oscillate on at least 3 longitudinal modes simultaneously. (With only 2 modes, there will be only a single difference frequency.) The Doppler-broadened gain curve of neon for the He-Ne laser is about 1.5 GHz Full Width Half Maximum (FWHM) at 632.8 nm. To get 3 modes requires the modes to be less than about 500 MHz apart implying a c/2L tube length of about 30 cm or more – typical of a 5 mW or more (rated) He-Ne laser. It should be polarized to force all modes to be of the same polarization – orthogonal polarizations do not mix in a photodetector. For a randomly polarized laser which typically produces alternating polarizations for adjacent modes, a longer tube length would be required to guarantee enough same-polarized modes and/or a polarizer at 45 degrees to the beam polarizations could be added (but this would cut the power to the photodiode by 50 percent or more).
This effect can be demonstrated using a medium length He-Ne laser, high speed photodiode, and audio amplifier. Initially when the laser is turned on and is heating up and expanding the fastest, they may sound like clicks or pops or just non-random noise. As the expansion slows down, more distinct chirps and other interesting sounds will appear. The complexity of the symphony will also depend on the tube length and thus how many modes are oscillating.
A more precise way to look at mode pulling would be to monitor the beat frequencies produced by a high speed photodiode using an RF spectrum analyzer. By expanding the region around c/2L, the changes during mode sweep will be clearly evident. There will be smooth movement as well as sudden shifts corresponding to mode hops. I even did this by beating not a single laser, but two identical stabilized He-Ne lasers against each-other. With two modes from each laser, there are then as many as 6 beat frequencies if 45 degree polarizers are placed in front of each laser and they are then combined in a non-polarizing beam-splitter. I’ll leave analysis of this behaviour as an exercise for the student. It is at first a bit confusing, but with some thought, makes perfect sense. Simply concentrating on the mode pulling of each laser’s longitudinal mode where one laser was locked and the other was allowed to mode sweep yielded a shift of about 500 kHz.
You can “listen” to a single mode He-Ne tube: Take an X-rated photodiode and an AC power amplifier – guide a small part of the He-Ne laser beam to the photodiode (don’t let it saturate!) – and listen to the “chirping oscillations” during warming up with a speaker. Hint: There are no birds inside the tube. 😉 But it sounds similar! Looks like sin(x)/x.
Low Level Oscillation due to Mirror Birefringence
This is a phenomenon whereby a low level oscillation in output power at hundreds of kHz is present during part of the mode sweep. It’s not something you would see by eye or likely run into by accident, as the variation is typically only around 1 percent of the total power of the tube. But it is in the category of “interesting”. 🙂 In fact, the oscillation was detected only because the spectrum generated by an optical instrument using a laser with this affliction as a wavelength reference was being corrupted by spikes at frequencies that should not have been there. It would go unnoticed by at least 99.999% of the users of He-Ne lasers. 😉
For the following, refer to [download id=”5602″] and click on the last slide to enter the animation. Though slightly shorter, the tube simulated in the animation will have mode sweep similar to that of the tubes in question, with no more than 3 modes present at any time. The red and blue modes denote the two orthogonal polarization axes of the tube called “p” and “s”.
The tubes in which these low level oscillations have been observed are all between around 9.0 and 10.5 inches (approximately 225 to 260 mm) in length with random polarization. These have at most 3 modes. It may be present in longer tubes with more modes but this has not been confirmed. Tubes with fewer than 3 modes are immune.
So far, only the Zygo 7701/2 and another unidentified Zygo tube, and the Siemens/LASOS LGR-7621s have unequivocally exhibited these oscillations. Tests with the Melles Griot 05-LHR-038 and 05-LHR-117, Spectra-Physics 088-2, and Siemens LGR-7631A resulted in no detectable oscillation even though these tubes are physically similar. When a tube exhibits oscillations, all samples of the same model will do so as well. At least until contradicted. 🙂
The oscillation will be present ONLY where 3 longitudinal modes are present – there are 2 blue modes on either side of a red mode, or 2 red modes on either side of a blue mode in the animation. Most of the time, it will appear instantly as soon as a third mode pokes its head above the noise. But in some instances, there will be a delay, and then appear instantly. (Not ramp up to any degree.)
The phase of the oscillation is opposite for p and s polarization and their amplitude is similar. Thus, unless only p or only s is selected with a linear polarizer, little or no oscillation may be detected. This means that the p modes are changing in amplitude 180 degrees out of phase with respect to the s modes. And this has been confirmed by observing the p and s oscillations simultaneously using a Polarizing Beam-Splitter (PBS) and two biased photodiodes, while also viewing the longitudinal modes on a Scanning Fabry-Perot Interferometer (SFPI). This would then seem to be some sort of mode competition between the p modes and s modes. (I’ve heard that this opposite phase may not be true with every sample of the same model where the oscillations occur but until I see it with my own eyes, I’ll continue to make the claim!)
The p-p amplitude of the oscillation is only on the order of 1 percent of the total output power of the tube. (See why I said you probably wouldn’t see this!) For a tube outputting 3.5 mW total with 2 to 2.5 mW peak in each polarization, this ends up being about 10 mV p-p from the photodiodes. Its amplitude varies somewhat, peaking near the center of the period in which the oscillation is present. The variation may be small or as much as 2:1 depending on the specific laser tube, but does NOT track the amplitude of either of the side modes. The signal appears almost instantly at a minimum of 1/2 its maximum.
The frequency of the oscillation is typically between 200 and 600 kHz and differs for each sample of the laser tube (even of the identical model) and possibly depending on whether a p or s mode is in the center (meaning the orientation is a factor). Thus, it is dependent on a physical characteristic of the tube. It also depends on the temperature of the tube to some degree. (No pun….) Here are some *very* rough estimates of the frequencies ranges for several tubes:
Interestingly, both oscillation frequencies for the Zygo Unknown model tubes were similar, and in one case identical within the uncertainty of my measurements. This was also the only sample of those tubes that I had added “wedge” to the HR mirror since they lacked it for some reason. So possibly the slight back-reflections from the outer surface of the mirror substrate do have some minor effect.
Additional frequencies at around 1.95 MHz were seen on some of these tubes but they were at much lower levels, and possibly NOT correlated with the presence of 3 longitudinal modes. Another mystery.
Except for where the oscillation nearly abruptly appears or disappears (which can have a huge change), the frequency increases or decreases more or less monotonically by up to 10s of percent during the period in which it is present. Whether it increases or decreases depends on if the p or s polarization is in the center, another indication of a physical dependence on tube construction. The monotonicity also indicates an asymmetry in the behaviour with respect to the gain curve or something related to it. Note that the LASOS 7621s and Zygo 7701/2s only varied by 15 to 30 kHz while some of the unknown Zygo tubes varied by almost 200 kHz.
Since the precise behaviour depends on whether the p and s polarization is in the center, and polarization axes are locked to tube orientation, the current hypothesis is that these result from (or are at least affected by) mirror birefringence. Mirror birefringence results from mirror coating processes that are not perfectly symmetric due a crystalline structure or whatever. The result in an effective depth of reflection – and thus cavity length – that depends on orientation, with a typical variation of a fraction of 1 nm.
1 nm of cavity length change at 633 nm for a tube with a cavity length of 9 inches (around 225 mm) represents a frequency change of approximately 2 MHz. So, the observed shifts being in the 100s of kHz would be consistent with p and s modes being shifted off of normal c/2L cavity resonances by a fraction of 1 nm, resulting in some sort or low level mode competition. Perhaps the LASOS and Zygo tubes differ in whether 1 or both mirrors have significant birefringence. But exactly how this all works beyond the above statments would be total hand waving, as if it isn’t already. 😉
Not all coating processes exhibit birefringence but it’s quite possible those used in most common He-Ne laser tubes do since they tend to have fixed polarization axes. And there can also be birefringence resulting from other asymmetries in the tube construction, though they may be smaller. Known exceptions with very low birefringence are REO (based on their own claims and that where fixed polarization axes are required as with most stabilized He-Ne lasers, REO tubes must be more complex to get around this “feature”) and HP/Agilent Zeeman He-Ne tubes (which have very peculiar mode sweep without their Zeeman magnets). Because REO and HP/Agilent tubes are so strange to begin with, it would not be possible to test them for this type of oscillation. Nor is there any easy way of determining if those tubes that don’t exhibit the oscillations have lower or no birefringence. But there must be some asymmetries because they all have fixed polarization orientation.
In coming to the conclusion of mirror birefringence or something related, the following have been ruled out:
Higher order longitudinal mode beating: While the primary longitudinal modes differ in frequency by close to cavity mode spacing of c/2L, they aren’t precisely c/2L due to mode pulling effects, which can result in them being off by frequencies in the 100s of kHz range. Then the second order beats – the beats of the beats – could have a difference frequency in this range. However, this would not explain the opposite phase or how a single mode could have the oscillation. And, it would not explain why the low level oscillation is absent from other similar tubes.
Transverse mode beating: Not only would it be extremely unlikely for all of these TEM00 tubes to have significant higher order transverse modes, but an explanation involving them would also not be able to account for the opposite phase behavior or the oscillation from a single longitudinal mode. LASOS tube ID #2 did have a non-TEM00 mode of about 2 percent of total power that appeared for a portion of the mode sweep cycle, but it’s occurrence did not coincide with the low level oscillation. LASOS tube ID #1 had a barely detectable non-TEM00 mode of about 0.05 percent, too small to be a factor. Any non-TEM00 modes in the other tubes were even smaller or non-existent.
Zeeman splitting: There are no magnets or magnetized material in the vicinity. Also, the amplitude of the oscillation is a maximum when a polarizer passes the entire center mode leaving no opportunity to combine two sub-modes in the PD. The mode itself could be split somehow into two sub-modes that cannot be resolved on the SFPI, but (1) there is no basic principle to support this, (2) it doesn’t explain how the side modes have the same frequency, and (3) that they are out of phase.
Plasma oscillations: While these may occur in the 100s of kHz range, they do not depend on mode position. And in addition, varying the power supply current has essentially no effect on the observed behaviour with respect to the low level oscillations.
Harmonics of the power supply ripple: Multiple power supplies have been tested with these tubes and there was absolutely no difference, as well as having no correlation to mode position.
Back-reflections: This is sort of grasping at optical straws, but to rule it out, I added wedge to the HR mirror on one Zygo tube that didn’t have it. This minimizes reflections from the uncoated outer surface of the mirror substrate from getting back into the cavity. As expected, there was no change.
While I believe the same phenomenon is responsible for these oscillations in LASOS and Zygo tubes, there are differences. Notably with the Zygo tubes, the frequency changes by almost 2:1 compared to only 20 kHz or so for the LASOS tubes. On one sample, ranging from around 200 kHz to 360 kHz. And compared to the LASOS tube where the two frequencies differed by almost 2:1 (around 280 and 500 kHz) they are similar enough for the Zygo tube that they may in fact be the same, but alternately increasing and decreasing depending on whether a p or s mode is in the center.
I’m sticking with mirror birefringence for now. It may be a feature, not a bug. 🙂 Specifically, that a higher birefringence coating on one or both mirrors is used to lock the polarization orientation, required to be able to use these tubes in stabilized He-Ne lasers, though I’m not sure LASOS and Zygo are that sophisticated!
The test to reproduce this phenomenon is relatively simple and doesn’t require fancy expensive instrumentation. The main components are a polarizer or polarizing beam-splitter, a biased silicon photodiode (almost any type will do using a circuit similar to what’s in a Thorlabs DET210 or DET10A (Google will find it), and an oscilloscope (almost any type since the frequencies involved are under 1 MHz). Terminate the output in 2k to 5k ohms and set the scope for a vertical sensitivity of a few mV/division, AC-coupled, and a sweep speed of a few µs/division. The tubes should be red (633 nm), random polarized, and healthy. (I have no idea what happens with other colour tubes!) They should be between 8 and 10 inches in overall length. Shorter tubes will have only 2 modes at most. Longer tubes with more modes may work, but that is left as an exercise for the student. 🙂 Since the signal is so low level – around 10mV even from a tube producing 3 or 4 mW, eliminating other sources of ripple and noise can be a challenge. Specifically, the current ripple from the He-Ne laser power supply may overwhelm and bury the low level oscillation signal. A highly filtered linear supply is best though some modern switchmode “bricks” have decently low ripple. And an external ripple reducer can be added to these. The photodiode will also need to be blocked from room light as the variation in intensity from lamp ballasts will be picked up. Power everything up and look for a clear oscillation in the 100s of kHz range that comes and goes, at a decreasing rate as the tube warms up. Rotate the tube over 45 degrees to align for maximum signal. If you have an SFPI, use a non-polarizing beam-splitter to sample a portion of the tube’s output for it to show how the oscillation correlates with the number of modes and their position. As noted above, only selected tubes exhibit this phenomenon and unfortunately, they are not the most commonly available ones. So your mileage – and success – may vary. 🙂
What is Mode Locking?
The normal output of a He-Ne or other CW laser is a more or less constant intensity beam. Although there may be long term variations in output power as well as short term optical noise and ripple from the power supply, these are small compared to the average intensity. Mode locking is a technique which converts this CW beam to a periodic series of very short pulses with a length anywhere from picoseconds to a fraction of a nanosecond. The separation of the pulses is equal to the time required for light to make one round trip around the laser cavity and the pulse repetition rate (PRF) will then be: c/(2*l). For example, a laser resonator with a distance of 30 cm (1 foot) between mirrors, would have a mode locked PRF of about 500 MHz.
Mode locking is implemented by mounting one of the mirrors of the laser cavity on a piezo-electric or magnetic driver controlled by a feedback loop which phase locks it with respect to the optically sensed output beam.
Without mode locking, all the modes oscillate independently of one another with random phases. However, with the mode locked laser, all the cavity modes are forced to be in phase at one point within the cavity. The constructive interference at this point produces a short duration, high power pulse. Destructive interference produces a power of almost zero at all other points within the cavity. The mode locked pulse then bounces between the two laser mirrors, and a portion passes through the output coupler on each pass.
As a practical matter, you probably won’t run into a mode locked He-Ne laser at a garage sale!
Cavity Dumped Pulsed He-Ne Laser
Here’s another one that won’t turn up at a swap meet. Inside the cavity of a typical He-Ne laser, the circulating power is 50 to 1,000 times the output power. If only all those photons could be accessed! Well, it turns out there is a way to do this sort of, at least in principle and for a short time. It’s called “cavity dumping”. The idea is use a high speed optical switch to briefly divert the Intra-Cavity (IC) beam outside the cavity. This sounds simple, right? 🙂 There are just a couple of problems. With the low gain of the typical He-Ne laser, any optics inside the cavity has to either be at the Brewster angle or have very good AR-coated surfaces so as not to significantly impact circulating power, or kill lasing entirely. And since any practical He-Ne laser is limited in size perhaps 2 meters at most, the switching has to take place in nanoseconds to get any significant fraction of the IC power to exit the laser.
The optical switch is the key to making this work. Either it has to actually deflect the beam or change its polarization so some other optical element will then reflect it out of the cavity. There are devices like Kerr cells and Pockels cells that could potentially be fast enough but they require high voltage to operate and may have excessive losses. Other approaches use an Acousto-Optic Modulator (AOM) as a deflector to divert the IC beam just enough to be reflected out of the cavity. However, AOMs don’t operate instantaneously since they depend on a high frequency acoustic wave to propagate in their crystal. Even a high performance AOM would require 10s or even 100s of nanoseconds to switch states.
I’m sure a literature search would turn up some mouldy papers describing the cavity dumping technique with a HeNe laser, but a “proof of concept” experiment was performed recently by Kevin Zheng, a very talented high school student, while at the Stony Brook Laser Teaching Center. See Kevin’s Research Journal and Poster. While the performance wasn’t that fabulous (forget any ideas of a hole burning HeNe laser!), just being able to get this work at all with relatively limited resources is impressive.
He-Ne Laser Output Power Fluctuation During Warmup
While not generally visible by eye alone except possibly for very short or tired (low gain) He-Ne lasers, there is a quasi-periodic variation of output power with time. For the typical He-Ne laser tube shortly after turn-on, the frequency is quite rapid (a cycle every few seconds) and gradually slows down as the tube temperature reaches a steady state value (after a half hour or more).
Note that while the frequency of the power variations in output power of a He-Ne laser goes to beyond the GHz range, the following deals with what can be seen by human eyeballs with the aid of only a photodiode and multimeter or chart recorder (or a PC with a data aquisition module).
Here is a plot of the measured output power of mid-size (probably around 5 mW) He-Ne laser tube from power-on to 20 minutes:
Typical He-Ne Laser Output Power Versus Time During Warmup
(Plot courtesy of Ryan Haanappel). (Though typically, the output power starts out at a much higher value, often above 75 percent of its value after full warmup. But there are exceptions.) Many more plots can be found later in this section.
Examining the actual plot of output power versus time such as shown below:
He-Ne Laser Output Power Fluctuation During Warmup
(or careful observation of laser power meter readings) of a He-Ne laser reveals that the curve is not simple but may include several types of behaviour:
Long term trend in output power: With a laser that is in good condition, this is a generally increasing function until it levels off after warmup. The dominant effect is that as the laser tube heats, various parts expand and the laser approaches optimal alignment (which should have been the way it was originally adjusted during manufacture). If the mirror alignment is not quite correct, power may go up and then down, or just down, and/or may never reach rated power. If the cause is alignment, gently pressing side-ways on one of the mirror mounts at the correct angle with the correct force (with an insulated tool!) should result in near maximum power even when just powered on.There is also usually an increase of power due to the heating of the laser tube (independent of thermal expansion effects) as well. But this may be only a fraction of the effects of alignment and is related to the increase in internal temperature and pressure.In addition, especially with soft-seal tubes, there may be a power increase as the cathode, acting as a weak getter, removes contaminants from circulation that may have accumulated from a period of non-use. Or depending on how far gone they are, the power may go down as various parts outgas from the heat!Depending on the particular laser, the initial output power can be very low even where the final output power exceeds rated power. Striking examples can be found in a non-negligible percentage of long JDS Uniphase He-Ne lasers like the 1145P. With these, a cold power of 1 or 2 mW for a laser that reaches 24+ mW after 20 minutes isn’t unheard of. The dominant cause is a change in mirror alignment.
Short term variations in output power: As the laser tube heats and expands, the longitudinal modes of the laser drift across the 1.5 GHz neon gain curve. The output power varies depending on where they are and may change suddenly as a mode drops off one end or appears at the other. For a 6 inch tube (c/2L=0.5 GHz), there are 1 or 2 active modes; for a 24 inch tube (c/2L=125 MHz), there may be 8 or 10 active modes. The short tube will usually have much more dramatic variations in power due to this mode cycling. Specifications range from 20 percent (for 5 inch tubes) to less than 2 percent for long ones. For a short random polarized tube, the polarized modes may vary by 100 percent. Note that the variations may not be of a single frequency but often exhibit the double-dip behaviour shown in the plot, above. This is probably due to the number of modes oscillating and how they are centered on the gain curve. There may also be a slight difference on alternate cycles due to the polarizations of adjacent modes seeing slightly different gain.These effects are collectively called “mode sweep” or “mode cycling”. Plotting and analyzing this behaviour for various tubes under a variety of conditions can be quite fascinating. More in the next section.
Medium term variations in output power: (These are generally less common with lasers that are properly designed and manufactured.) There are two common types of medium term effects:
IR Mode competition: This is generally only a problem with higher power lasers. It is usually at the high gain 3.39 um mid-IR He-Ne lasing wavelength and may result in an additional variation in output power. While longer tubes generally are designed with mirror coatings highly transparent at the 3.39 um wavelength and/or with IR suppression magnets, their effect isn’t always perfect. These power variations will be at a frequency 0.633/3.39 (for 633 nm, red He-Ne lasers) of the fundamental frequency of the primary mode cycling, above. The effect will be negligible for red He-Ne lasers of less than 15 or 20 mW but may appear in relatively short “other colour” (e.g., yellow) He-Ne lasers due to the low gain of the lasing wavelength. A simple test is to carefully place a few reasonably powerful magnets at several locations near the tube. If the problem is mode competition, the amplitude of the variations should be reduced and output power at the design wavelength may increase by 10 or 20 percent or more. Modern He-Ne lasers rarely suffer from IR mode competition.
Non-wedged mirror substrates: Another source for power variations on a similar time scale is a lack of wedge in the HR and/or OC mirror glass substrates. Wedge means that the two surfaces are ground at a slight angle. Without wedge, the mirror coating and the uncoated outer surface (HR) or AR-coated outer surface (OC) form an etalon whose transmission varies as the glass expands during warmup due to constructive and destructive interference within the mirror glass. The result is that the power of the waste beam from the HR mirror may vary periodically by an amount much larger than that of the mode sweep specification, and it doesn’t track the power of the main beam as would be expected. Lack of wedge for the HR mirror is particularly nasty since the approximately 4 percent Fresnel reflection from the outer suface is enough to vary the transmission through the HR – and thus the waste beam power – by a ratio of up to 2.25:1. Waste beam power variation due to lack of wedge for the OC mirror is less severe since the AR coating results in less reflection but still may be 10 percent or more. While most applications don’t care what the waste beam does, there may also be ripples in the main beam of 1 or 2 percent. These will be superimposed on all the other power variations described above. For an enclosed cylindrical laser head, there may be up to 10 or more of these power variation cycles while a bare tube will go through fewer cycles because its temperature increase is not as great. These small power variations may be considered normal behaviour for short tubes where it is much less than those due to mode sweep, and no one (at least almost no one!) cares what the waste beam does. Mass produced barcode scanner tubes – built for low cost, not highest performance – are most likely to have this problem but many of them not too bad. Higher quality tubes will have both made with wedged substrates. Plots of power output during warmup for a few typical cases are also shown below.
Goofups in design and manufacturing can result in various combinations of these and other effects, though for the most part, He-Ne laser companies generally know what they are doing! 🙂 But see the plots below for both normal and abnormal behaviour, and a link near the end of the section for a case study of one dramatic example of an “oops”. 🙂
Plots of HeNe Laser Power Output and Polarized Modes During Warmup
Here are some plots of power output versus time for a variety of typical He-Ne laser tubes and heads from nearly the shortest available through mid-size. (For longer tubes, the appearance will be very similar, but with even a smaller short term fluctuation in power.) The shape of the plots is mostly the result of what’s called “mode sweep” or “mode cycling” as the longitudinal modes of the laser move with respect to the neon gain curve due to thermal expansion of the laser cavity. However, where the plot covers a long time (e.g., most of the warmup period), there will generally be an increasing trend in output power due to other factors as noted above.
Most of these are from Melles Griot but the behaviour of lasers from other manufacturers will be relatively similar, though the detailed shape of the individual polarized modes (more below) can differ significantly. The majority are healthy samples but a few show some rather dramatic peculiarities. There are also plots of a Coherent model 200 and Hewlett Packard model 5517A frequency stabilized He-Ne lasers from power-on to locking.
Plots such as these are almost like fingerprints for He-Ne lasers. Many of the physical characteristics of the laser can be determined by their appearance, and some features are unique to a particular model or manufacturer.
For most of the plots, my “instrumentation” consisted of a pair of $2 photodiode feeding two of the analog inputs of a DATAQ RS232 Chart Recorder Starter Kit attached to my ancient 486DX-75 Kiwi laptop running Win95. The photodiodes are reverse biased by 30VDC from a +/-15VDC power supply with a variable load resistor to set the calibration. The output is taken between the junction of the resistor and the photodiode, and power supply common (0 VDC). One channel is shown below:
The values shown were selected for lasers with a maximum power output of around 1 mW. For higher power lasers, R2+R3 can be decreased or an attenuation filter can be placed in the beam. The later is preferred to avoid shifting the 0 mW reference level, and is what I did for most of the plots.
The capacitor across the input is intended to minimize noise pickup. The resulting filter rolls off at around 0.1 Hz. For reasonably well behaved He-Ne lasers, even during the initial warmup period, this bandwidth is more than adequate. The sampling rate for all the plots is at least 10 Hz to allow for averaging since the A/D seems to have an uncertainty of about 2 LSBs.
In most cases, the two photodiodes are positioned at the outputs of a Polarizing Beam-Splitter (PBS) cube and the laser tube is oriented so that they are aligned with its natural polarization axes.
For monitoring power from the waste beam (which is much lower), a dedicated beam sampler assembly was constructed, which along with a photodiode preamp, enabled power levels as low as a few uW to fully utilize the 20 V p-p range of the A/D.
Some of the plots have been acquired with the same photodiodes, but feeding a dual channel preamp and also a summer tp compute the total power without requiring a separate photodiode channel. (Of course, for this to be meaningful, the photodiodes and premaps have to be set up so the two channels have equal gain.) The premap results in lower noise in the plots especially for low power lasers.
And as of 2011, I’ve “upgraded” to USB versions of the DATAQ device (DI-158U and DI-145) and laptops that are only 10 years old. 🙂 The original DATAQ RS232 module died and the Kiwi laptop doesn’t have USB and is falling apart (though is still usable). The PDs are now each attached to a general purpose trans-impedance amp rather than the simple bias network. [See the section: Sam’s Photodiode Preamp 1 (SG-PP1).] And in addition to channels 1 and 2, the outputs also feed a pair of resistors and a pot to adjust balance to channel 3 so their sum (which would usually be total power) is always present.
Although some of these plots aren’t as nicely annotated as the one above, zero power is near the bottom of the plot so relative power variations can still be easily seen (who cares about absolute power anyhow!) and the time/division is indicated. The plots are arranged by increasing laser tube length.
For the following, “Total” means all the power in the beam; “Polarized” means a polarizing beam-splitter is used to separate the two orthogonally polarized modes with either one or both plotted. (This is Only done for random polarized lasers.) The scale factor for the “polarized” plot has been adjusted so that the peak amplitude is approximately the same as for the “total” plot for ease of viewing. However, it should be understood, that the sum of the power in the two orthogonal polarizations must add up to the total power. All are red (632.8 nm) HeNe lasers unless otherwise noted.
Note: I have “edited” (doctored?) some of the plots to clean up unsightly randomness and other blemishes, mostly due excessive electrical noise at low optical power levels. However, the important features are unchanged.
Plot of Melles Griot 05-LHR-007 He-Ne Laser Tube During Warmup
This is the shortest commercial HeNe laser I know of with a total length of about 4-5/8 inches. The rated output power is 0.5 mW but this sample produces about 0.8 mW. Only 2 longitudinal modes will be oscillating with a mode sweep of about 10 percent. The large peaks correspond to a single mode being at the center of the gain curve. If the distance between the mirrors were much shorter, it wouldn’t be possible for even 2 modes to coexist and the output would turn off for a portion of the mode cycle. Note that the actual tube tested was a Siemens 007 but it has identical specs to the Melles Griot 05-LHR-007 so I figured it’s better to be consistent. 🙂 It was necessary to construct a tent over this (and other) bare tubes to even get this far without random air currents affecting the temperature too much. (The peaks beyond 20 minutes where this and the next run terminated were unrecognizable!) An enclosed laser head would take much longer to stabilize but be more tolerant of ambient conditions.
Plot of Melles Griot 05-LHR-007 He-Ne Laser Tube During Warmup (Polarized)
This is the same tube but with a non-polarizing beamsplitter followed by orthogonal polarizing filters inserted in the beam. The orientation of the polarizing filters is adjusted for minimum transmission when its mode is not present since as can be seen, the power actually goes to 0 mW for about half the period of each polarized mode. Alternate similar height peaks on the total power plot correspond to the same mode polarization. A careful examination will confirm that they actually alternate very slightly in amplitude due to minor variations in gain as a function of polarization. (I have adjusted the scale factors to make the plot looks similar.) The reason why the peak spacing on the two plots differs is that the tube was likely not quite at the same temperature when each run was started.
Plot of Melles Griot 05-LHR-640 He-Ne Laser Tube During Warmup
The 05-LHR-640 is very nearly second shortest commercial HeNe laser tube as shown below
Melles Griot 05-LHR-640 He-Ne Laser Tube
It is only about 5 inches in total length and as with the 05-LHR-007, only 2 longitudinal modes are oscillating. The rated output power is 0.5 mW but this sample produces about 1.2 mW. As can be seen in this plot, the “mode sweep percentage” is still rather modest – about 5 to 7 percent. The specification for this tube allows for up to 20 percent. This bare He-Ne laser tube has nearly fully stabilized in under 20 minutes.
Plot of Melles Griot 05-LHR-640 He-Ne Laser Tube During Warmup (Polarized)
. This is the same tube with the polarized modes separately plotted. Similar comments apply for this tube as for the 05-LHR-007, above.
Plot of Melles Griot 05-LHR-640 He-Ne Laser Tube During Warmup (Polarized)
Above shows the two polarized modes and total power in a laser with a cavity length of about 7 inches. This is just about at the point where 3 modes can barely lase simultaneously when one is centered on the neon gain curve.
Plot of Melles Griot 05-LHR-640 He-Ne Laser Tube During Warmup (Polarized)
This uses a slightly longer tube – almost 8 inches – which probably supports three simultaneous lasing modes. The rated output power is 1.5 mW but this sample produces about 2.0 mW. Since the 05-LHP-131 is a polarized laser, the polarization of all modes in the output beam is the same. As the length of the laser tube increases, the amplitude of the short term power variations will tend to decrease – for this laser head, it is under 2 percent. This is actually quite good – well below the 10 percent in the specifications. Being an enclosed laser head, even after 30 minutes, the power hasn’t fully stabilized.
Plot of Spectra-Physics 088 He-Ne Laser Tube During Warmup
This is a slightly longer random polarized tube, about 8.5 inches between mirrors. In addition to having been used by the hundreds of thousands in barcode scanners peaking during the 1980s, tube like this was used in the Spectra-Physics 117 and SP-117A (and similar Melles Griot 05-STP-901) stabilized HeNe laser. Note the well behaved mode sweep with smoothly varying polarization components and no flipping. A closeup is shown below
Plot of Spectra-Physics 088 He-Ne Laser Tube During Warmup (Detail)
Plot of Siemens LGR-7641 He-Ne Laser Tube With Variable Waste Beam Power During Warmup (Uncorrected)
While nearly identical in length to the SP-088, note the dramatic difference in the shape of the mode waveforms. Each is nearly a perfect triangle wave like the Melles Griot 05-LHR-911, above. This is especially evident near the end of the warmup period but it is very similar throughout. This shape seems to be characteristic of all these Siemens tubes as I’ve tested several with essentially the same mode waveforms. The mode shape of the Uniphase 098, another barcode scanner tube, is identical. The resonator length of the 088 and 098 is virtually identical, while that of the LGR-7641 is about 1/8″ longer. The cause is unknown but based on this, it doesn’t seem to be related to the size. A wild guess would be that it has something to do with the isotopic purity (or lack thereof) or ratio of the gas-fill resulting in a wider neon gain curve curve so that as with the 05-LHR-911, 3 longitudinal modes can just barely lase simultaneously when one is centered.However, the dramatic variation in mode amplitude over the course of warmup is an artefact of the way that data is being collected for this run and a peculiarity of the tube that doesn’t noticeably affect its useful output. Rather than using the output beam, the P and S Modes are taken from the waste beam leaking through the HR mirror at the back of the laser. The Total Power (Waste) is then simply the sum (in an op-amp) of the modes. Compare this to the Total Power (Output) curve, which was measured from the main beam. The cause of the rear beam power variation is interference from multiple internal reflections in the HR mirror glass – between the HR coated inner surface and the uncoated outer surface. The result is a weak Fabry-Perot etalon which varies the effective reflectance of the HR mirror. It doesn’t take much: A change from 99.975% to 99.95% would double the waste beam power – from about 15 uW to 30 uW. The 15 uW lost from the main beam power of about 1 mW is almost undetectable on the plot. The HR mirror glass is apparently not wedged on these tubes so the surfaces are very parallel. And indeed there was no ghost beam next to the waste beam as would be the case if wedge was present. The cause was confirmed by putting a dab of 5 minute Epoxy on the outer surface of the mirror. The Epoxy is smooth and clear enough to pass sufficient power for the photodiodes (though it is reduced), but the Epoxy surface is lumpy enough to greatly reduce the power variation. Why? The glass and Epoxy are fairly closely index matched so that the dominant reflection is no longer from the planar glass surface but from the lumpy surface of the Epoxy. There is minimal reflection directly back along the optical axis and thus minimal etalon effect resulting in a reduction of power variation from nearly 100 percent to under 10 percent. Using Norland 65 UV cure optical cement to glue an angled plate to the HR mirror reduced the ripples even more as shown below.
Plot of Siemens LGR-7641 He-Ne Laser Tube With Variable Waste Beam Power During Warmup (Uncorrected)
.
Plot of Uniphase 098 He-Ne Laser Tube With Waste Beam Power Variation During Warmup (Bare, Uncorrected)
is another similar (basically interchangeable) barcode scanner tube with the same malady as the LGK-7641: No HR wedge and large variation in waste beam power due to etalon effects. Insulating the same tube by installing it in a head cylinder allows for several cycles of the waste beam variation as shown below:
Plot of Uniphase 098 He-Ne Laser Tube With Waste Beam Power Variation During Warmup (Insulated, Uncorrected)
A close examination of the Total Power (Measured) shows small dips representing the power being stolen by the waste beam from main beam! The measured output power is about 1 mW. The amplitude of the waste beam power variation for this tube is from around 5 uW to 10 uW.
Plot of Melles Griot 05-LHR-006 He-Ne Laser Tube #1 With Waste Beam Power Variation During Warmup (Insulated, Uncorrected)
and
Plot of Melles Griot 05-LHR-006 He-Ne Laser Tube #2 With Waste Beam Power Variation During Warmup (Insulated, Uncorrected)
are examples of common short (6 inch) Melles Griot barcode scanner tubes with varying degrees of the same problem. #1 has nearly the theoretical maximum waste beam power variation ratio of 2.25:1.
Plot of Melles Griot 05-LHR-006 He-Ne Laser Tube With Minimal Waste Beam Power Variation During Warmup (Insulated, Uncorrected)
shows the behaviour of another virtually identical short (6 inch) tube with a small amount of wedge. But it’s enough to virtually eliminate power fluctuations in the waste beam. The residual ripples may actually be due to lack of wedge in the OC mirror and adding an angled plate to the OC mirror with optical cement actually made the ripples larger as shown below
Plot of Melles Griot 05-LHR-006 He-Ne Laser Tube With Moderate Waste Beam Power Variation During Warmup Due to Messed Up OC AR Coating (Insulated, Uncorrected)
. This is somewhat as expected since it’s not possible to index match to an AR-coated surface without removing the AR coating. So, the reflections there would increase.
Plot of Uniphase 1007 He-Ne Laser Tube With Minimal Waste Beam Power Variation During Warmup (Insulated, Uncorrected)
has even less. But another Uniphase tube had among the worst case as shown in
Plot of Uniphase 1007 He-Ne Laser Tube With Large Waste Beam Power Variation During Warmup (Insulated, Uncorrected)
These were identical model numbers used in the identical barcode scanners.
Plot of Melles Griot 05-LHR-151 He-Ne Laser Head During Warmup
This is a very common medium size HeNe laser with a tube about 13 inches in length so 4 or 5 modes are oscillating. The rated output power is 5 mW but this sample produces about 7.5 mW. The power fluctuations are virtually undetectable on these plots – well under 1 percent.
Plot of Melles Griot 05-LHR-151 He-Ne Laser Head During Warmup (Polarized)
This is the same laser head but with the two orthogonal polarizitions separated (as described for the shorter tubes, above) and oriented for maximum variation (“ripple”). They are plotted separately to reduce clutter. Since there are always modes of both polarization present regardless of polarizer orientation, the output power in doesn’t go to zero as with the shorter laser but their ripple is almost perfectly complementary. As expected, the size of the fluctuations in each polarization – 5 to 10 percent – is more in line with the total power behavior of a laser with only 2 or 3 modes. Even this amplitude seems remarkable given the almost perfectly smooth behavior of the total (randomly polarized) power. If the plots are examined very carefully, it will be noted that their envelopes are not identical – there is a very subtle slow variation over the course of the warmup period. This may be attributed to a small rotation of the polarization axes as the tube expands. With some samples of these lasers, it can be much more dramatic including polarization flips whenever it feels like it. But such behavior is still considered normal since for a random polarized laser, only the total power really matters, not any peculiar gyrations the modes may go through.
Plot of Normal Melles Griot 05-LYR-173 He-Ne Laser Head During Warmup
This is a typical yellow (594.1 nm) HeNe medium-long HeNe laser. The rated output power is 2.0 mW but this sample produces about 4.1 mW. Due to the low gain of the yellow lasing line, the amplitude of the power fluctuations is somewhat greater than for even the slightly shorter 05-LHR-151 red laser, above.
Plot of Melles Griot 05-LYR-173 He-Ne Laser Head During Warmup (Polarized)
The same laser with a polarizing filter in the beam. The fluctuations are larger as expected both because of the fewer modes in the polarized beam, and the lower gain of the 594.1 nm lasing line.
Not all lasers are manufactured properly. For example, one sample of a laser similar to the 05-LYR-171 exhibits a slow large amplitude oscillation in power. Compare:
Plot of Variable Melles Griot 05-LYR-171 He-Ne Laser Head During Warmup
and
Plot of Variable Melles Griot 05-LYR-171 He-Ne Laser Head During Warmup (Polarized)
with the plots above. The plots in blue are for the normal output beam from the front (OC) of the laser. The plots in red are for the excessively large waste beam from the rear (HR) of the laser – a clue to the part of the cause of the power oscillations. That has to be one spectacular screwup. I wonder how many laser heads were built that way. 🙂
Plot of Coherent Model 200 Stabilized He-Ne Laser Head During Warmup
. Finally, here is how a laser with active mode stabilization behaves. This laser is designed to provide a single longitudinal mode output with a frequency stability on the order of 1 MHz. Since the laser head has optics to separate the modes with orthogonal polarization, the raw beam already varies by more than 2:1 in output power without any additional polarizer. Yes, that is the actual spread – the vertical scale hasn’t been stretched! The actual HeNe laser tube inside is a specially selected Melles Griot 05-LHR-120, which by itself would have a normal mode sweep with a small ripple. From a cold start to lock takes about 20 minutes.
Plot of Coherent Model 200 Stabilized He-Ne Laser Head Near End of Warmup
This plot zooms in on the last two cycles. Notice that there is a slight distortion on the rising part of the second cycle in the plot. That is probably when the active feedback is switched on. Before then, the heater is simply running at a constant current to bring the tube up to operating temperature. It only takes less than one full additional cycle to achieve lock. The amplitude is then quite stable (uncertainty of less than 0.5 percent on the plot), but the frequency stability which is d(power)*slope(frequency/power), will be under 0.125 percent of the mode spacing of around 750 MHz, so less than 1 MHz.
Plot of Hewlett Packard Model 5517C Stabilized Laser During Warm up
Above shows how another even more highly stabilized (or at least more expensive!) laser behaves. Note that the entire warm up period from laser on to locked is only around 3.5 minutes because the heater for the active mode control is inside the laser tube, wrapped directly around the bore. The control algorithm during warm up is also a bit more sophisticated, pausing periodically to determine the “mirror spacing rod” temperature by measuring the heater resistance, and entering a “fine adjust” mode about half way through. In fact, from the relative shapes of the red and blue mode cycles, it can be seen that for this particular laser, during most of the time from power on (a cold start) to lock, the tube is heating (about 75 cycles), but it switches to steady cooling (about 6 cycles) just before locking.
Plot of Hewlett Packard Model 5517C Stabilized Laser Near End of Warm up
Above shows the 5 mode cycles just before locking and the final transition to the locked state. The peculiar shape of these Zeeman-split modes is clearly evident in this expanded view.The actual beat frequency is shown for the last few cycles and after locking in both these plots. This is the actual measured frequency captured along with the F1 and F2 modes, and total output power. (Showing the frequency plot earlier would be a mess.) The beat only appears for a small percentage of the mode cycles with some variation during the time it is present. The warm up and locking algorithm is partially responsible for the distorted nature of these plots compared to those for “normal” unstabilized He-Ne lasers or even other common stabilized He-Ne lasers due to the periodic pauses and switching from heating to cooling that may occur. However, the peculiar shape of the mode cycles themselves is due to the fact that these are not linearly polarized modes as with all the previous lasers. Rather, they are Zeeman-split modes distorted by a magnetic field and include (mostly) components differing in frequency by at most a few MHz, rather than the normal longitudinal mode spacing, which is 1.2 GHz for this laser.
Plot of “Flipper” Aerotech OEM1R He-Ne Laser Head During Warmup
This is a very naughty laser. 🙁 🙂 As can be seen, for most of the mode cycles during the warm up period, rather than the two orthogonal polarizations (called P and S) changing smoothly as they cycle, each one moves to a distinct point and then instantaneously swaps places with the other one. Tubes with flipper behaviour will generally not be useful for a stabilized He-Ne laser but may be perfectly satisfactory when simply used as a light source without polarizing optics.However, near the very end of the warm up period (measured in terms of mode cycles, not time) something very interesting occurs: The tube seems to have reverted to being well behaved! This only happens when the tube is approaching thermal equilibrium where each complete mode cycle is taking over 90 seconds. There are perhaps 3 or 4 beyond what is on the plot but the tube temperature is so close to its final value that any disturbance like moving near the laser head will disrupt the sequence. This behaviour is consistent from run to run. The cause is unknown, nor is it known whether the tube would continue to behave if stabilization was attempted. But it might since the operating temperature will be somewhat above the natural point of thermal equilibrium.
Plot of “Flipper” Aerotech OEM1R He-Ne Laser Head During First Part of Warmup
Above is a close up of the mode variations when flipping. The shapes are nearly identical from the start of warm up until the transition to normal behaviour. Also note that the frequency of the mode cycles for a flipper is double that of a normal tube – each mode would normally be what resulted from tracing the continuous curve and not taking the discontinuities as is evident below:
Plot of “Flipper” Aerotech OEM1R He-Ne Laser Head During First Part of Warmup (Combined)
So following red-blue-red, etc., ignoring the green lines.
Plot of “Flipper” Aerotech OEM1R He-Ne Laser Head at Transition to Normal Behaviour (Combined)
Above is a closeup of the point where flipping ceases. Note that the “envelope” of the mode plot is virtually unchanged at this point but the green transitions have disappeared. At the transition point, the period of a full mode sweep cycle is about 80 seconds. There are then an additional 10 full cycles (only 4 or 5 are shown) requiring about an hour until thermal equilibrium.
Plot of “Flipper” Aerotech OEM1R He-Ne Laser Head During Warmup
Above is an example of consistent flipper behavior. The character of the plot does not change from power-on to full warmup. There is a consistent flip at the same point in the mode sweep cycle. Interestingly, there is a slight asymmetry in the mode sweep envelope, unusual for most HeNe lasers. Whether this has any profound cosmic significance is unknown. 😉 These tubes were found in some barcode scanners due to their physical robustness – They could fall on the floor – or probably be used as hammers – without sustaining any damage! See the section: Metrologic Steel-Ceramic Hard-Seal He-Ne Laser Tubes.
These have all been high quality HeNe lasers and except as noted, have relatively predictable mode performance. For information and plots for a really ill-mannered beast, see the section: Far East HeNe Laser Tubes.
Mode Competition in Short He-Ne Lasers
If you haven’t been wondering why some of the output power plots are so strange, you should be. 🙂
The primary reason that the output power in any give longitudinal mode doesn’t vary in a nice smooth (Gaussian) manner is due to mode competition. If not for mode competition, the gain would not saturate and be the same for all modes. Everyone would thus trace out the envelope of the neon gain curve. However, since the lasing modes are actually competing for a limited resource – the atoms in the upper lasing state – whenever there are more than one mode present, they have to be nice and share. This is most dramatic when only 2 or 3 modes are present since each one has a large fraction of the total output power. With those, the shapes of the envelopes of the polarized output power curves can be decidedly non-Gaussian. And for Zeeman-split lasers, downright weird. But once the various regions are understood – where there are 1, 2, 3, or more modes competing – then the resulting shapes make more sense:
1 mode: The output power will change smoothly during mode sweep roughly following the profile of the Gaussian neon gain curve (minus the lasing threshold). The only way a real laser could be single mode throughout mode sweep would be either for the cavity to be around 10 cm or less (in which case lasing may cease entirely for a part of mode sweep) or for there to be an additional means of forcing SLM operation (such as an etalon inside the cavity). But slightly longer tubes will operate with a Single mode over a portion of mode sweep with 2 modes for the remainder.
Plot of Mode Sweep of Typical 1 mW Random Polarized He-Ne Laser Tube shows the appearance for a Melles Griot 05-LHR-007, the shortest modern laser tube I’m aware of. Over approximately 50 percent of the mode sweep cycle, it is pure single mode with power sharing during the remainder.
2 modes: When a second mode appears, it will start eating into the power of the first mode. Where the modes are balanced on either side of the neon gain curve, their power will be equal. Between these 2 points, they will share power. The total output power may remain relatively constant or increase slightly when equal (usually up to around 20 percent). Tubes with a cavity length of 12 to 16 cm will operate with 1 or 2 modes.
3 modes: When a third mode appears, it will start eating into the power of the other two. The relative and total power will depend on their location on the neon gain curve and is at the very least, not intuitively predictable. 🙂 Tubes with a cavity length of 20 to 25 cm will operate with 2 or 3 modes during mode sweep.
Plot of Mode Sweep of Typical 3 mW Random Polarized He-Ne Laser Tube shows the appearance for a Spectra-Physics 088 (same as the Melles Griot 05-LHR-088) used in the SP-117/A/B/C and Melles Griot 05-STP-901 stabilized lasers. It is similar a common barcode scanner tube. At the peaks of the polarized modes (minimum for total power), there are 2 modes. Where the polarized modes cross, there are 3 modes. The overall shape of the mode sweep depends on many factors including the exact length of the cavity which determines where it switches from 2 to 3 modes.
4 or more modes: The same general rules apply, but since the contribution of each mode is smaller, the effects of mode competition are also smaller and more difficult to see and interpret.
Inhomogeneous Broadening in Neon and Mode Sweep
The shape of the neon gain curve is by now familiar, but what does it really mean? The popular notion of it being the result of some magical process is fine as a first step, but doesn’t help in attempting to understand how it is affected by wavelength, or for explaining phenomena like the Lamb Dip.
What is really being depicted in the gain curve is a combination of a curve derived from what’s called the “natural line width of neon” which is homogeneously broadened, and the distribution of atomic velocities of excited neon atoms as they translate into a distribution of Doppler shifts in optical frequency.
Ignoring Special Relativity (which is acceptable for the velocities involved), the Doppler shift in optical frequency is equal to the relative velocity of the excited atom divided by the speed of light multiplied by the optical frequency or:
va
Δf = -f0 * ----
c
Where:
Δf is the optical frequency shift.
f0 is the original optical frequency.
va is the velocity of an atom in the upper lasing energy state relative to a photon traveling along the axis of the laser tube.
c is the speed of light.
At any temperature above absolute zero, all atoms are in motion and have a probabilistic distribution of velocities (speed and direction), which all contribute to the Doppler broadening. For a Fabry-Perot (linear) cavity, the photons traveling in either direction “experience” the relative speed of the excited atoms. Stimulated emission will only occur when the Doppler-shifted energy of the photon matches a possible lasing transition of an excited atom. The width of the Doppler broadening is directly proportional to optical frequency, but it is also affected by other factors including temperature and pressure, since these impact the distribution of atomic velocities. The shape of the Doppler broadening curve is then the result of the aggregate of the motion of all the atoms available for stimulated emission. And the width of the inhomogeneously broadened neon gain curve is the width due to homogeneous line-width of neon plus the inhomogeneous Doppler broadening. Since they are added like independent noise souces using the square-root of the sum of the squares, the increase in neon gain bandwidth due to the homogeneous line-width is quite small (just over 5 percent even at 3,391 nm). Thus, the change is close to 1/5th even if the homogeneous part is ignored.
Assuming the FWHM value of 1.6 GHz for the entire inhomogeneously Doppler-broadened gain bandwidth of the common red wavelength of 632.8 nm, at the mid-IR wavelength of 3,391 nm it is only 315 MHz. And at the green wavelength of 543.5 nm it is about 1.86 GHz. The optical frequency difference between cavity modes (c/2L) is only dependent on cavity length and the speed of light. Thus, the number of lasing modes possible for a given cavity length decreases as the gain bandwidth becomes narrower at longer wavelengths.
Note that the lasing modes themselves will have a very narrow bandwidth – possibly as small as 5 kHz or even lower for a laser operating with a single mode. At that point, physical vibrations, laser power supply noise, and other external effects are the limiting factors, not the theoretical minimum bandwidth for the HeNe laser which is under 1 Hz! (Schawlow-Townes linewidth). I originally thought that finding values for the bandwidth of commercial HeNe lasers would be straightforward, but it seems to be near impossible. The only specifications I am aware of from a laser manufacturer are in Laboratory for Science brochures. The best is for their model 220 Ultra Stable HeNe laser, which lists 5 kHz over a period of 1 second. But the value for the type of HeNe laser tube that used to be found in barcode scanners may not be all that much greater if it is mounted to minimize vibrations and driven with a well filtered HeNe laser power supply.
One would expect that with the much smaller gain bandwidth at 3,391 nm of 315 MHz, there would be fewer longitudinal modes oscillating compared to 632.8 nm. Or equivalently, a laser tube would need to be much longer for the same number of modes to fit within the FWHM of 315 MHz. But because of the very high gain at 3,391 nm, the lasing threshold will be lower and thus the effective gain bandwidth of the neon gain curve is going to be wider. I do not know by how much, but with a potential gain over 40 times that of the 632.8 nm transition, it could be very significant. There might even be more modes than at 632.8nm.
Due to the longer wavelength, mode sweep for a laser tube at 3,391nm will have a complete cycle that is over 5 times as long as one at 632.8nm. These same numbers would apply to mode competition at 3,391 nm interfering and stealing power from a 632.8nm laser.
Number of Longitudinal Modes at Other He-Ne Wavelengths
As described above, the gain bandwidth of neon is roughly inversely proportional to the wavelength (or proportion to the frequency) of the lasing transition. However, this assumes that the lasing threshold is at the same location relative to the peak of the neon gain curve, often specified as the Full Width Half Maximum or FWHM. At 632.8nm, this turns out (not coincidentally!) to be reasonable and results in the expected number of lasing modes and mode sweep plots to go along with them.
For very low gain wavelengths like green (543.5nm) and yellow (594.1nm) – which may have 1/10th the gain or less compared to the common red (632.8nm) wavelength, the lasing threshold will be far higher on the roughly Gaussian shaped gain curve, where it is narrower. So, while the FWHM of the neon gain curve may be slightly wider at these wavelengths, fewer modes will be oscillating because of the narrowing due to the higher lasing threshold. However, until the lasing threshold approaches the peak of the gain curve, the reduction in number of modes won’t be that dramatic. And every effort is made to eliminate losses inside the cavity for these low gain lasers, so in fact, the lasing threshold may not even get that high relative to the peak during the expected life of the laser.
For very high gain wavelengths, the reverse will happen. There’s really only one – the mid-IR transition at 3,391nm which behaves more like a solid state laser with a gain over 40 times that of 632.8nm. The lasing threshold will be much lower on the gain curve extending the useful region well out into the tails of the distribution. In this situation, many more modes could end up oscillating than would be accounted for by the much narrower FWHM of the neon gain curve of 315MHz – roughly 1/5th the width compared to 632.8nm. If calculations based solely on this small gain bandwidth were valid, a 75cm 3,391nm laser would have a similar number of longitudinal modes to a 14 cm 632.8nm He-Ne where there are only 1 or 2 active modes at any given time. Since 3,391nm lasers much shorter than 75 cm are commercially available and don’t have dramatic variations in output power with mode sweep, this must not be the case. For example, REO has one with a cavity length of less than 50cm and maximum power variation of 5 percent, which implies that there are several longitudinal modes always present.
1,152 nm (near-IR): TBD. Other than my rebuilt SP-119 laser head, a sample of one of these may be difficult to find. The only thing that can be said about the IR SP-119 is that it is short enough that lasing ceases entirely for a portion of the mode sweep.
1,523 nm (near-IR): Initial testing of a Melles Griot 05-LIR-150 with a cavity length of 34.2 cm and a strategically placed magnet seem to show that its behavior is similar to that of a 632.8 nm laser with a cavity length of 20 or 25 cm. But, the amplitude of the two polarizations are not equal implying that it is probably operating at least in part as a transverse Zeeman laser, which isn’t that surprising given the magnet. However, with 3 strategically placed magnets, the behavior reverts back to what would be expected of a 633 nm tube of 20 or 25 cm with two pure orthogonally polarized modes separated by the longitudinal mode spacing of the tube are present for most of mode sweep with just a hint of a third mode when one is near the center of the neon gain curve. So, it would look like:
Longitudinal Modes of Random Polarized 1 mW IR (1,523 nm) He-Ne Laser
which is the same diagram as
Longitudinal Modes of Typical Random Polarized 1 mW He-Ne Laser
with different numbers.) With my $2 SFPI modified for 1,5XX nm operation (replaced PD with cut-open germanium transistor photodiode), I have confirmed that the modes of the 05-LIR-151 are also similar in number and appearance to those of a 20 to 25 cm 632.8 nm laser. There are 2 modes most of the time with 3 appearing briefly when a mode is close to the center of the gain curve.
3,391 nm (mid-IR): TBD, maybe.
Intensity Stability of He-Ne Lasers
There are at least three kinds of intensity variations present with He-Ne (or other gas) lasers: long term as various longitudinal modes compete for attention, short term due power supply ripple or discharge instability, and beat frequencies between modes that are active.
Common internal mirror He-Ne laser tubes include a specification called “Mode Cycling Percent” or something similar. This relates to the amount of intensity variation resulting from changes in longitudinal modes due to thermal expansion. Typical values range from 20 percent for a small (e.g., 6 inch, 1mW) tube to 2 percent or less for a long (e.g., 15 inch, 10mW) tube. These take place over the course of a few seconds or minutes and are very obvious using any sort of laser power meter or optical sensor. Even the unaided eyeball may detect a 20 percent change. The more modes that can be active simulataneously, the closer those that are active can be to the same output power on the gain curve. Very short tubes or those with low gain (other wavelengths than 632.8nm or due to age/use or poor design) may vary widely in output intensity or even cycle on and off due to mode cycling. (Note that since the polarization for each mode may be different, reflecting the beam of one of these He-Ne lasers from a non-metallic reflective surface (which acts somewhat as a polarizaer) can result in a large variation in brightness as the dominant polarization changes orientation over time.) Trading off between tube size and mode cycling intensity variations is one reason that He-Ne tubes with otherwise similar power output and beam characteristics come in various lengths.
There are also stabilized He-Ne lasers which use optical feedback to maintain the output intensity with a less than 1 percent variation. (They usually also have a frequency stabilized mode but can’t do both at the same time.) An alternative to doing it in the laser is to have an external AO modulator or other type of variable attenuator in a feedback loop monitoring optical output power. See the next section for more info.
Short term changes in intensity may result from power supply ripple and would thus be at the frequency related to the power line or inverter. These can be minimized with careful power supply design.
Intensity variations at 100s of MHz or GHz rates result from beats between the various longitudinal modes that may be simultaneously active in the cavity. For most common applications, these can be ignored since they will be removed by typical sensor systems unless designed specifically to respond to these high beat frequencies.
The common red (633 nm) He-Ne laser, while highly monochromatic, generally does not produce just a single frequency (or equivalently, wavelength) of light. As noted in the section: Longitudinal Modes of Operation, several closely spaced frequencies will generally be active at the same time and their precise values and intensities will change over time. For many applications, this doesn’t matter. However, for others, it makes such a laser useless.
If you have, say, $5,000 to spend, you can buy a red (633nm) He-Ne laser that actually produces a single frequency with specifications guaranteed stable for days and that don’t change over a wide temperature range. While the operation of such a He-Ne laser is basically the same as the one in a barcode scanner (and in fact may use the identical model He-Ne laser tube!), several additional enhancements are needed to eliminate mode sweep and select a single output frequency. Simply constructing the laser cavity of low thermal expansion materials isn’t enough when dealing with distances on the order of a fraction of a wavelength of light! Active feedback is needed. The most common implementation of these lasers starts with a short red (632.8 nm) tube that can only oscillate on at most 3 longitudinal modes. (For technical reasons, stabilized lasers at the other common visible and IR He-Ne wavelengths are more difficult to implement and are much less common. More on this below.) It then adds optical feedback to keep them in a fixed location on the He-Ne gain curve by precisely adjusting the distance between the mirrors over a range of about 1/2 the lasing wavelength. This is most often done with a heating coil (inside or outside the tube), but a PieZo Transducer (PZT, an expensive version of the beeper element in a digital watch) may also be used. The PZT reduces the time for the system to stabilize to a few seconds, compared to up to 30 minutes for the heater. But, for a laser that will be left on continuously, this probably doesn’t matter. Some lasers use a means of cooling in addition to the heater like a piezo fan, probably to allow the laser to run stably over a wider temperature range. And a few including the Melles Griot 05-STP-909/910/911/912 (originally based on the Aerotech Syncrolase 100) use a miniature RF induction heater surrounding the HR mirror mount to control only its length, not that of the entire tube. With direct heating of such a small mass, the response is quite fast. This also makes for a more compact package than a full tube heater.
Many schemes work well and it’s amazing how dirt simple these really are considering their hefty price tags! It’s easy to build perfectly usable systems from a common surplus HeNe laser tube and a few common junk parts.
The common ones are listed below:
Type of Stabilization Technique Variation Precision
-----------------------------------------------------------------------
Normal (multimode) HeNe laser --- ---
Single mode without stabilization 1.5 GHz 3x10-6
Single mode amplitude stabilization 10 MHz 2x10-8
Lamb dip stabilization 5 MHz 1x10-8
Gain peak stabilization 5 MHz 1x10-8
Dual mode polarization stabilization 1 MHz 2x10-9
Second order beat stabilization 200 kHz 4x10-10
Zeeman beat frequency stabilization 100 kHz 2x10-10
External reference (iodine) cell stabilization <5 kHz 1x10-11
External reference (F-P resonator) stabilization <1 Hz 1x10-14
Note that an etalon inside the laser cavity could also be used to select out a single longitudinal mode. For high power lasers which would require long tubes supporting many modes, this would be needed with both the overall mirror spacing and etalon being feedback controlled. But for low power lasers (e.g. 1 to 3 mW), the use of a short tube to limit the number of modes in conjunction with basic feedback control is a much less complex lower cost approach.
Stabilized lasers (or anything that needs to be regulated to some precision) can be classified as two types. The technique is “intrinsic” – basically derived from an internal reference – if what is used to regulate the device is a fundamental property of its construction – the laser physics in this case. It is “extrinsic” if some external reference is used. Most commercial stabilized HeNe lasers are of the first type since they exploit the known and essentially fixed frequency/wavelength and shape of the neon gain curve in the E/M spectrum. Additional techniques may be used to further reduce the uncertainty.
Most common commercial stabilized HeNe lasers are red at 633 nm, partially because of all the available HeNe wavelengths with a single frequency output power of less than 2 mW. Systems like this are both relatively easy to implement and generally useful for a wide range of applications. The approaches usually fall into one of two subclasses:
One or Two Mode stabilized systems: These use random polarized HeNe laser tubes that are short enough that only a few modes will oscillate at the same time. Adjacent modes of a random polarized HeNe laser tube are almost always orthogonally polarized. So, where two modes are oscillating, separate signals corresponding to the amplitude of each mode can be easily obtained by feeding a pair of photodiodes from a polarizing beamsplitter. (If a tube has modes that aren’t orthogonally polarized or that behave strangely, it gets recycled into another application or the dumpster.) The signals may be obtained from the waste beam out of the HR mirror of the laser or by sampling a portion of the output beam. Either one or both of the photodiode signals can then be used for the feedback loop depending on whether intensity or frequency stability is most important. Note that under some conditions, up to 3 or even 4 modes may be permissible in a tube that is to be used for these purposes. More below.
Where the best frequency stability is desired, the ratio of the mode signals (usually made 1:1) is used in the feedback loop. This results in better absolute frequency stability since this ratio is independent of the actual output power, which may change as the tube warms up and ages due to use. With a ratio of 1:1, the two modes are parked equally spaced on either side of the gain curve. Even if the tube oscillates on 3 modes if one is near the center of the gain curve (1 strong one and 2 weak ones), there will only be 2 modes when stabilized. The overall approach is shown below:
Dual-Mode Single-Frequency Stabilized He-Ne Laser
Commercial examples include the Coherent 200, Spectra-Physics 117/A/B/C (and identical Melles Griot 05-STP-901), REO SHL. Axsys/Teletrac 150, and many others.Some inexpensive (this is relative!) stabilized HeNe lasers only use a single mode for frequency locking. When on the slope, this will be reasonably stable after warmup once the output power has reached equilibrium.
When the best intensity stability with a polarized output is desired, the signal from a single mode (one photodiode channel) is compared to a reference voltage and this becomes the error signal in a feedback loop to put its mode near the center of the gain curve. Even if the tube oscillates on up to 4 modes if there are two on either side of the gain curve, with one near the center of the gain curve when stabilized, there will be at most 2 weaker modes on the tails of the gain curve. Since these will be orthogonally polarized to the dominant center mode, they can be blocked by the output polarizer. The overall approach is shown below:
Dual-Mode Single-Frequency Stabilized He-Ne Laser
Commercial examples include the Spectra-Physics 117A (and identical Melles Griot 05-STP-901), and REO SHL.
When the best intensity stability of the total output (without regard to polarization) is desired, a non-polarizing beam sampler is used or the signals from the two photodiode channels are summed and compared to the reference. I am not aware of any commercial lasers using this approach.
Zeeman split systems: A magnetic field is used to create a pair of lasing modes that differ from each other by a relatively small frequency. The stable optical frequency along with the Zeeman difference frequency are used for a variety of metrology applications. These may be classified as either axial or transverse based on the orientation of the magnetic field:
Axial: Like the single mode systems described above, the tube length is such that only a single longitudinal mode will oscillate. However, a powerful axial magnetic field splits this single mode into two sub-modes with counterrotating circular polarization states. When passed through a polarizer at the output, this results in a beat frequency in the 100s of kHz to several MHz range (depending on the magnetic field strength and other factors) which may be used to derive the stabilization feedback signal and is also key to the measurement technique for which these are designed. The overall approach is shown below:
Dual-Mode Stabilized Axial Zeeman-Split Dual-Frequency He-Ne Laser.
Commercial examples include the HP/Agilent 5501B, 5517, 5518A, and 5519A/B (though the heater is actually *inside* the tube for these); Excel 1001; Zygo 7705; and others.
Transverse: Like the two mode systems described above, the tube length is such that a pair of modes can oscillate when straddling the gain curve but only a single mode when at the peak. A moderate transverse magnetic field in conjunction with the natural birefringence of the mirror system results in a beam frequency in the 10s to 100s of kHz range. Since the beat frequency varies slightly with the mode position, it may be used in a PLL feedback loop for frequency stabilization. One example is the Laboratory for Science model 220.
Most commercial stabilized He-Ne lasers for general laboratory applications are of type (1) and operate with 2 orthogonal modes for frequency stabilization, though some use 1 mode for intensity stabilization (or can select between them with a switch). (Regardless, only a single longitudinal mode – thus a single optical frequency – may be allowed to exit the laser, the other being blocked with a polarizer.) These include the Coherent 200, Spectra-Physics 117 and 117A (and the identical Melles Griot 05-STP-901), many from Zygo, and various models from REO, Thorlabs, and others. For example, in the Melles Griot 05-STP-901 frequency and intensity stabilized He-Ne lasers (no longer in production), the laser cavity permits a pair of orthogonal polarized longitudinal modes to be active and can provide very precise control by straddling these on either side of the gain curve (frequency stabilized mode) or a single longitudinal mode that is also used for the output on one side of the gain curve (intensity stabilized mode). Those from other companies are generally similar.
All the interferometry lasers manufactured by Agilent (formerly Hewlett Packard), Excel, and one model from Zygo (the 7705) are of type (2). While lasers from Teletrac/Axsys, Optodyne, Renishaw, and others are type (1).
And there are hybrid approaches. For example, the Zygo 7701/2/12/14 lasers generate and lock a single frequency via dual mode stabilization, But it is split into two using an Acoutso-Optic Modulator (AOM) rather than the Zeeman effect.
For some photos of the (quite simple) Zeeman split stabilized He-Ne tube used in the Hewlett-Packard 5517 laser head, see the Laser Equipment Gallery (Version 1.86 or higher) under “Assorted Helium-Neon Lasers”. And for more information on these lasers, see the sections starting with: Hewlett-Packard/Agilent Stabilized HeNe Lasers.
It isn’t really possible to convert an inexpensive HeNe tube that operates on many longitudinal modes into a single frequency laser. Adding temperature control could reduce the tendency for mode hopping or polarization changes, and the addition of powerful magnets can force a polarized beam. But, selecting out a single longitudinal mode would be difficult without access to the inside of the tube. However, if the HeNe tube is short enough that the mode spacing exceeds about 1/2 the Doppler-broadened gain bandwidth for neon (about 1.5 GHz), it will oscillate on at most 2 longitudinal modes at any given time and these will each be linearly polarized and usually orthogonal to each-other. Then, stabilization is possible using very simple hardware. In fact, even if the mode spacing is a bit smaller – down to 500 or 600 MHz – then only 2 modes will be present most of the time but 3 may pop up if one is close to the center of the gain curve. This, too, is an acceptable situation since the tube can be stabilized with the modes straddling the gain curve and then only 2 modes will oscillate. For intensity stabilization, 4 modes may even be permitted. Note that while the modes of a random polarized and linearly polarized tube are similar (except for polarization), a random polarized tube is desirable to be able to use a tube that supports 2 modes with the benefits they provide, while being able to eliminate the second mode from the output.
It may be possible with a combination of what can be done externally, as well as control of discharge current, to force a situation where gain is adequate for only 1 or 2 modes even for a longer tube. Whether this could ever be a reliable long term approach for a HeNe tube that normally oscillates in many longitudinal modes is questionable. What I don’t think will have much success are optical approaches such as feeding light back in through the output mirror. Doing this would likely have the exact opposite of the desired effect but may work in special cases (it’s called injection locking and is used with great success for other applications).
Coherent, Melles Griot, Spectra-Physics, and others will sell you a small stand-alone stabilized HeNe laser for $5,000 or so and Agilant (HP) and others have interferometers and other similar equipment which includes this type of laser (and are even more expensive!). Other manufacturers includ Zygo, Teletrac, Nikon, Micro-g Solutions, SIOS, NEOARK, and REO. The lab lasers that I’ve seen all use short HeNe tubes with thermal feedback control of the resonator length and all operate at the red HeNe wavelength (632.8xxxxxx nm to 8 or more significant figures). The Spectra-Physics model 117A/118A laser actually uses a lowly SP088-2 tube similar to those in older grocery store barcode checkout scanners as its heart. A tube like this is visible below:
Spectra-Physics Model 117 OEM Stabilized He-Ne Laser Assembly
However, some do employ a custom tube with the heater inside to greatly speed up response and reduce heat dissipation to the outside. A stabilized HeNe laser for green or other color visible HeNe wavelength or one of the IR wavelengths is also possible using the same techniques.
As noted above, the actual stabilization mechanism for the general purpose stabilized lasers may be the ratio of amplitudes of two longitudinal modes (which is better for frequency stabilization) or the amplitude of one mode (which is better for intensity stabilization). These are usually stable to within a few parts in 109. However, the frequency drift when intensity stabilized is still not much – probably less than 1 part in 108. Output power variation may be 0.2 percent if intensity stabilized and 1 percent if frequency stabilized. Some allow either method to be selected via a switch, as well as providing for an external tuning input to vary the frequency over several hundred MHz. (However, due to the thermal control most often used, the response time is not exactly fast.)
The Zeeman split interferometer lasers may lock the difference frequency to a crystal clock, though most seem to use the basic polarized modes for stabilization, with the Zeeman beat used only as the reference for the interferometer. A few do lock the Zeeman frequency to a PLL. One of these was the Laboratory for Science Model 220. (Laboratory for Science is now out of business).
More sophisticated schemes with even better precision and lower long term drift may lock to the “Lamb Dip” at the center of the neon gain curve or to one of the hyperfine absorption lines of an iodine vapor other type of gas cell, achieving stabilities on the order of 1 part in 1010 or even better.
Due to the performance, simplicity, reliability, and relatively low cost of stabilized HeNe lasers, they are still often the preferred frequency reference for many applications. As noted, a typical system might go for $5,000. While this may seem high, it is small compared to many other technologies. The cost is not the result of expensive components or complex manufacturing, but more to the relatively limited number of units produced. If stabilized HeNe lasers were as popular as laser pointers, they would probably cost under $100
Digital Control of Stabilized He-Ne Lasers?
These types of lasers have been designed using simple analog techniques for over 35 years. So why change? A few op-amps, a monostable or two, and a handful of discrete parts is sufficient for any conceivable level of performance in a mode-stabilized HeNe laser. There are at most two signals that need to be monitored (the polarization modes) with the objective of maintaining them equal or in a fixed ratio. Yet, I’ve seen at least 3 examples of dual polarization mode stabilized He-Ne lasers that have gone from a simple analog approach to a much more complex digital approach, apparently with no obvious technical justification:
HP/Agilent 5517: Xylinx or similar FPGA.
Zygo 7702: Motorola 68HC11 microprocessor.
Teletrac/Axsys: Microchip PIC16C73A-20/SP PIC.
All are basic mode stabilized He-Ne lasers. The 5517 is a Zeeman-split laser but the stabilization is mode-based.
The redesign in each case must have cost a fortune. Since none of these lasers had many adjustments in their analog designs, ease of manufacturing is probably not the justification. And there is no need for preventive maintenance as components age – lasers like this will run for years on-end without any adjustments. Cost of components is also not a viable excuse as jelly bean op-amps and other common parts are adequate for any of these lasers. Nor do any require an external computer interface like more complex lasers.
However, one obvious benefit from the company’s point of view is serviceability, or lack thereof for anyone not supported by the manufacturer. The new designs are virtually impossible to troubleshoot and repair without detailed service information, and possibly support software. Unless the problem is obvious like a broken wire or blown fuse, attempting to find an electronic fault in these high density surface mount PCBs controlled by firmware programs is just about impossible. And Marketing can promote the “benefits” of digital technology, as bogus as that may be here. If anything, the additional electrical noise from digital signals is a detriment. Digital has to be better, right? 🙂
Iodine Stabilized He-Ne Lasers
Unlike the more common He-Ne stabilized lasers like those that lock to some intrinsic feature of the lasing process like the neon gain curve, an Iodine Stabilized HeNe Laser (ISHL) uses a external gas cell containing iodine vapor, so that a line in the iodine absorption spectrum is used as the reference wavelength. In principle, this provides an improvement in long term wavelength accuracy of 1 to 2 orders of magnitude – down to 0.1 parts per billion, corresponding to a few 10s of kHz – or better.
An ISHL operating on the common red (633 nm) wavelength consists of a He-Ne laser tube with one or two Brewster windows, a gas cell containing iodine at low pressure, and at least one external mirror on a PieZo Transducer (PZT) for fine cavity length control. The iodine cell needs to be installed inside the laser cavity to benefit from the high intra-cavity circulating power as the sensitivity in the vicinity of 633 nm is very low. However, when operating on the green (543.5 nm) wavelength, the cell can be external despite the lower power generally achievable with green, because the sensitivity is higher.
The basic principles of operation for an ISHL are rather straightforward: The iodine (or actually I2) has a very complex absorption spectra with hundreds of absorption lines. A very small portion of it is shown below:
Iodine Absorption Spectrum Near 532 nm
By dithering the laser cavity length via a PZT, a lock-in amplifier (also known as a phase sensitive detector or synchronous demodulator) can maintain the wavelength at the very center of any selected absorption peak (or dip, depending on your point of view!). The challenging part is to be able to reliably select a specific absorption line to lock to. So, although locking to a given line is fairly simple, the overall electronics can get to be quite complex if automatic line selection is desired, though nowadays, an embedded microcomputer does the line selection.
Here are some photos of an iodine stabilized laser based on the classic NIST (National Institute of Standards and Technology, formerly the National Bureau of Standards) design originally described in the paper: Howard P. Layer, “A Portable Iodine Stabilized Helium-Neon Laser, “IEEE Trans. on Inst. and Meas, IM-29, pp358-361, 1980. The photos are actually of two different samples of the NIST design. The first one is of a complete laser head while the others are of a physically similar resonator only where it’s easier to see the individual components.
Iodine Stabilized He-Ne Laser Head
The overall appearance is unremarkable with a shutter at the front (the round black thing) and several cables coming out the back (hidden). Leveling “feet” would often be installed be installed in the cast tabs for precise alignment. It is not known if this was a commercial product or built by NIST or perhaps even Hewlett Packard based on the NIST design. But there was an Agilent inventory sticker on the cover, so perhaps this very laser was used to certify HP/Agilent metrology lasers like the 5517A! 🙂 In fact, the base of this laser bears a striking resemblence to the 5517A (though the dimensions don’t match). It’s a combination of a cast and machined assembly, clearly not made for a one time research project. It may in fact be a Frazier Model 100 FISL (or the NIST version they copied) as the head looks identical to the Frazier laser down to the pattern of holes in its cover. 🙂
Iodine Stabilized He-Ne Laser Head With Cover Removed
The glow of the Melles Griot 05-LHB-290 two-Brewster HeNe laser tube can be seen within the resonator structure.
The resonator is a rather massive metal structure about 18 inches long.
Iodine Stabilized HeNe Laser Resonator – Visible Portion of Two-Brewster He-Ne Laser Tube
Most of the Melles Griot 05-LHB-290 two-Brewster tube is hidden, but it is mounted via compression O-ring fittings with the high voltage supplied via the BNC connector. The gray blobby thing houses the ballast resistors.
Iodine Stabilized HeNe Laser Resonator – Visible Portion of Two-Brewster He-Ne Laser Tube
The iodine cell is mounted via compression O-ring fittings between the two-Brewster HeNe laser tube and one of the mirrors. The gold connectors (1 of 2 are visible) are for temperature control of the iodine cell, and possibly a photodiode for monitoring the fluorescence.
Iodine Absorption Cell Showing Fluorescence From Green He-Ne Laser Beam
This shows the same iodine cell having been removed from the ISHL resonator, being excited by a separate green HeNe laser. The yellow-green (with some red) fluorescence inside the iodine cell means some green light is being absorbed and would show up as a reduction in transmitted beam power. (Fluorescence from a 633 nm beam would be in the IR and boring.)
Iodine Stabilized He-Ne Laser Resonator – Photodiode and Beam Sampler
This has an angled plate to provide a small portion of the output beam to a silicon photodiode. Both mirrors are mounted on PZTs for cavity length control and dither (though it’s not clear why a single PZT wouldn’t suffice for both functions).
Although the laser head does not presently lase, I am hopeful that it will someday. The discharge color of the HeNe laser tube is normal and there is no visible brown crud in the bore indicating that it should be healthy. The iodine cell still has iodine in it based on its response to a green (532 nm) DPSS laser pointer beam. This thing has probably been sitting on a warehouse for years, if not decades (next to the lost Ark), so the non-lasing condition isn’t exactly a surprise. However, there seemed to be some type of contamination inside one of the B-windows. So, it may require a replacement 05-LHB-290. I do have one that lases, though it’s a bit weak. However, the NIST paper states that the reflectivity of the OC mirror is only 93 percent, presumably to force single longitudinal mode operation by reducing gain, but this also dramatically reduces output power. And the tube would need to be quite healthy to lase at all. Replacing that mirror with a 99 percent OC might be an option. Then mirror alignment or some other means could be used to force SLM. It would seem like a more logical solution to force SLM would be to add a PZT-controlled etalon that tracks cavity length tuning. Then, the output power would be close to the maximum available from the tube – 5 to 10 times higher than this design produces. But I’ve not seen that anywhere. The paper also states that the laser tube and cavity are 20 and 30 cm long, respectively. On my samples, they are at least 25 and 35 cm. And, their laser tube appears to not be a Melles Griot 05-LHB-290. So perhaps the original prototype was not identical to the versions later reproduced by Frazier (and others), though it’s quite clear that Frazier copied nearly every aspect of the laser design down to the controller-in-a-scope and its front panel layout and labeling. 😉
And multi-wavelength iodine stabilized He-Ne laser have also been built. See: “A Tunable Iodine Stabilized He-Ne Laser at Wavelengths 543 nm, 605 nm, and 612 nm”, J. Hu, T. Ahola, K. Riski, and E. Ikonen, Digest of the 1998 Conference on Precision Electromagnetic Measurements, July 6-10, 1998, IEEE Cat. No. 98CH36254. This one used the tube from a PMS/REO LSTP-1010 5 color tunable HeNe laser with a pair of PieZo Transducers (PZTs) behind the rear mirror (tuning prism) and a lock-in amplifier for feedback control. For these wavelengths, the iodine cell can be outside the cavity, but notice that the red wavelength, 633 nm, is not included. Multi-Wavelength Iodine Stabilized HeNe Laser
The only modification to the laser itself was to add a pair of PZT cylinders between the back of the tuning prism and its mount so that the cavity length could be tuned electronically. The iodine cell and laser power detector are external to the cavity.
What I found curious with this (as well as the NIST laser) is that the laser cavity is way too long to restrict the laser to single longitudinal mode operation as would be required for the system to be useful. The authors of the paper don’t appear to address this, nor have I found it mentioned elsewhere.
So I performed a quick experiment using a REO tunable HeNe laser. As expected, with the power in each wavelength maximized, there are multiple longitudinal modes oscillating. And also as expected, there would be a range of the mode sweep cycle where the output would be pure SLM if either the Wavelength Selector or Transverse adjustment were set so as to reduce output power below a specific value, differing for each wavelength as follows:
These values are very approximate and don’t necessarily mean that the laser can be tuned over any significant range and remain SLM as is required to be useful to lock to an I2 line – that would require even lower power. The 543.5 nm SLM power may be somewhat higher than 240 µW but that’s as much as my laser wanted to put out at the time. It would appear that 594.1 nm would be a very usable wavelength at higher power, but apparently the authors did not find a suitable I2 absorption transition at that wavelength, or at 632.8 nm either. The latter is rather strange as we know that there are more than a half dozen suitable I2 lines within the normal 632.8 nm gain bandwidth to which the Frazier and NIST lasers can be locked.
The NIST (and presumably Frazier) ISHLs use an OC reflectance of only 93 percent to raise the lasing threshold and force SLM operation. (Common red HeNe lasers of this size typically have an OC reflectance of 99 percent.) This option is not available for the multi-wavelength ISHL since the authors used a stock PMS/REO tunable laser tube which has a relatively high reflectance (much greater than 99 percent) internal OC.
Assuming this analysis with respect to usable SLM power to be correct, it does explain why direct locked ISHLs typically have very low power. To achieve higher power, some companies offer what is known as an “offset-locked iodine stabilized HeNe laser”. With these, a normal SLM HeNe laser with a typical output power of 1 to 2 mW (at 632.8 nm) has its optical frequency phase locked to the lower power ISHL. Implementation is actually easier than it sounds but nonetheless is left as an exercise for the motivated student. 😉
Stabilized He-Ne Lasers at Other Wavelengths
All types of schemes for stabilizing red (633 nm) He-Ne lasers have been developed, but most of those that are commonly used in commercial stabilized He-Ne tubes are based on monitoring of one or both polarized modes in the output or waste beams and locking their position to the neon gain curve. For well behaved so-called “random polarized” 633 nm HeNe laser tubes, adjacent modes are generally orthogonally polarized. So, to assure a single mode (single frequency) output, the tube simply has to be short enough that at the lock position, either one mode or two polarized modes are present. In the latter case, a polarizer at the output can block the unwanted mode.
While it might be assumed that exactly the same approach could be taken for “other color” lasers, this turns out not usually be the case. The principle reason is that the nice behavior that has been counted on to keep the lasers well mannered may not be present. So while the tube will still have a pair of orthogonal axes of polarization, adjacent longitudinal modes will not necessarily be orthogonal and/or even have a consistent relative polarization – they may flip like a banshee.
So, where it is desired to implement a stabilized HeNe laser at other wavelengths (visible or IR), the polarization may be the primary issue, but there are a number of other complications including differences in the neon gain bandwidth and generally much lower power:
Orthogonal polarization: For the 633 nm HeNe laser, the Physics has cooperated (or Murphy took a millisecond off) with adjacent modes being orthogonally polarized. Since this is not necessarily true at other wavelengths, the use of a short tube may be required so that only a single mode is permitted at the lock point. For example, to assure that only a single mode can oscillate at 543.5 nm would require a tube less than about 12.5 cm in length, which would have an extremely low output power if it could be made to work at all – probably well under 0.1 mW.
Neon gain bandwidth: The width of the inhomogeneously-broadened neon gain curve depends on optical frequency and is roughly equal to [633 nm /(Lasing Wavelength) * 1.6 GHz + 100 MHz] where the addition uses the sum of the squares. For most purposes, Doppler broadening dominates and the added 100 MHz term can be ignored since its contribution will be small. Thus, the length of the tube must be selected based on wavelength to assure that only the desired number of longitudinal modes can oscillate. Of course, this may directly conflict with the need for output power! For example, at 633 nm, a tube with a cavity length of 225 mm (667 MHz mode spacing) will allow at most 3 longitudinal modes to oscillate. At 1,523 nm, the gain bandwidth will less than 1/2 of what it is at 633 nm and may be insufficient for even 2 modes to see enough gain, resulting in the output actually going off during part of mode sweep.However, FWHM or other definition of the gain bandwidth has to be adjusted depending on the actual gain and losses of the tube. For example, the mid-IR 3,391 nm line has a gain over 40 times that of the 633 nm red line, so the lasing threshold will be much lower effectively widening the gain curve. And the gain at 544 nm (green) is roughly 1/20th of that at 633 nm.
Power output: The gain and/or efficiency for most of the non-red wavelengths is much lower than for 633 nm. Normally, this can be handled using a longer tube. But that directly conflicts with (1) for the green (543,5 nm), yellow (594.1 nm), and orange (604.6 or 611.9 nm) wavelengths since these tubes need to be shorter than even for red.
Various tricks may be used to stabilize HeNe lasers at other wavelengths but in general, it’s often not as easy! Also see the section: A Stabilized HeNe Laser at 1,523 nm.
Back-Reflections and HeNe Lasers
Back-reflections of a laser’s output directly back to it is inherently destabilizing for most lasers, and in some cases even potentially destructive. Many factors determine what effects back-reflections will have including the type of laser, and optics between the laser cavity (inside the laser or external) and the source of the reflections.
HeNe lasers are particularly sensitive to back-reflections, though no damage is ever likely to occur. However, the instantaneous polarization state and amplitude of the longitudinal modes will be affected. These effects may not be noticeable for common HeNe lasers without using fancy instruments since they occur at nanosecond time scales. For these lasers, average output power from the laser will not be affected but for random-polarized HeNe lasers, the intensity of any portion of the beam passed through optics that affect polarization may fluctuate dramatically.
Suffice it so say that one should avoid back-reflections to HeNe lasers, but especially for stabilized HeNes. Even the reflection from a piece of fresh transparent tape in the beam may cause the laser to lose lock. What happens is that when a mode swaps polarization, the controller will attempt to relock but that may require several seconds or longer. Some lasers may indicate their unhappiness by flashing the READY or LOCK indicators, or in the case of the Spectra-Physics 117A and Melles Griot 05-STP-901, making clicking noises. 🙂
The best way avoid such instabilities is to arrange the setup so that there are no back-reflections. 😉 The HP/Agilent interferometer configurations used for metrology applications shown in Most Common Hewlett Packard/Agilent Interferometers are nearly perfect. With their high quality Polarizing Beam-Splitters (PBSs), there are virtually no back-reflections directly to the laser. The next best solution where this is unavoidable is to add an optical isolator at the output of the laser. A Faraday isolator is best but very expensive. For a beam with a single linear polarization, adding a PBS cube and Quarter Wave Plate (QWP) will redirect any reflections downstream that have not had a polarization change off to the side. In many applications, this is sufficient. But in some cases, two Faraday isolators in series are needed to fully tame the HeNe beast. 😉
Reverse Incremental Efficiency of HeNe laser?
You say: “Huh, what?”. 😉 Until recently, it never occurred to me to even think about how the HeNe lasing process and electrical input might be related other than that the HeNe laser is extremely inefficient. Then someone asked the obvious question: “Does the power input to the laser depend on the output power in the beam?”. With a bit of thought, it should be obvious for there to be some relationship. But even for other types of lasers, this is not something that is often considered. The slope efficiency is an important measurement for any laser, being how the laser output changes as a function of the electrical (or other) input. For example, with a laser diode, all that is needed is to measure the input electrical power and output optical power at two points where lasing is occurring and calculate the ratio of the differences. But this is from input to output. For a HeNe laser, such measurements can be done over a portion of the range where the power supply is stable resulting in a typical value of 0.3 mW/W or 0.3 percent, similar to the pathetic absolute efficiency for the HeNe laser!
But what we want here is the opposite – how the input power is affected by the laser output, which I’ll call the “Reverse Incremental Efficiency” or RIE. In other words, compare the input power with the laser operating normally and with the output suppressed, for example, by misaligning a mirror. For a HeNe laser, would there be a detectable change in input power if this were done? With a normal constant current HeNe laser power supply, the result should be a change in tube voltage. If for want of a better term, the “reverse slope efficiency” were 100 percent, then “spoiling” the beam of a 1 mW laser should result in a reduction of 1 mW in power consumed by the tube.
So I did an experiment using a high-mileage JDS Uniphase 1145P laser head with a Melles Griot 05-LPL-915 power supply set at 6.5 mA. The lasing was spoiled using a tube-type Nylon mirror adjuster pushing on the OC mirror mount to kill lasing in a totally reversible manner. Measurements were made while the laser was warming up and outputting 12 mW and then once fully warmed up and outputting 19 mW. The results were rather intriguing:
ΔPo ΔVt ΔPt RIE
------------------------------------
12 mW 4.1 V 26.65 mW 45.0%
19 mW 5.2 V 33.80 mW 56.2%
ΔPo is the output power, ΔVt is the change in tube voltage from 0 mW to ΔPo, and ΔPt is the corresponding change in the tube’s power consumption.
At first, my measurements were made with a DMM with only 4 digits of resolution and it appeared as though the the RIE might be exactly 50 percent, which could have had some cosmic significance. 🙂 But it wasn’t to be. With the full 5 digits of a Fluke 87, while the RIE isn’t far from 50 percent, it isn’t 50.00000000%. Too bad. But what this does say is that the incremental efficiency of getting coherent photons out the front of a HeNe laser once it’s running at the normal voltage and current and outputting near rated power is order of 50 percent, not a miniscule value like that 0.3 percent! Note that the results depend on whether the laser is running at reduced and full power. If this had been some obscure effect of mechanical stress on the discharge voltage, then the change in tube voltage would be about the same at both output powers. And pushing on the mirror mount beyond where lasing ceases has no effect on tube voltage. At least until it breaks off. 🙂
To further confirm that this is a true lasing effect, I repeated the experiment with a Melles Griot 05-LHB-570 one-Brewster laser where lasing could be suppressed simply by poking something in the cavity between the tube and OC mirror:
Even at this much lower output power, the RIE is still fairly high, though uncertainly is greater due to the much lower power and corresponding change in tube voltage.
Then, I did multiple sample points while a like-new 1145P head was warming up:
ΔPo ΔVt ΔPt RIE
------------------------------------
6 mW 4.8 V 32.1 mW 21.0%
10 mW 5.7 V 37.1 mW 27.0%
14 mW 5.8 V 37.7 mW 37.1%
17 mW 6.0 V 39.0 mW 43.6%
19 mW 6.3 V 41.0 mW 46.3%
21 mW 6.3 V 41.0 mW 51.3%
24 mW 6.4 V 41.6 mw 58.0%
Just when I thought this was making some sense, these data appear to show an unexpected very non-linear relationship. Most of the voltage change occurs between 0 mW a few mW, and it is then nearly constant, perhaps due to the gain saturating. There is still significant uncertainty as the measured values for both absolute tube voltage and the voltage difference fluctuate over time.
And finally on the same head when fully warmed up with a stable 24 mW of output power undisturbed, with controlled misalignment of the OC mirror to generate a few intermediate values:
ΔPo ΔVt ΔPt RIE
------------------------------------
1 mW 1.3 V 8.5 mW 12.0%
6 mW 4.4 V 26.8 mW 21.0%
9 mW 5.2 V 34.5 mW 26.1%
24 mW 6.3 V 41.0 mW 58.6%
"" mW 6.5 V 42.3 mW 56.8%
"" mW 6.8 V 44.2 mW 54.3%
These are generally similar to the measurements during warmup. The last two full power entries reflect the variation that may be present even when the laser is in thermal equilibrium. Even so, there can be small changes in the longitudinal mode positions and thus relative efficiencies of the lasing lines or something. 🙂
A reference to this phenomenon can be found on page 38 of an old NASA report: An Experimental and Theoretical Investigation of Striations in a HeNe Laser. (If this link should decay, simply search for the title.) I’m sure there are many more in depth studies but locating them is left as an exercise for the student. 🙂
On-line Introductions to HeNe Lasers
There are a number of Web sites with laser information and tutorials.
One of the best so far is the CORD Laser/Electro-Optics Technology Series, Cord Communications, 324 Kelly Drive, P.O. Box 21206, Waco, Texas 76702-1206.In particular:
Module 1-10 Helium-Neon Gas Laser–A Case Study goes into considerable detail on the theory as well as some more practical information related to HeNe lasers.
Module 3-1 Power Sources for CW Lasers deals with HeNe laser power supplies.
Module 4-2 Gas Laser Power Supplies has more on HeNe laser power supplies (some redundancy with Module 3-1).
See the section: On-Line Introduction to Lasers for the current status and on-line links to these courses, and additional CORD LEOT modules and other courses relevant to the theory, construction, and power supplies for these and other types of lasers.
The HeNe Laser Manual by Elden Peterson of Voltex, Inc. has a variety of practical information on HeNe lasers including characteristics and power supply considerations. This is a nice concise treatment of the practical aspects of HeNe lasers and power supplies and recommended for those who would like the “short course” before (or in place of) diving in head-first to the material that follows. 🙂 There is also: “HeNe Lasers: Their Quirks and Quarks” by Keith Schmidt, referenced in this manual, which I haven’t seen but sounds interesting.
MEOS GmbH was a developer of laser educational materials and equipment (among other things) but now appears to be gone for good. They had the lab/study manuals for their courses on a wide variety of laser related topics. While designed to be used in conjunction with the laboratory apparatus which they sell, these manuals include a great deal of useful information and procedures that can be applied in general.As of Summer 2012, MEOS has stopped development and support of these kits. (In fact, the company doesn’t seem to exist anymore, at least not doing anything remotely related to photonics.) However the creator of the experiments and author of the manuals has been acquired by LD Didactic (Leybold) and is continuing this line, which is represented by Klinger in US. The updated manuals are now available for free download at the Leybold Ld Didactic Web Site.Several modules would be of particular interest for HeNe lasers. Unfortunately, the on-line manuals (in PDF format) have disappeared from the MEOS Web site. But I have found and archived most of MEOS manuals. (The ones above may be slightly different.)
1979-1980 Metrologic Catalog and Laser Handbook had general information on how a HeNe laser works and details of HeNe laser tube fabrication on pages 34 to 39. The manufacturing process is for Metrologic’s “hard-seal metal ceramic” HeNe laser tubes which never caught on and were discontinued after a few years, but is interesting nontheless.
As with *any* laser, proper precautions must be taken to avoid any possibility of damage to vision. The types of He-Ne lasers mostly dealt with in this document are rated Class II, IIIa, or the low end of IIIb (see the section: Laser Safety Classifications. For most of these, common sense (don’t stare into the beam) and fairly basic precautions suffice since the reflected or scattered light will not cause instantaneous injury and is not a fire hazard.
However, unlike those for laser diodes, He-Ne power supplies utilize high voltage (several kV) and some designs may be potentially lethal. This is particularly true of AC line powered units since the power transformer may be capable of much more current than is actually required by the He-Ne laser tube – especially if it is home built using the transformer from some other piece of equipment (like an old tube type console TV or that utility pole transformer you found along the curb) which may have a much higher current rating.
The high quality capacitors in a typical power supply will hold enough charge to wake you up – for quite a while even after the supply has been switched off and unplugged. Depending on design, there may be up to 10 to 15 kV or more (but on very small capacitors) if the power supply was operated without a He-Ne tube attached or it did not start for some reason. There will likely be a lower voltage – perhaps 1 to 3 kV – on somewhat larger capacitors. Unless significantly oversized, the amount of stored energy isn’t likely to be enough to be lethal but it can still be quite a jolt. The He-Ne tube itself also acts as a small HV capacitor so even touching it should it become disconnected from the power supply may give you a tingle. This probably won’t really hurt you physically but your ego may be bruised if you then drop the tube and it then shatters on the floor!
However, should you be dealing with a much larger He-Ne laser, its power supply is going to be correspondingly more dangerous as well. For example, a 35 mW He-Ne tube typically requires about 8 mA at 5 to 6 kV. That current may not sound like much but the power supply is likely capable of providing much more if you are the destination instead of the laser head (especially if it is a home-made unit using grossly oversized parts)! It doesn’t take much more under the wrong conditions to kill.
After powering off, use a well insulated 1M resistor made from a string of ten 100K, 2 W metal film resistors in a glass or plastic tube to drain the charge – and confirm with a voltmeter before touching anything. (Don’t use carbon resistors as I have seen them behave funny around high voltages. And, don’t use the old screwdriver trick – shorting the output of the power supply directly to ground – as this may damage it internally.)
And only change electrical connections or plug/unplug connectors with power OFF, being aware of the potential for stored charge. In particular, the aluminium cylinder of some HeNe laser heads is the negative return for the tube current via a spring contact inside the rear end-cap. So, pulling off the rear end-cap while the laser is powered will likely make YOU the negative return instead! You will probably then bounce off the ceiling while the laser bounces off the floor, which can easily ruin your entire day in more ways than one. 🙁 🙂 This connection scheme is known to be true for most JDS Uniphase and many Melles Griot laser heads, but may apply to others as well.
Now, for some first-hand experience:
(From: Doug (dulmage@skypoint.com).)
Well, here’s where I embarrass myself, but hopefully save a life…
I’ve worked on medium and large frame lasers since about 1980 (Spectra-Physics 168’s, 171’s, Innova 90’s, 100’s and 200’s – high voltage, high current, no line isolation, multi-kV igniters, etc.). Never in all that time did I ever get hurt other than getting a few retinal burns (that’s bad enough, but at least I never fell across a tube or igniter at startup). Anyway, the one laser that almost did kill me was also the smallest that I ever worked on.
I was doing some testing of AO devices along with some small cylindrical HeNe tubes from Siemens. These little coax tubes had clips for attaching the anode and cathode connections. Well, I was going through a few boxes of these things a day doing various tests. Just slap them on the bench, fire them up, discharge the supplies and then disconnect and try another one. They ran off a 9 VDC power supply.
At the end of one long day, I called it quits early and just shut the laser supply off and left the tube in place as I was just going to put on a new tube in the morning. That next morning, I came and incorrectly assumed that the power supply would have discharged on it own overnight. So, with each hand I stupidly grab one clip each on the laser to disconnect it. YeeHaaaaaaaaa!!!!. I felt like I had been hid across my temples with a two by four. It felt like I swallowed my tongue and then I kind of blacked out. One of the guys came and helped me up, but I was weak in the knees, and very disoriented.
I stumbled around for about 15 minutes and then out of nowhere it was just like I got another shock! This cycle of stuff went on for about 3 hours, then stopped once I got to the hospital. I can’t even remember what they did to me there. Anyway, how embarrassing to almost get killed by a HeNe laser after all that other high power stuff that I did. I think that’s called ‘irony’.
Comments on HeNe Laser Safety Issues
(Portions from: Robert Savas (jondrew@mail.ao.net).)
A 10 mw HeNe laser certainly presents an eye hazard.
According to American National Standard, ANSI Z136.1-1993, table 4 Simplified Method for Selecting Laser Eye Protection for Intrabeam Viewing, protective eyewear with an attenuation factor of 10 (Optical Density 1) is required for a HeNe with a 10 milliwatt output. This assumes an exposure duration of 0.25 to 10 seconds, the time in which they eye would blink or change viewing direction due the uncomfortable illumination level of the laser. Eyeware with an attenuation factor of 10 is roughly comparable to a good pair of sunglasses (this is NOT intended as a rigorous safety analysis, and I take no responsibility for anyone foolish enough to stare at a laser beam under any circumstances). This calculation also assumes the entire 10 milliwatts are contained in a beam small enough to enter a 7 millimeter aperture (the pupil of the eye). Beyond a few meters the beam has spread out enough so that only a small fraction of the total optical power could possible enter the eye.
Here’s a quick teardown of an ignition transformer, used on gas fired ovens & hobs. This unit takes mains 240v AC & uses a transformer to step the voltage to several kV, at a low current to ignite the burners.
Bottom
The transformer section is completely potted in Epoxy resin for insulation, but the driver circuitry is exposed, with a pair of leads from the primary winding exposed
Driver PCB
The drive is very simple. The incoming AC flows through a series resistor through a half-wave rectifier to charge up a 2.2µF film capacitor. Once the voltage on the capacitor reaches a certain level, a DIAC in series with the transformer primary fires, discharging the capacitor through the primary.
The current spike induces a very high voltage on the secondary winding, this then arcs across a gap in the gas flow to start ignition.
We’re now on the final leg of the jobs to be done on the boat! Above is the new prop & shaft, supplied to us by Crowther Marine over in Royton. To fit our current stern tube & gland, the shaft is the same diamter at 1-3/8″. Unfortunately no 4-blade props were available, so I had to go for a 17×11 left-hand, but with a much larger blade area than the old one.
Propellers
Here’s the old prop on the right, with the new one on the left, amazing how different 1 inch of diameter actually looks. The opposite hand of the new prop makes no difference in our case, as I can simply switch the hoses to the hydraulic motor on the shaft to make everything reverse direction.
Stripper
Above is the solution to my problem of no weed hatch – a Stripper Rope Cutter from Ambassador Marine. This device has some seriously viciously sharp cutting teeth to help clear any fouling from the prop in operation. Only time will tell if it’s effective at allowing me to stay out of the canal manually removing the crap!
Cutless Bearing
We finally got the bearing mount finished, by S Brown Engineering in Stockport. This is made from Stainless steel to stop the bearing corroding in place & becoming a real arse to replace. Set screws are fitted to make sure the bearing doesn’t move in service.
Attached to the side of the bearing housing is the fixed blade mounting for the Stripper Rope Cutter.
Bearing Test Fit
Above is everything fitted to the shaft for a test before the gear went into it’s home in the stern tube. The Stripper mounts behind the prop, clamped to the shaft. The 3 moving blades move against the fixed blade like a mechanised pair of scissors.
Bearing Strut Welding
10mm steel plate has been used to make the strut for the bearing tube, welded together. In the case of the joint between the stainless tube & the carbon steel strut, special welding rods were needed, at the price of £2 a rod! Using mild steel rods to weld stainless could result in cracking of the welds. Not a good thing on a prop shaft support bearing.
Sand Blasted Hull
Most of the old tube has been cut away to make room for the new bearings, and the bottom of the hull has been sand-blasted ready for welding.
Running Gear Mounted
The bearing mount is welded to the hull, the Stripper & the prop are fitted to the end of the shaft. There’s 1.5″ of clearance from the blade tips to the hull plating. The rudder has about an inch of clearance to the end of the shaft.
Rudder Fence
To help keep the prop wash down, directing more of the force into moving the vessel rather than creating a nice rooster tail, a pair of plates has been welded onto the rudder. These also provide a handy step should someone fall in ;).
Tip Jar
If you’ve found my content useful, please consider leaving a donation by clicking the Tip Jar below!
All collected funds go towards new content & the costs of keeping the server online.
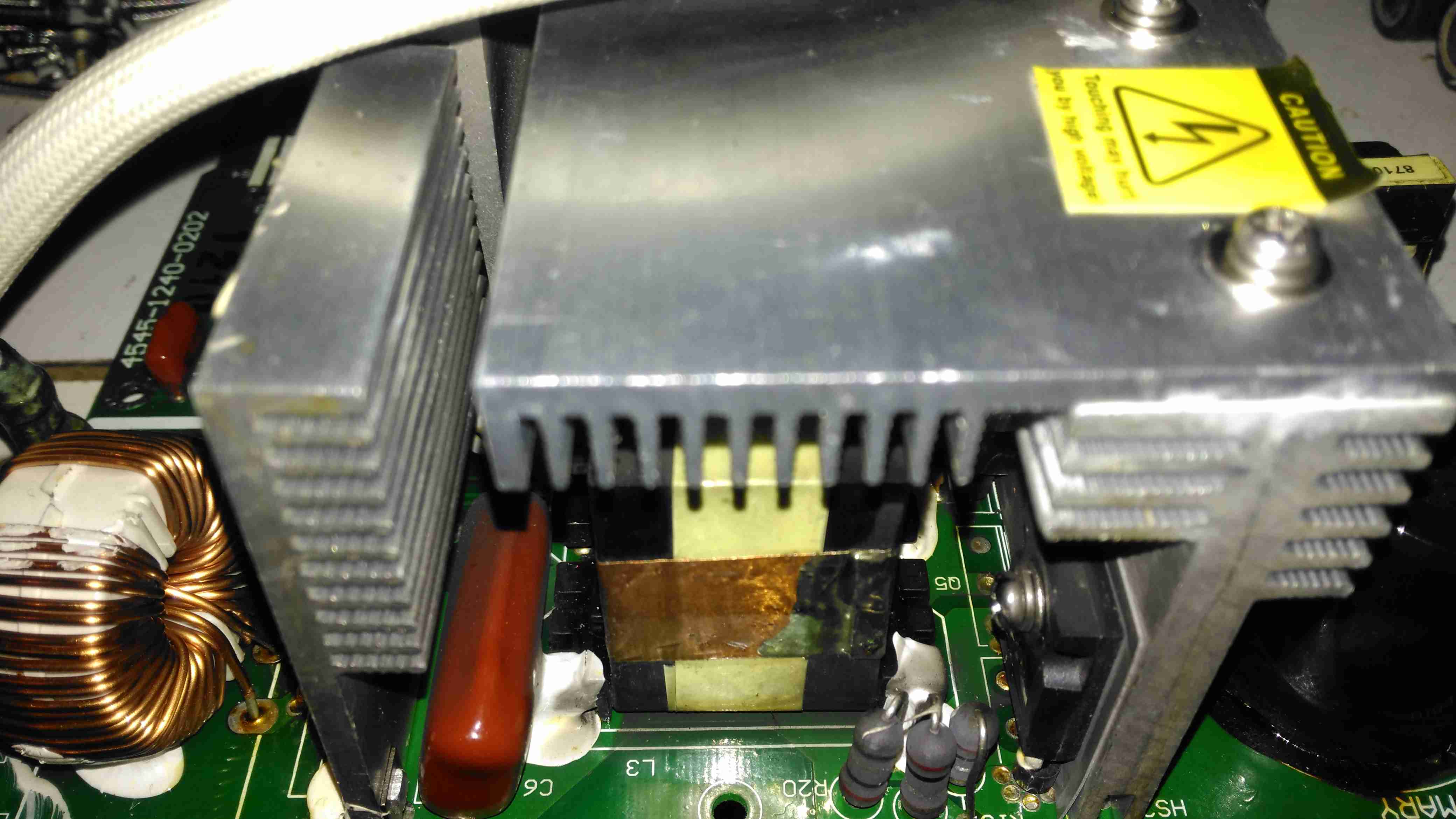
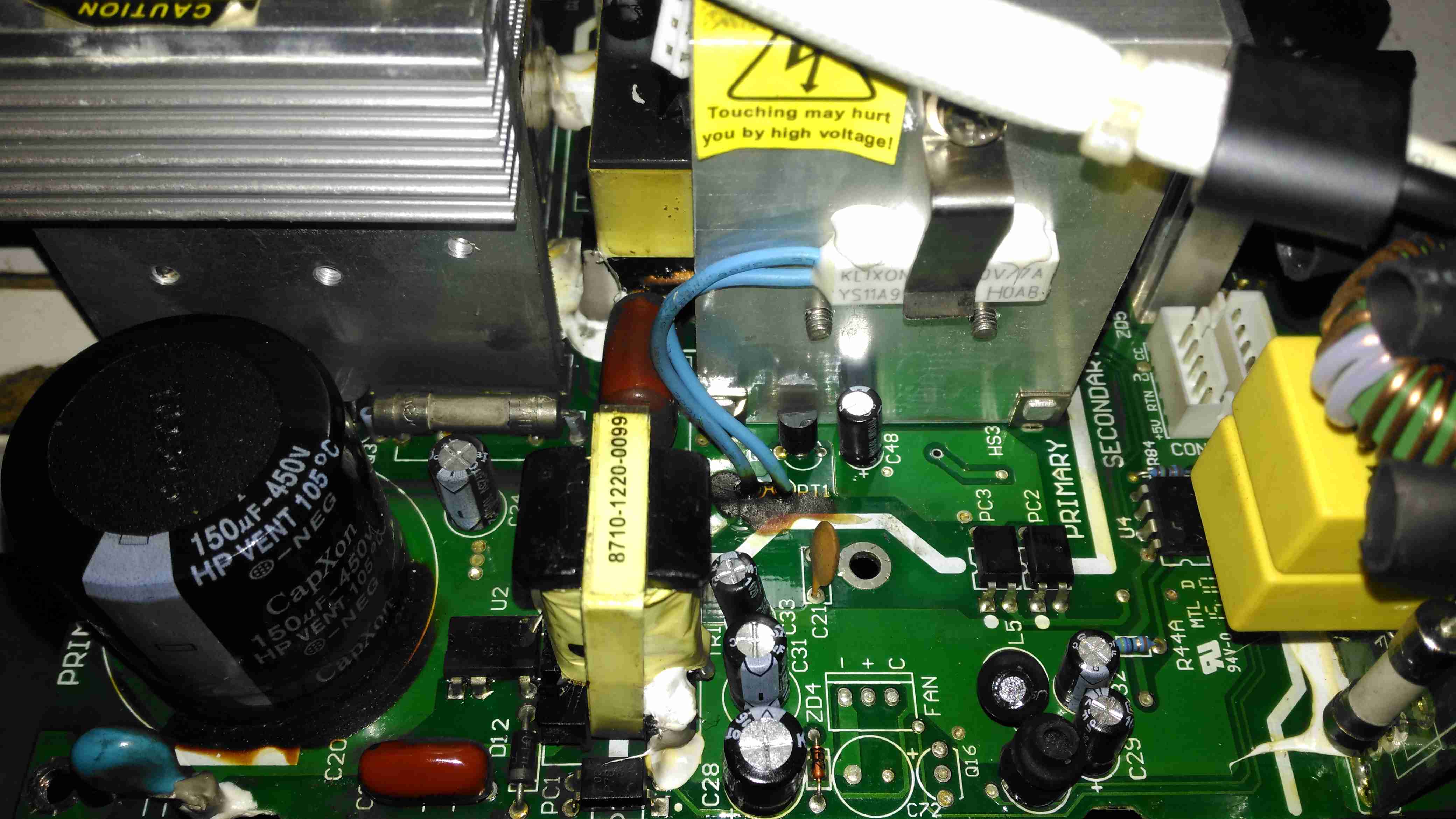

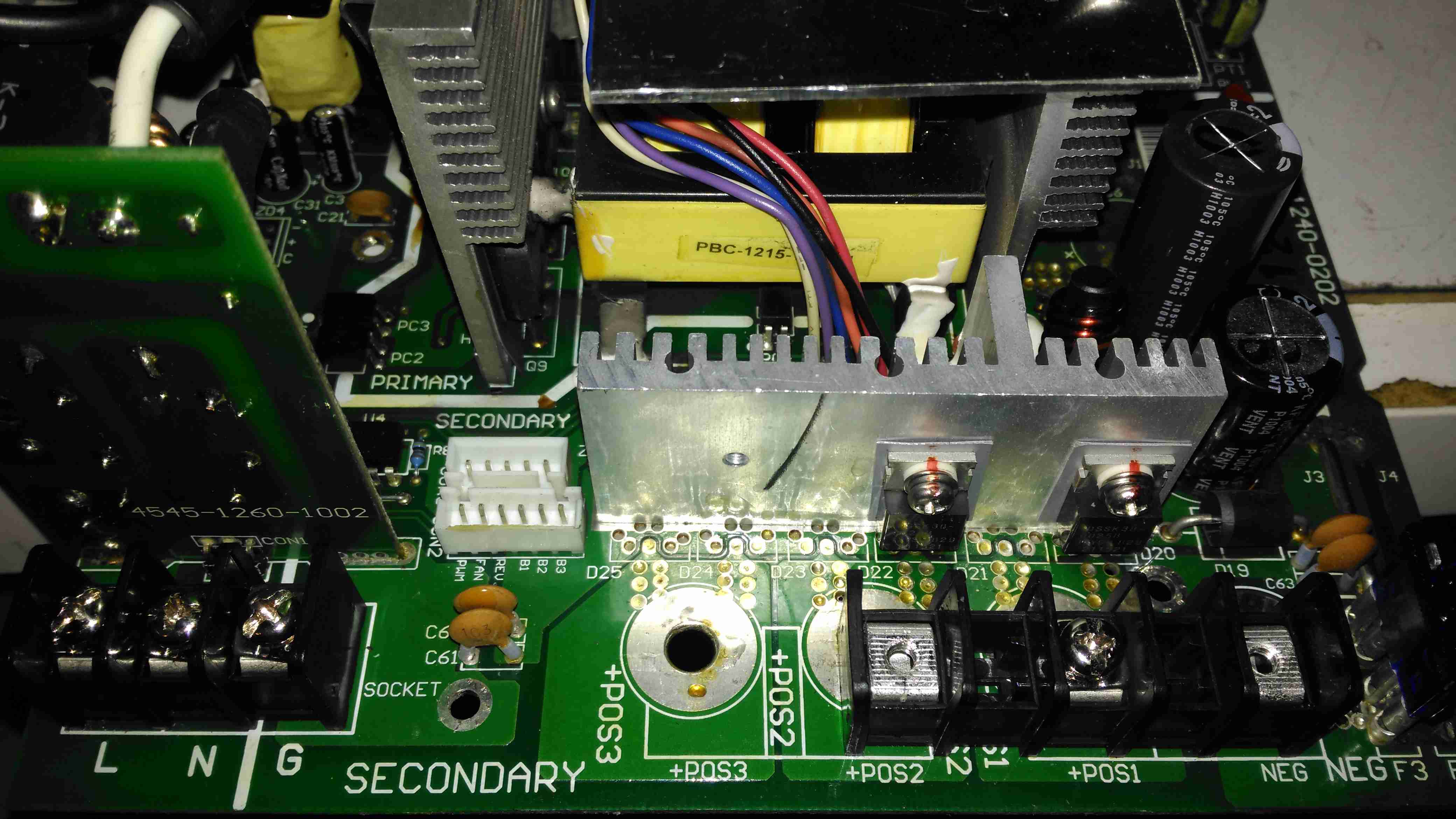
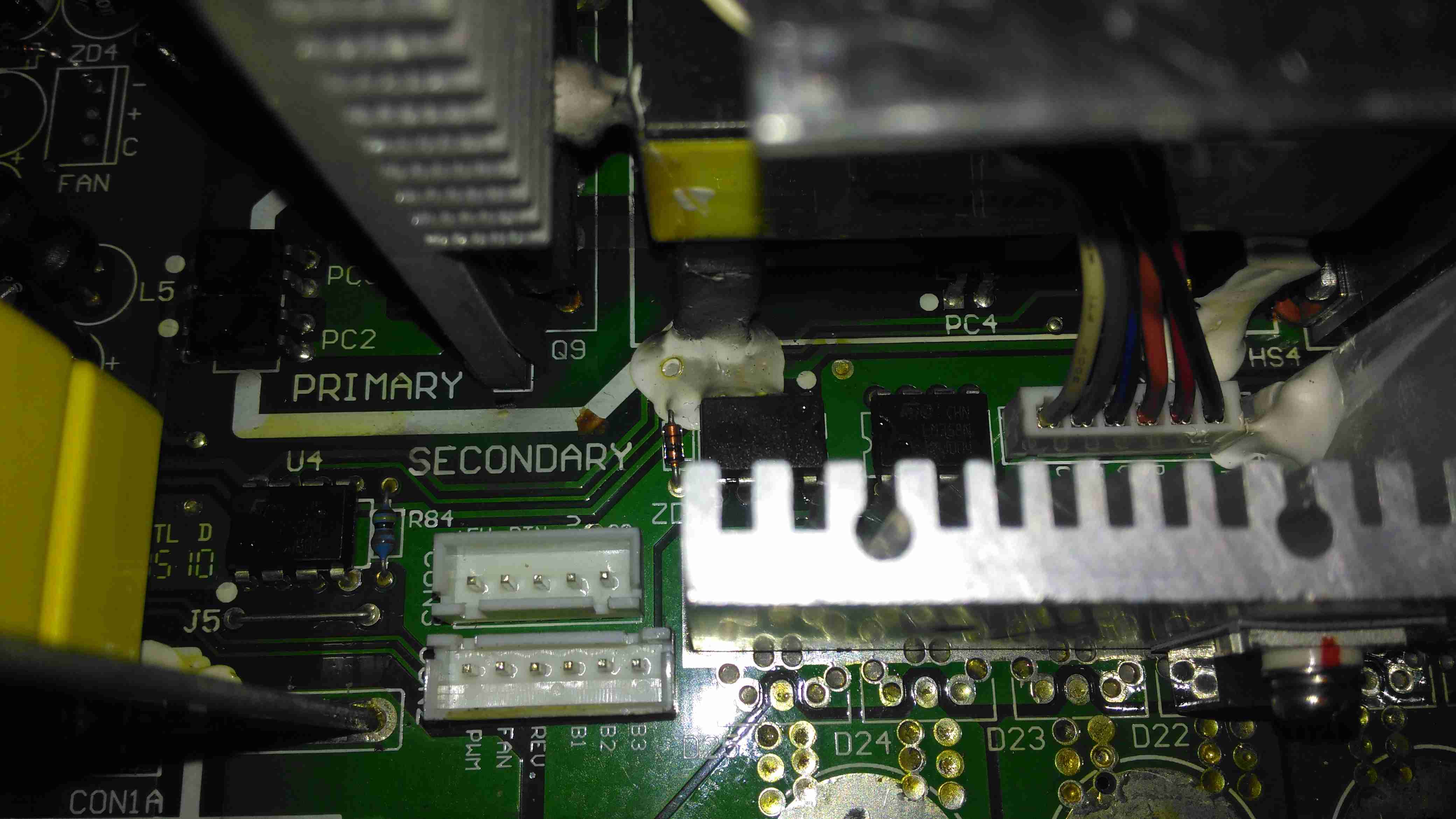
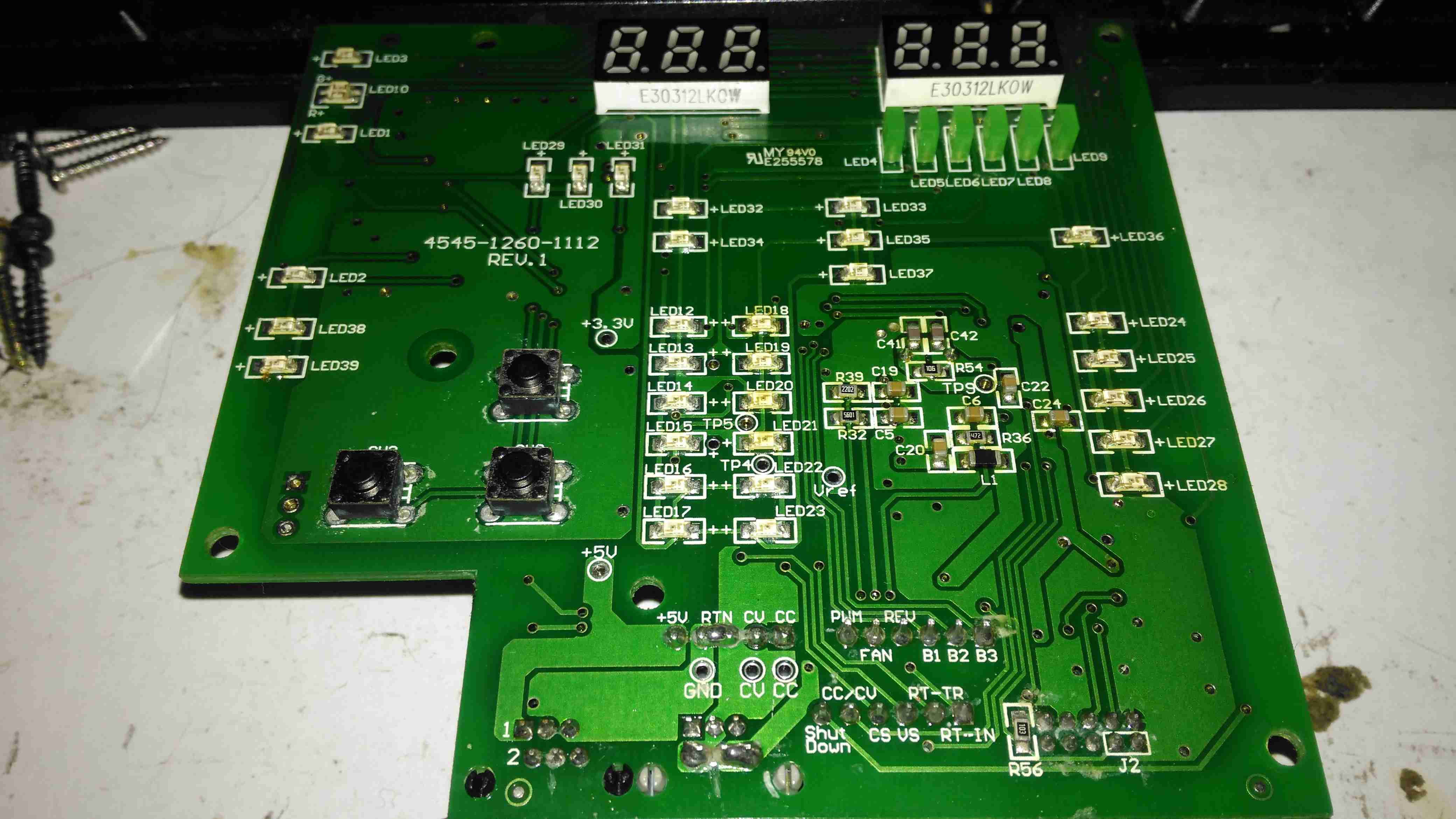
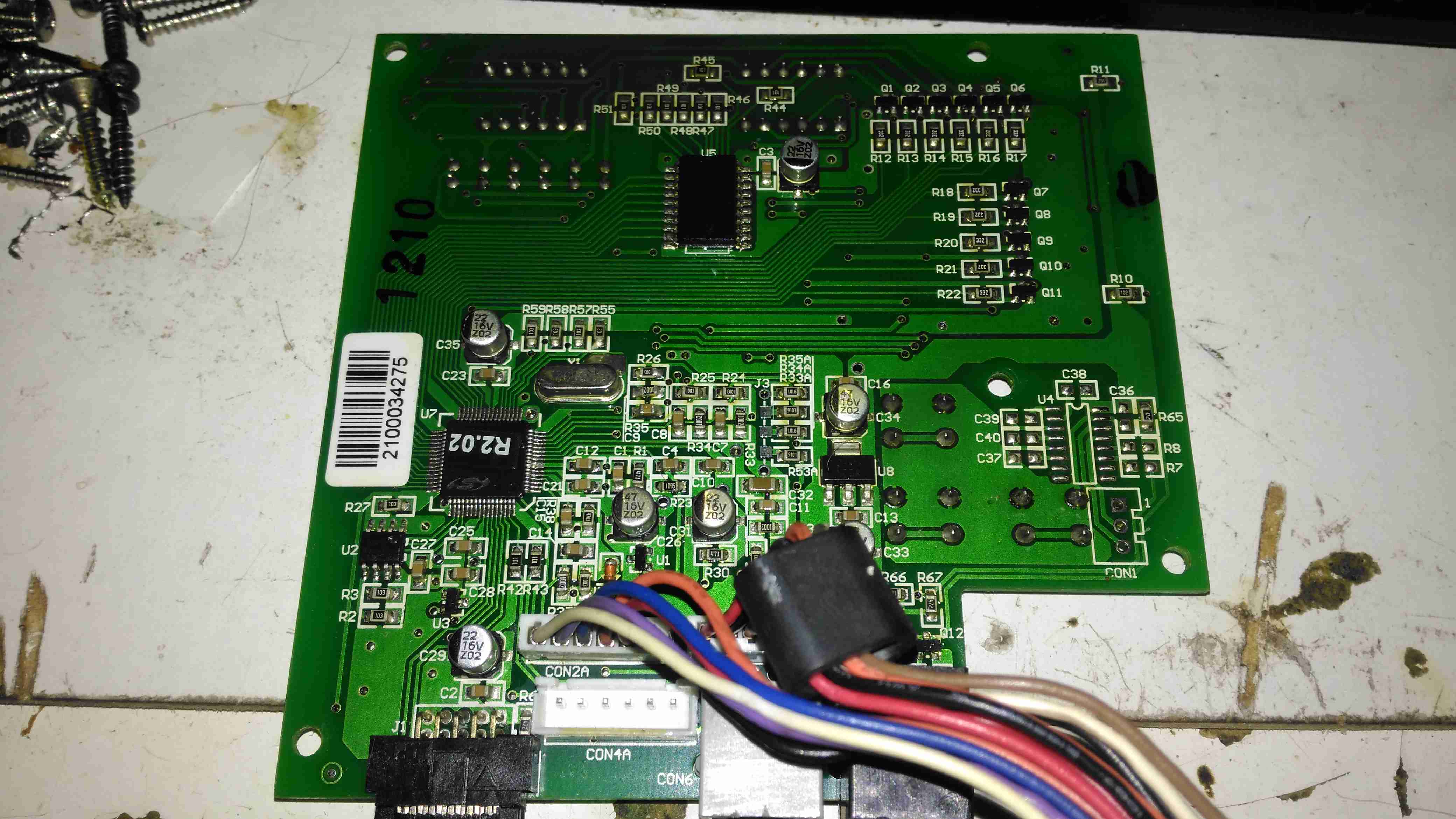
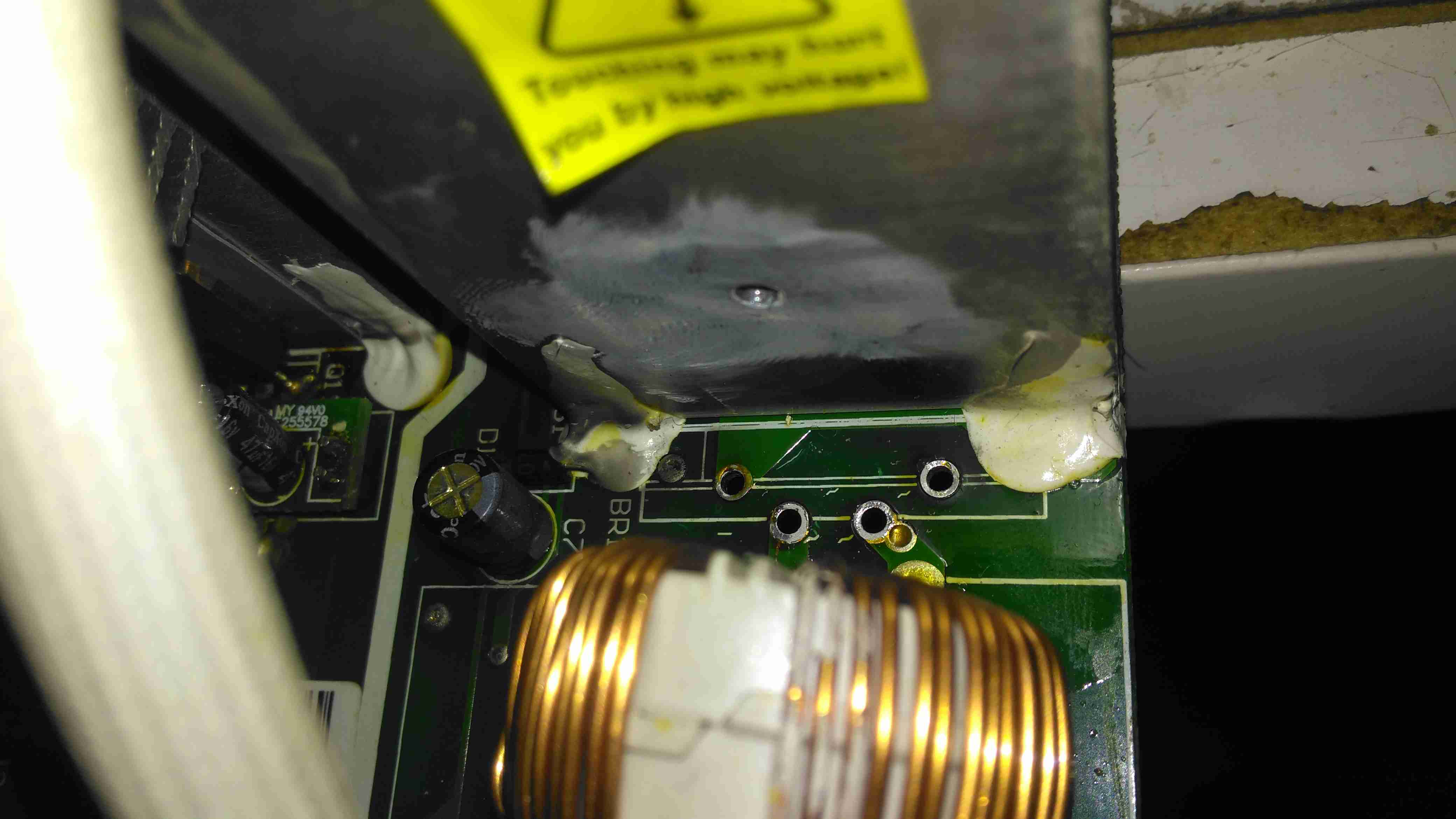
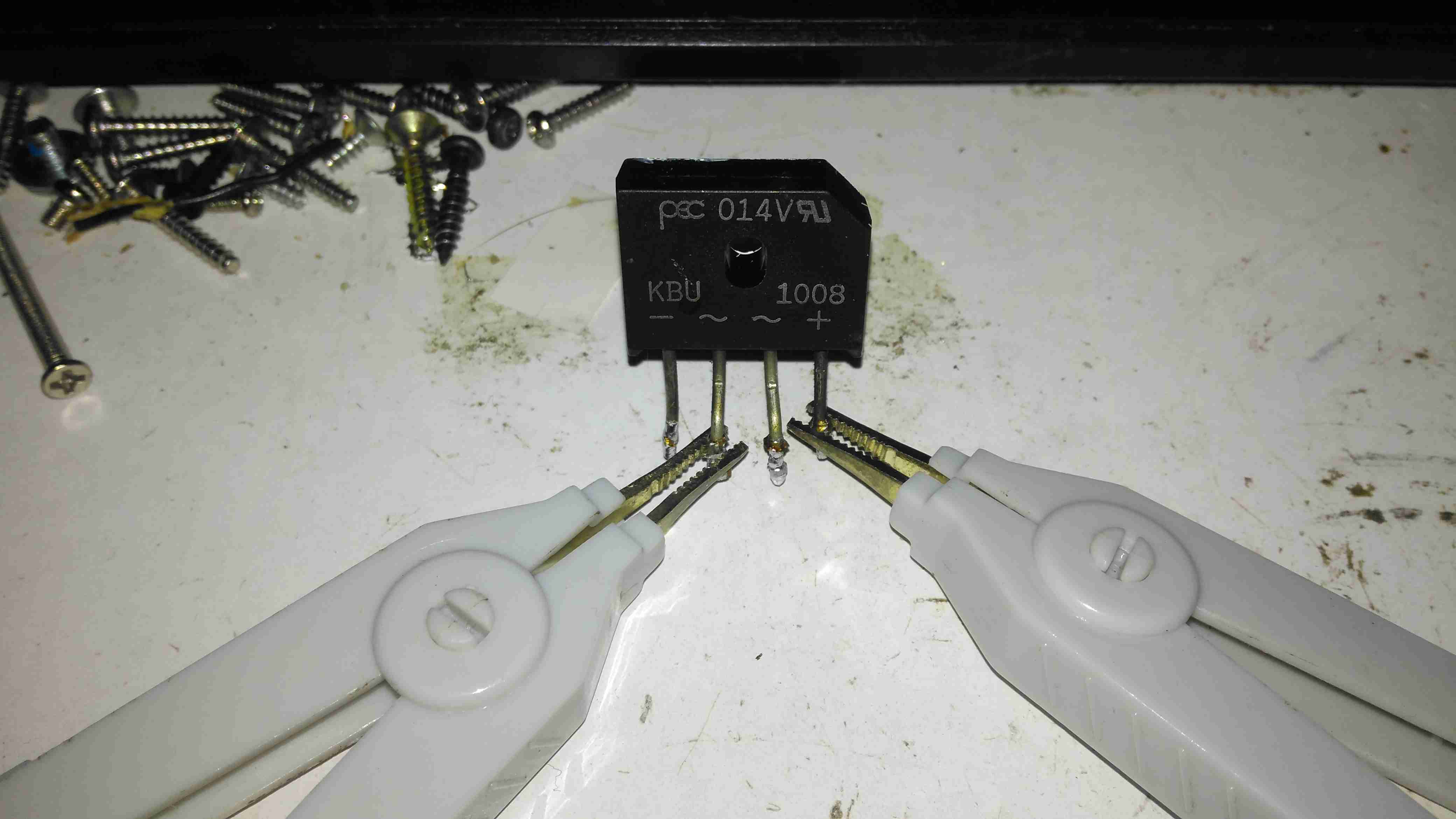

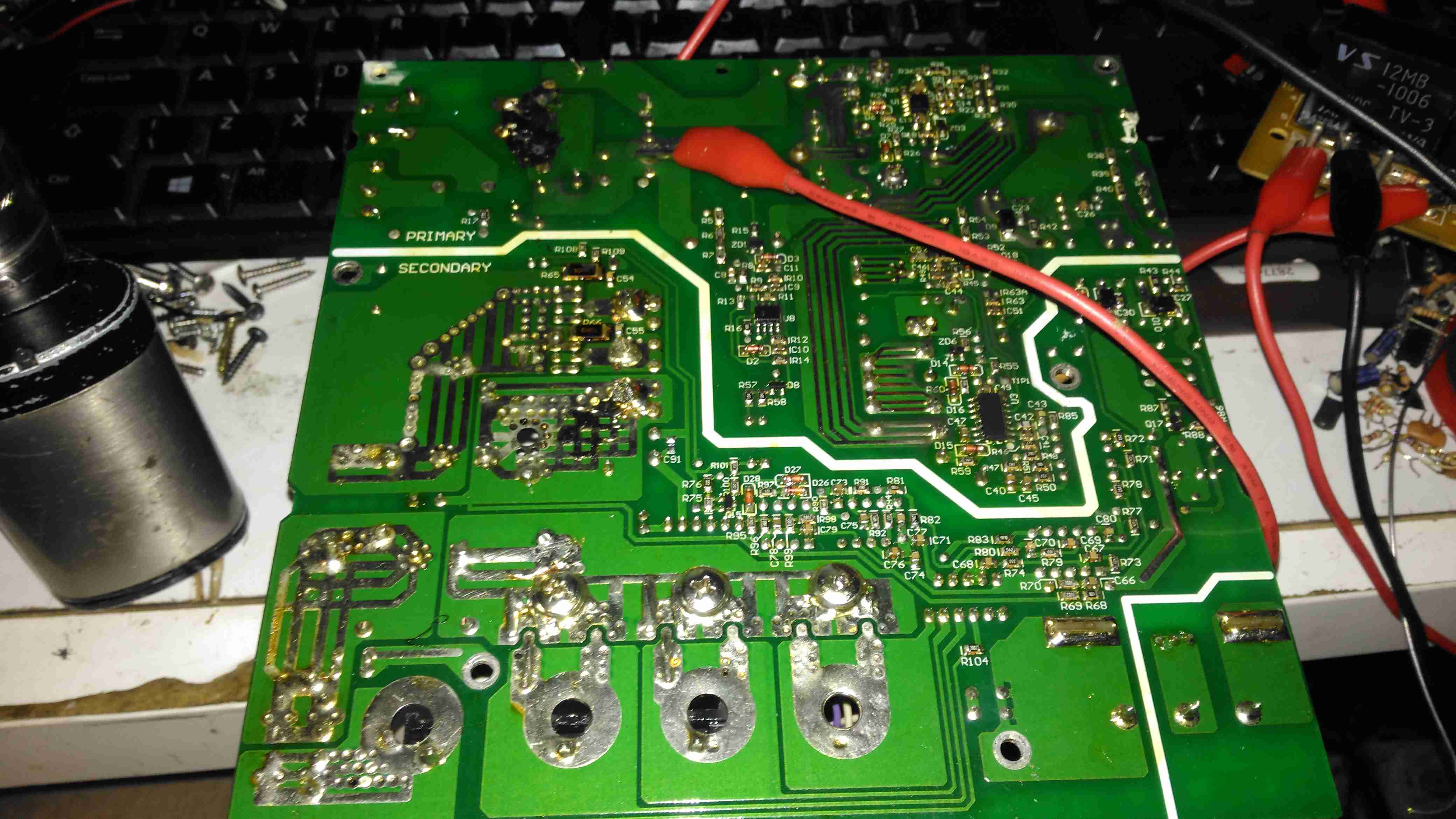
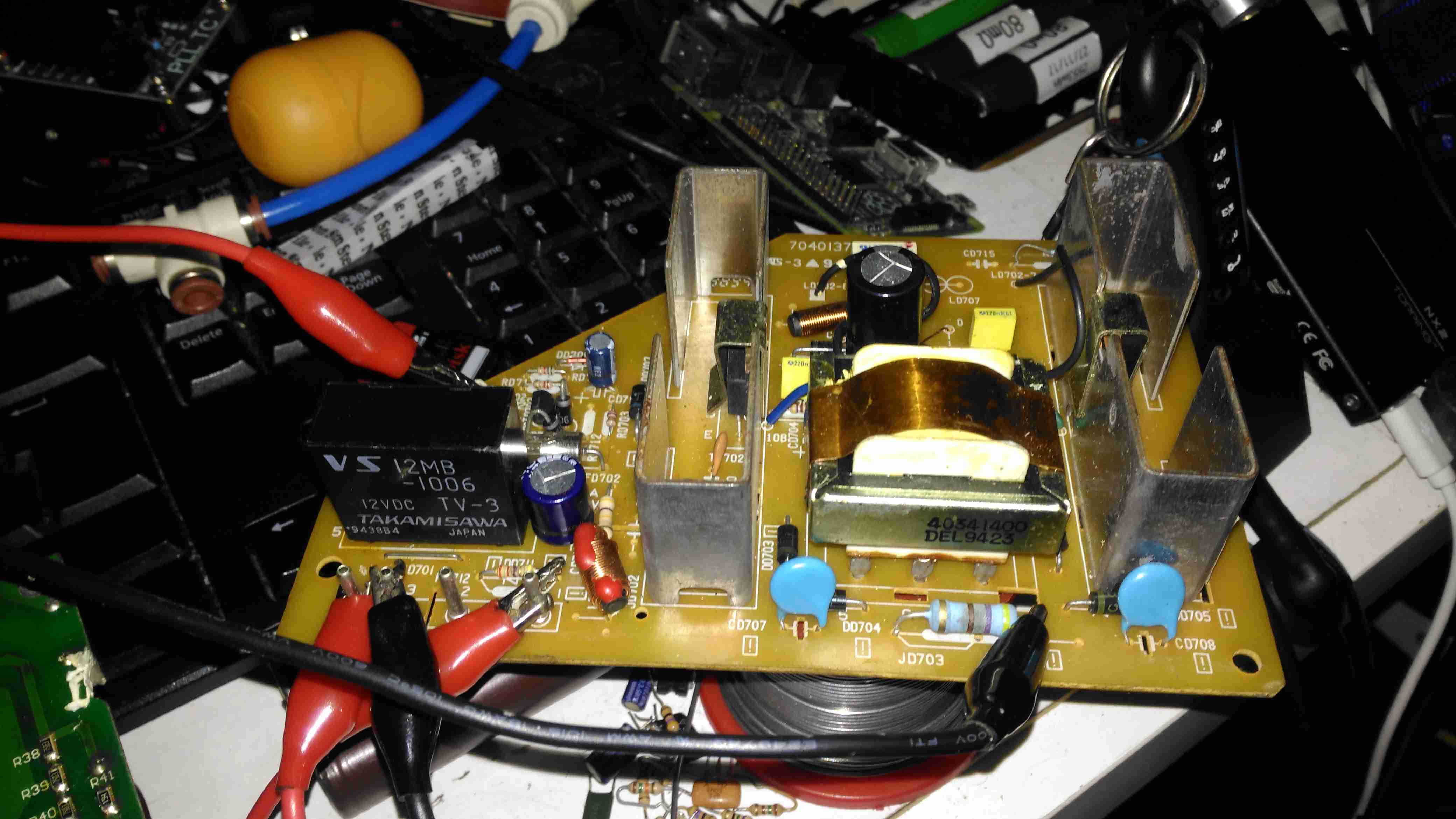
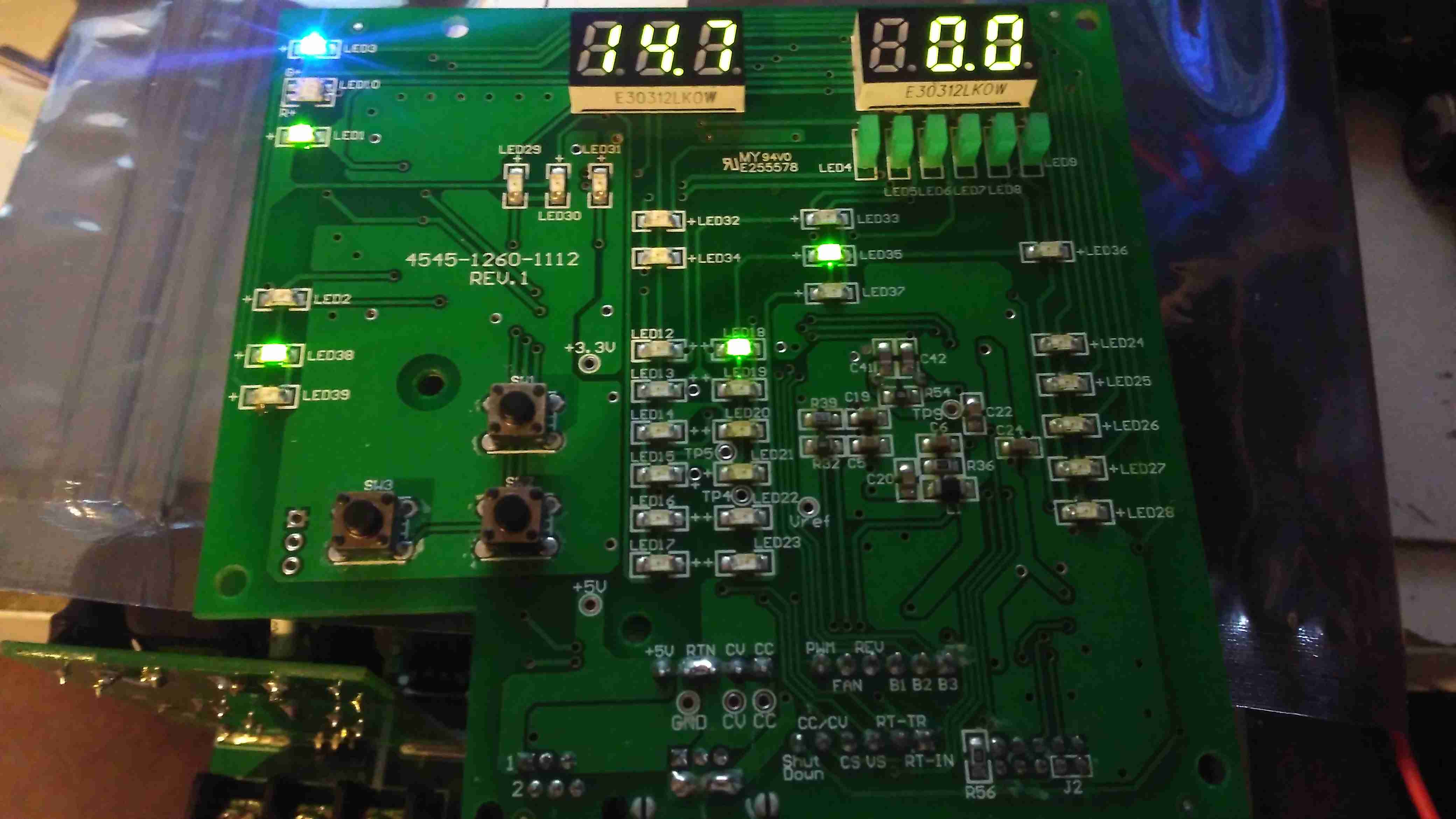
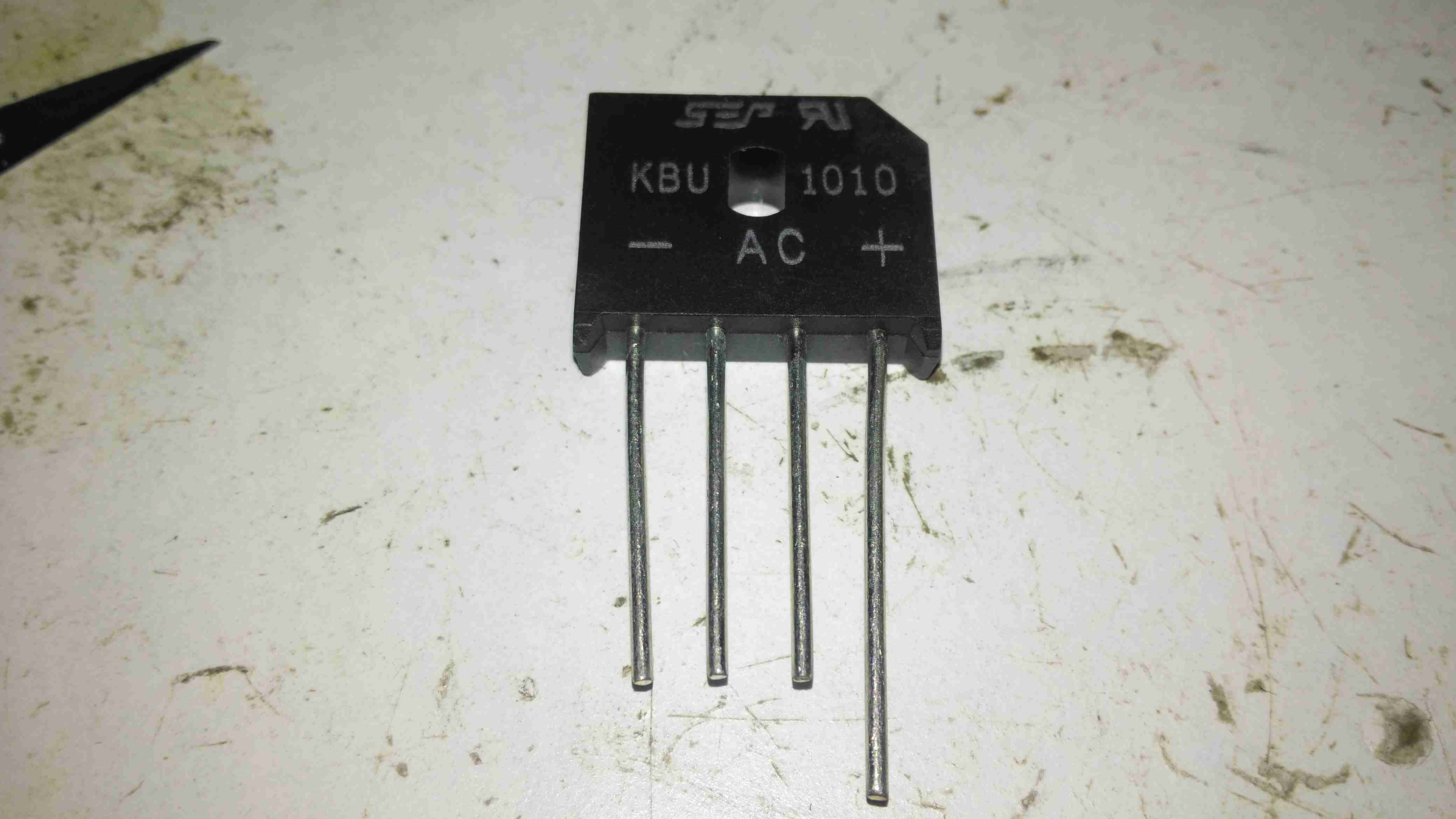
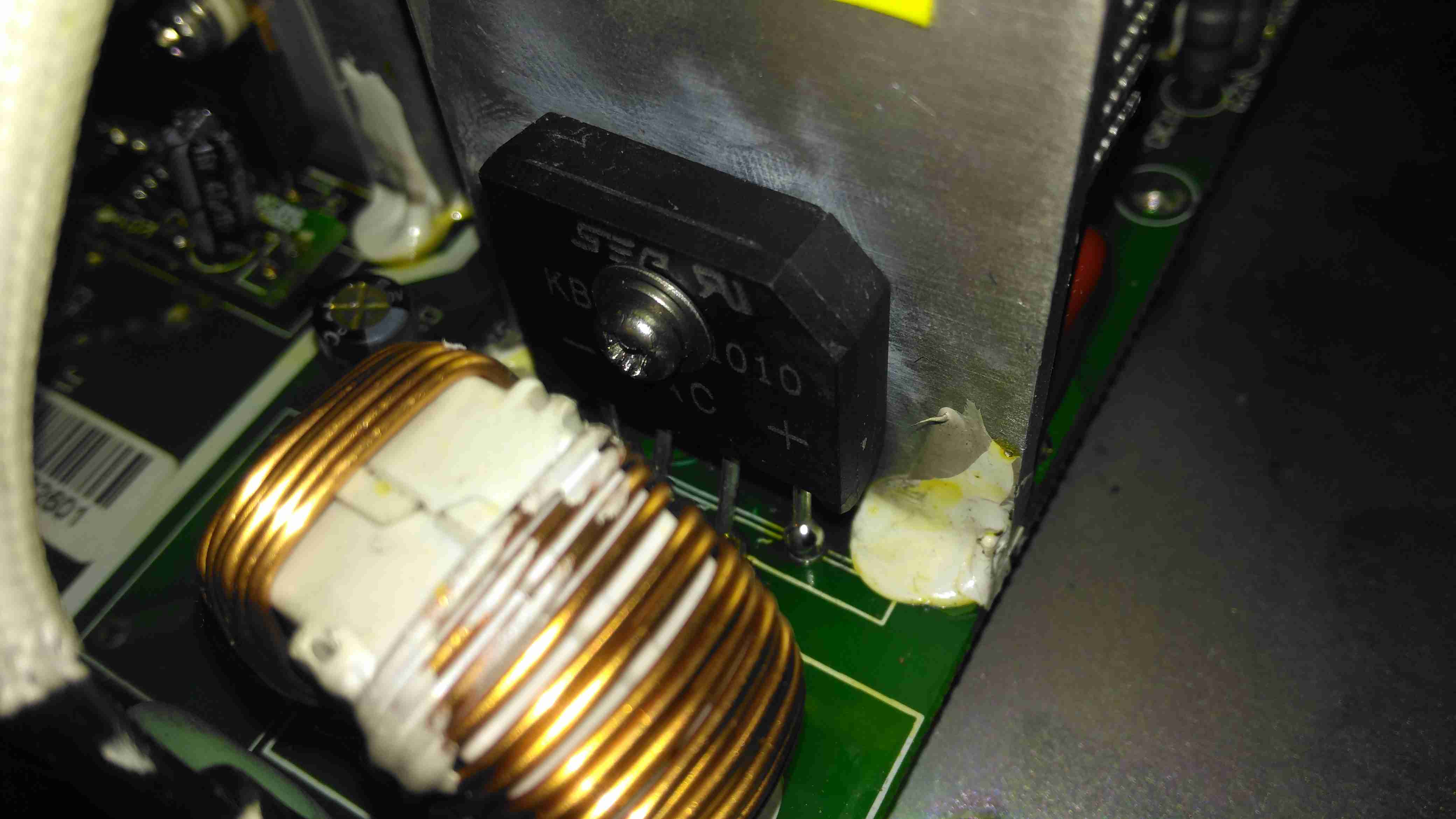
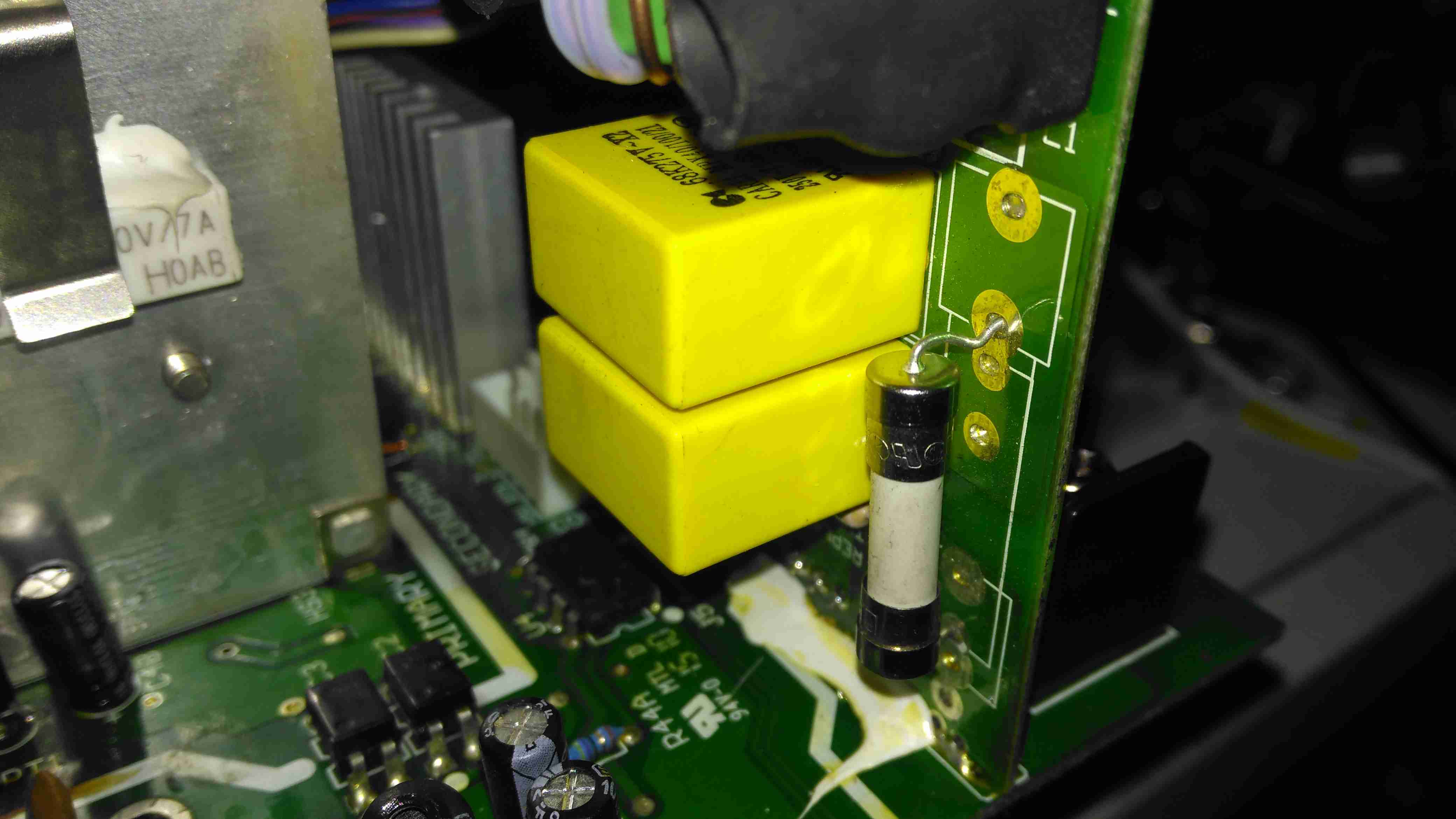
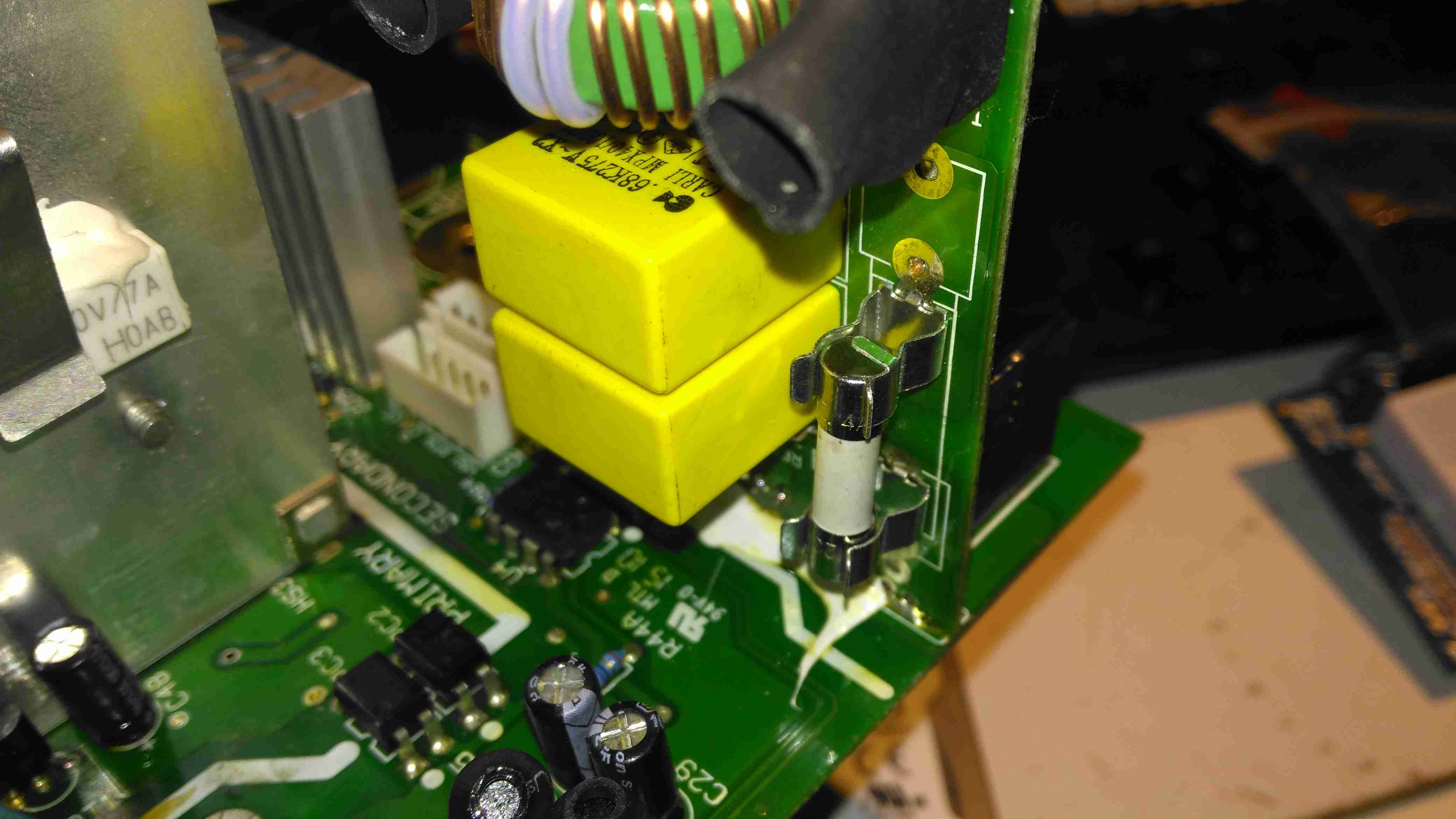

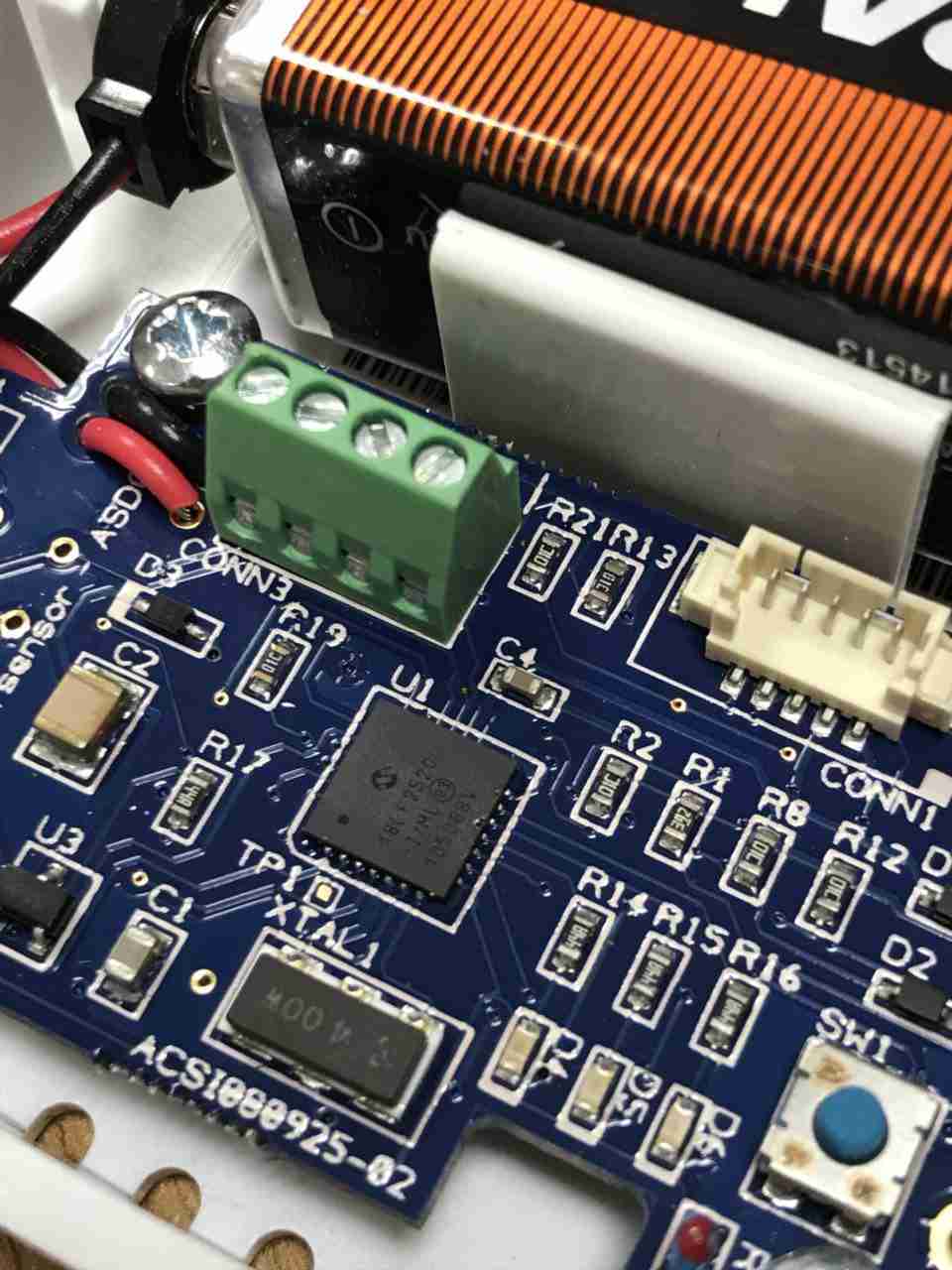


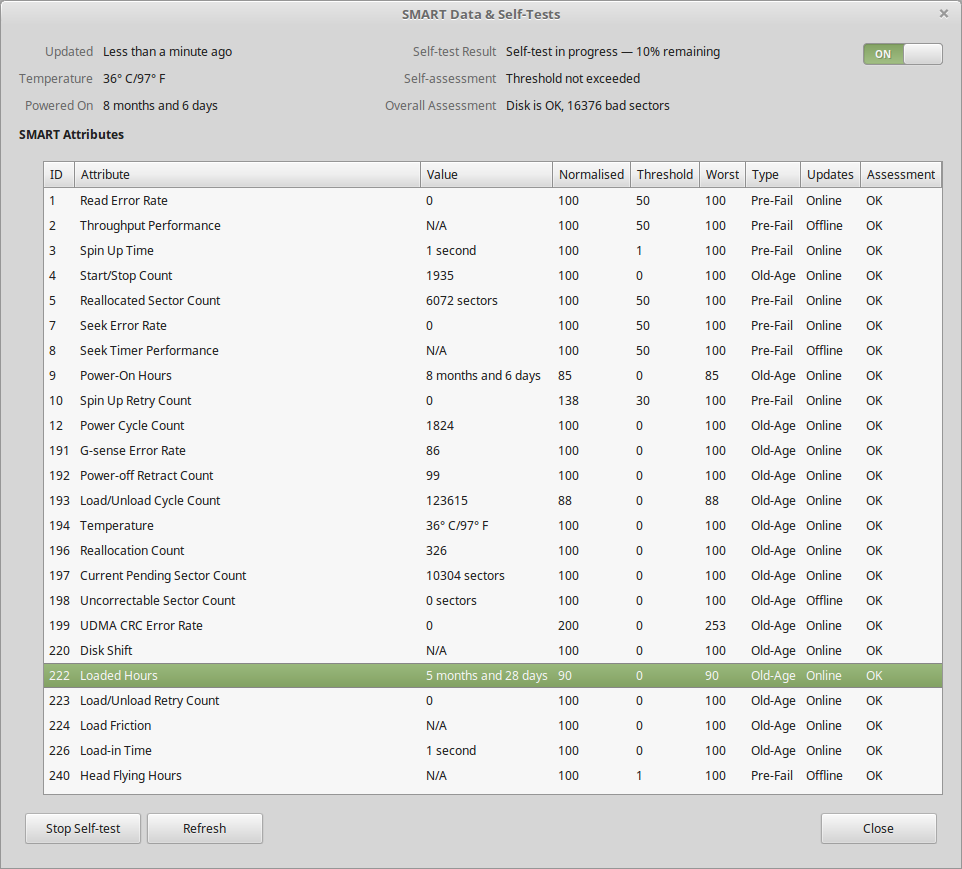


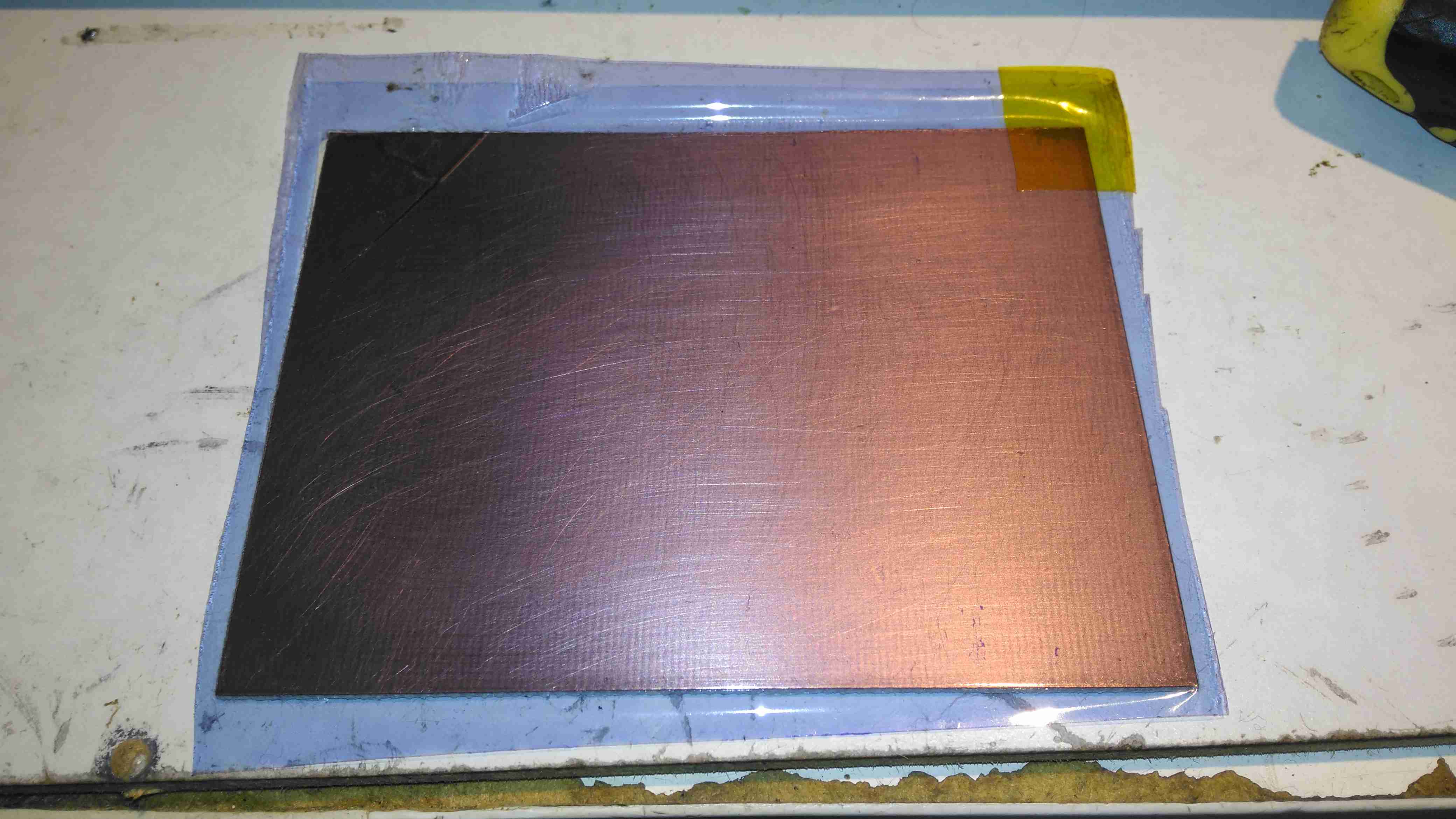
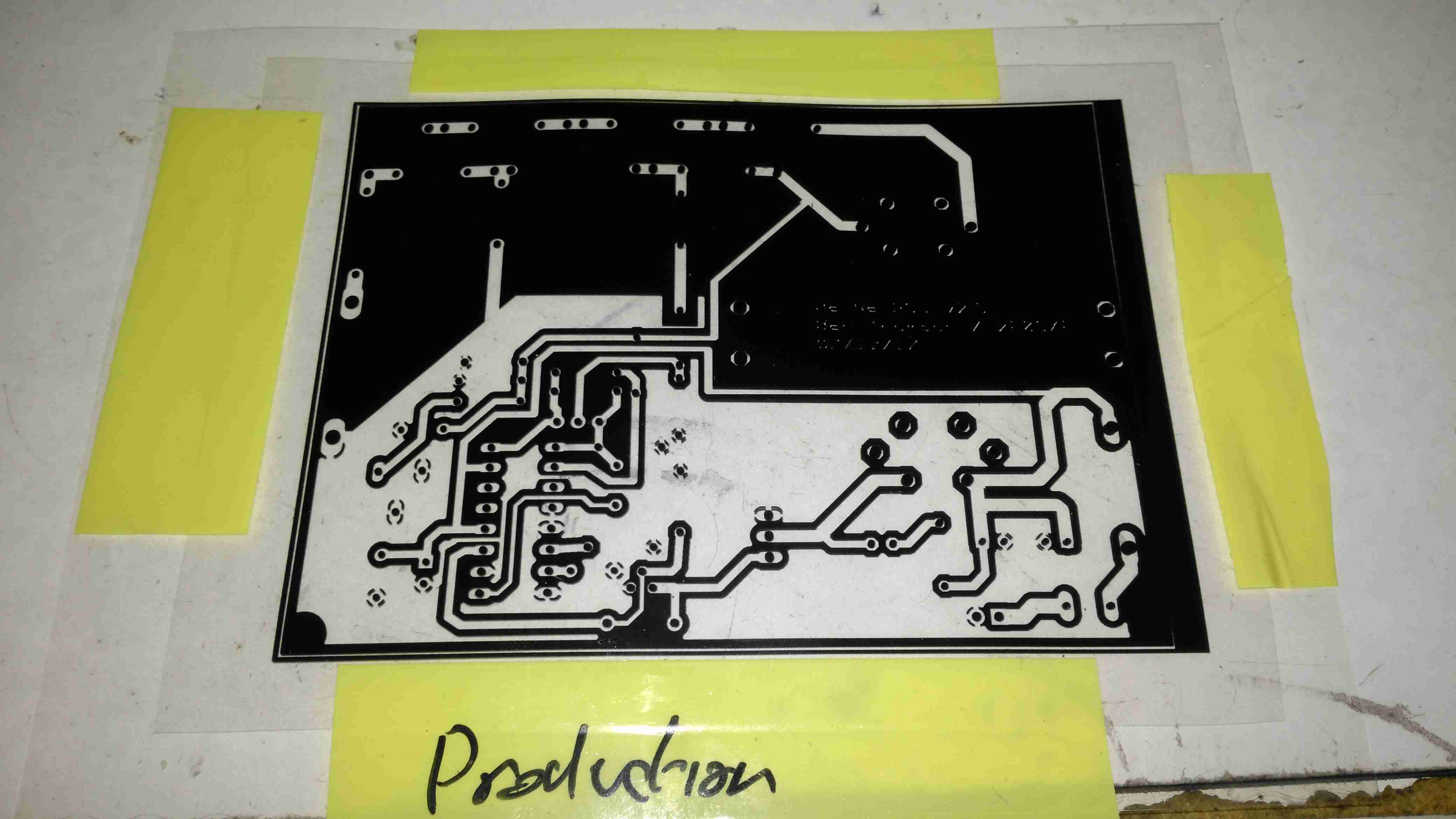

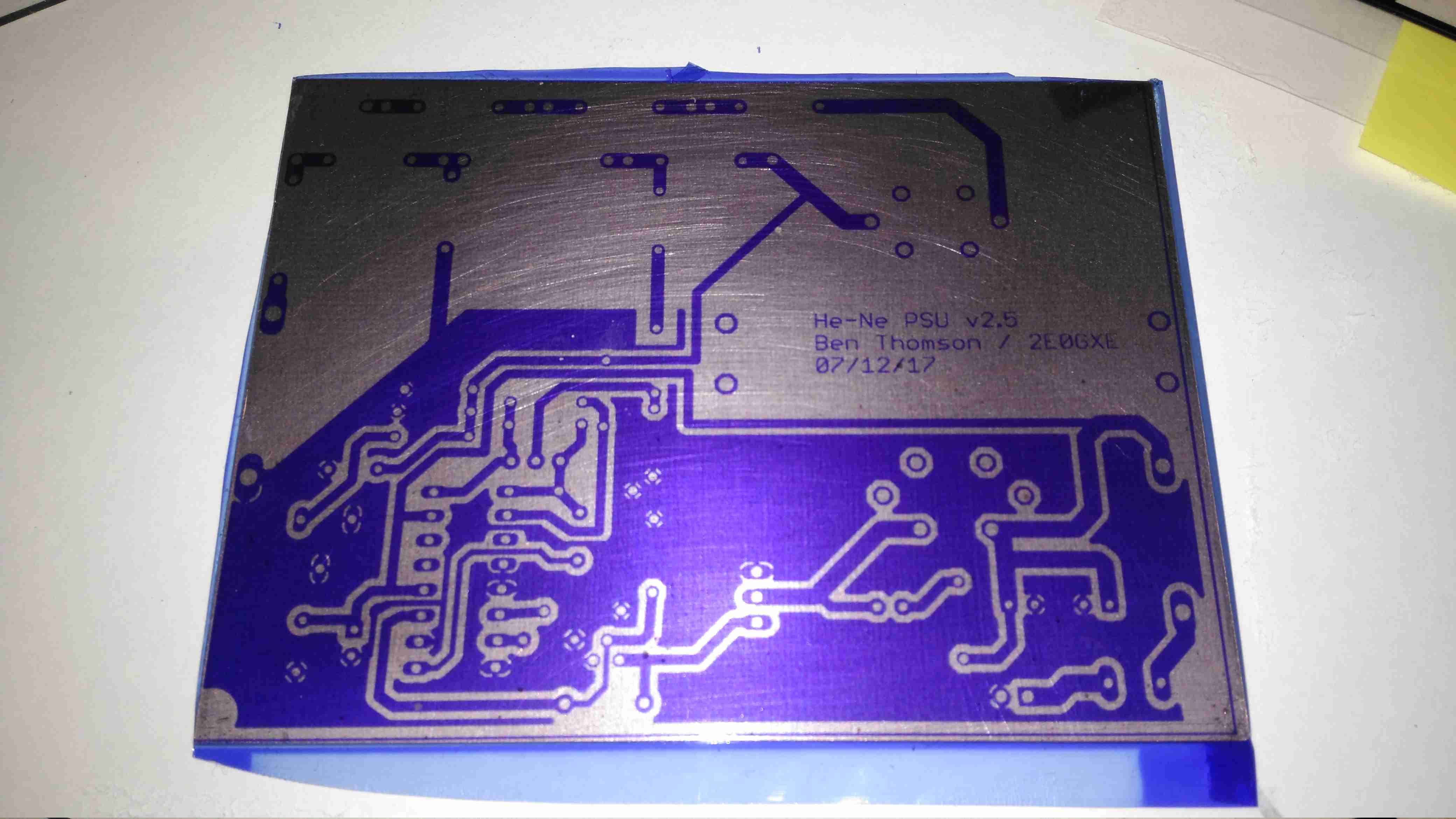
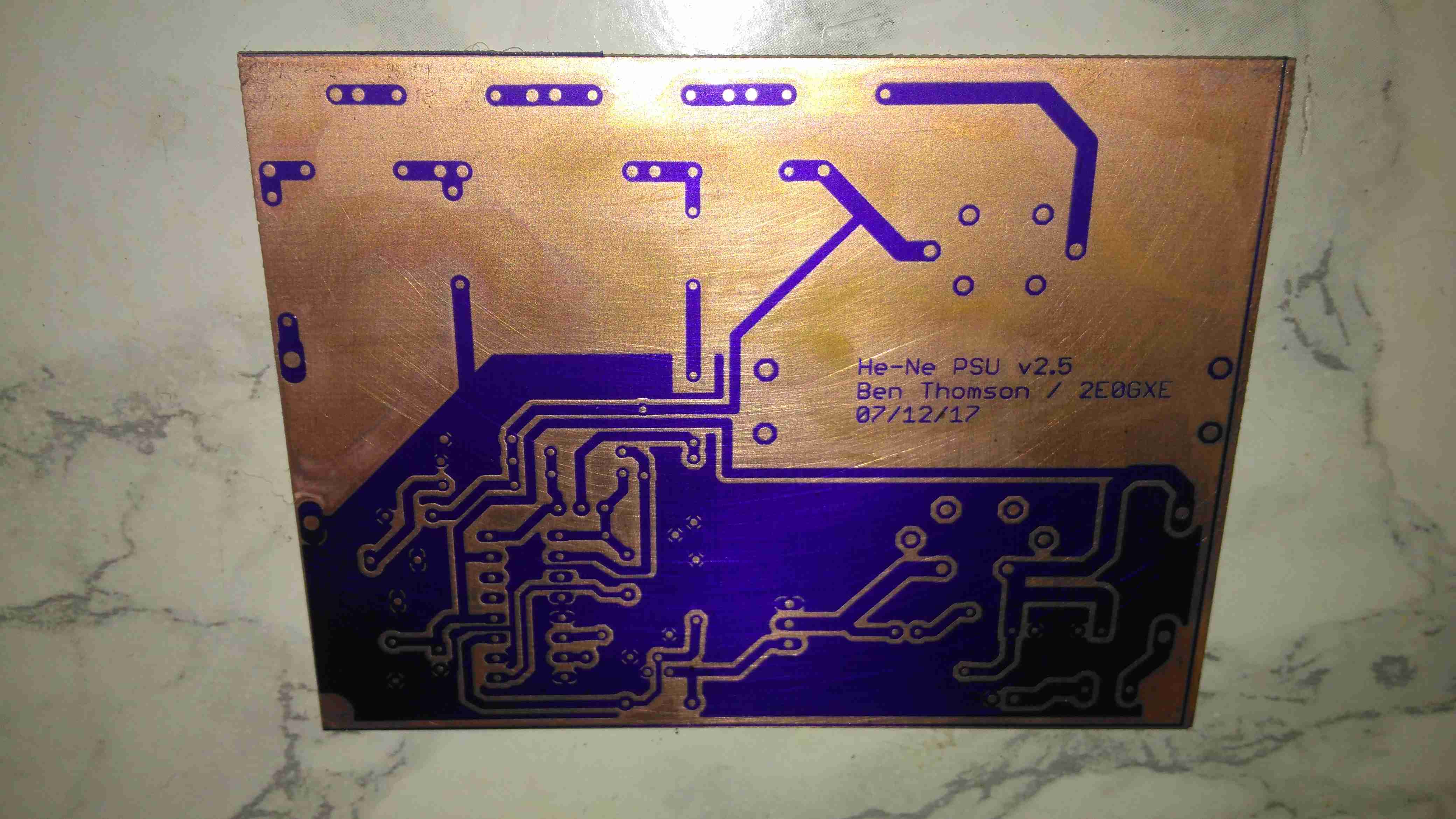
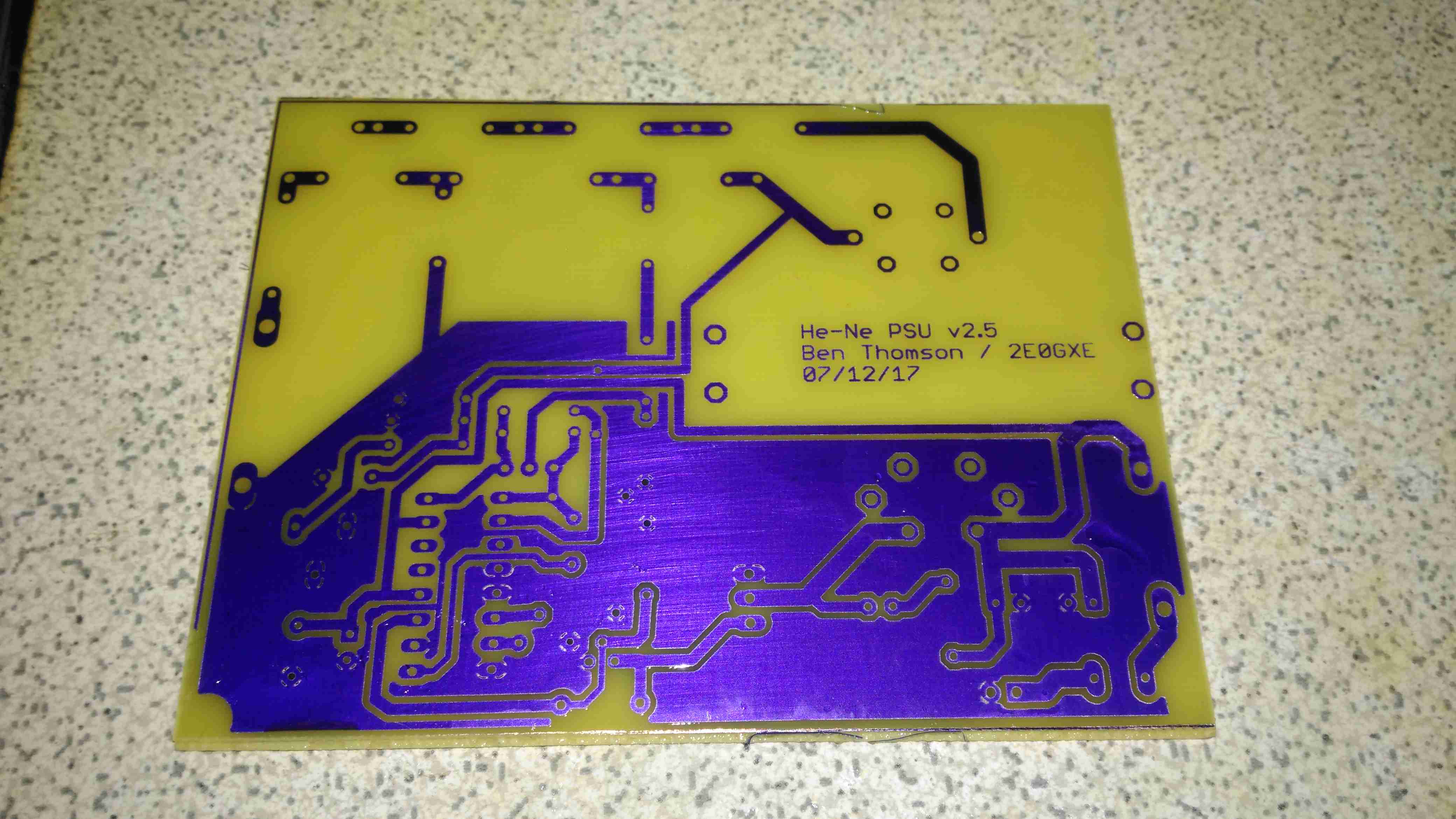
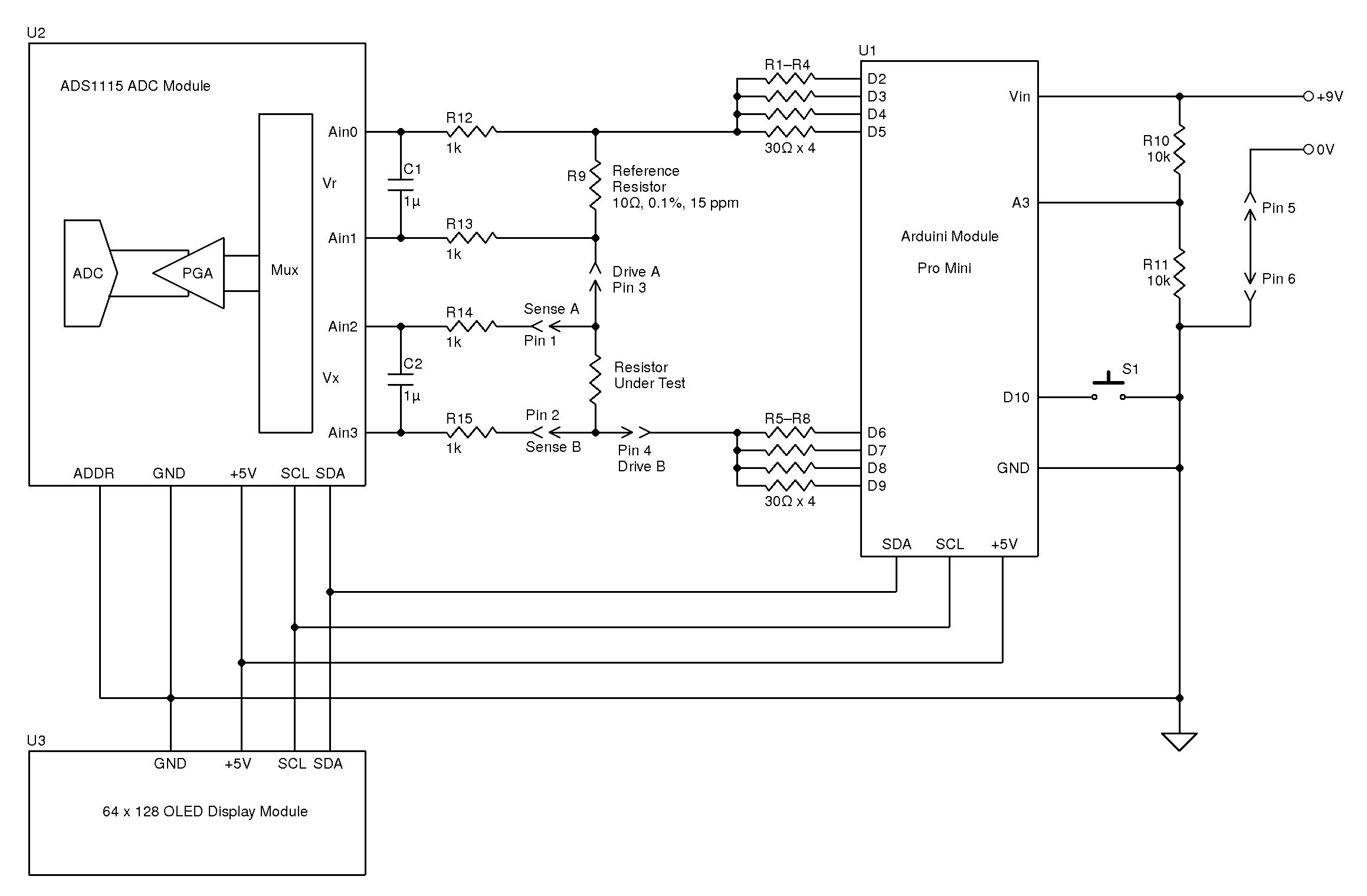
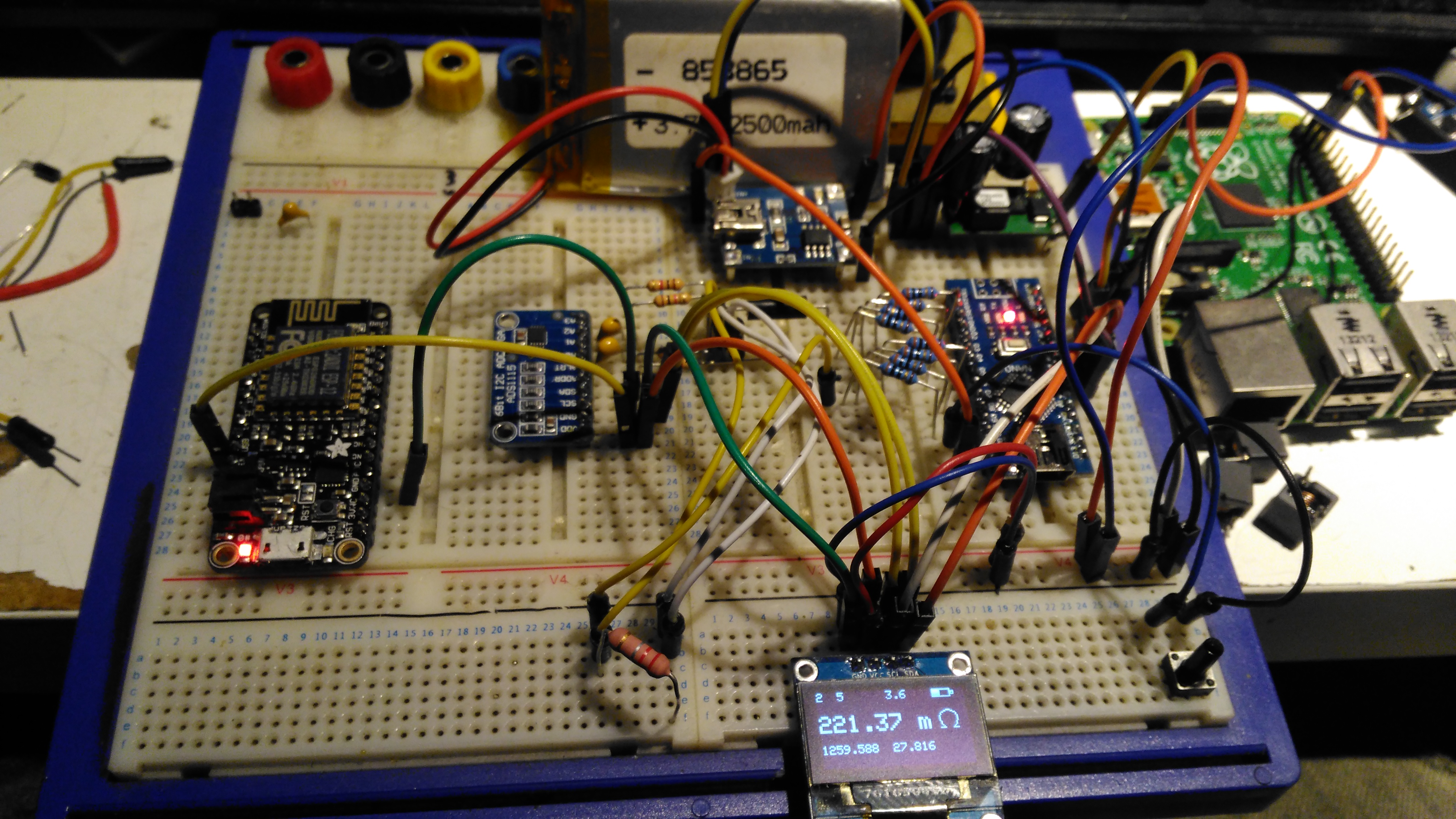
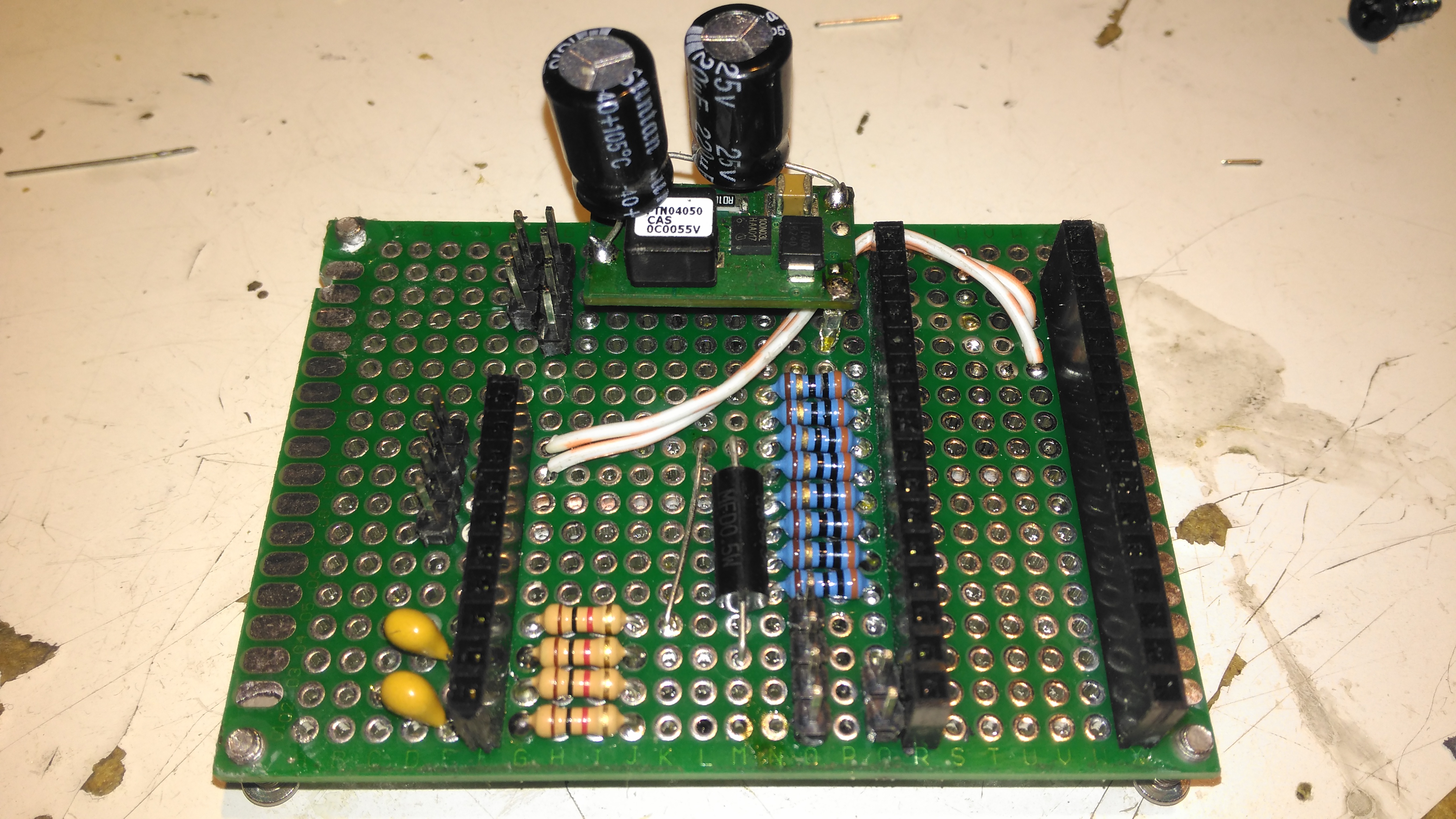
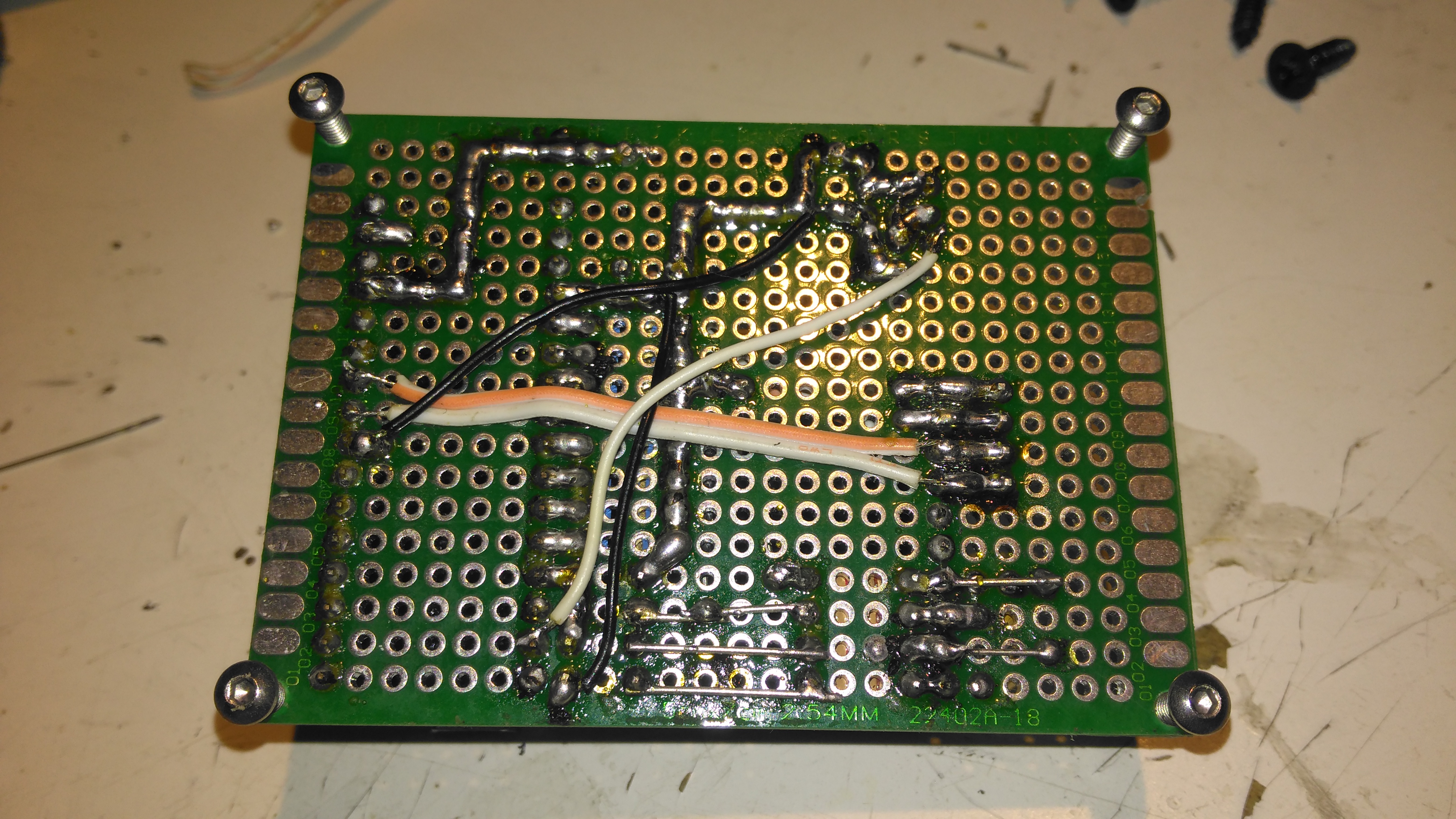
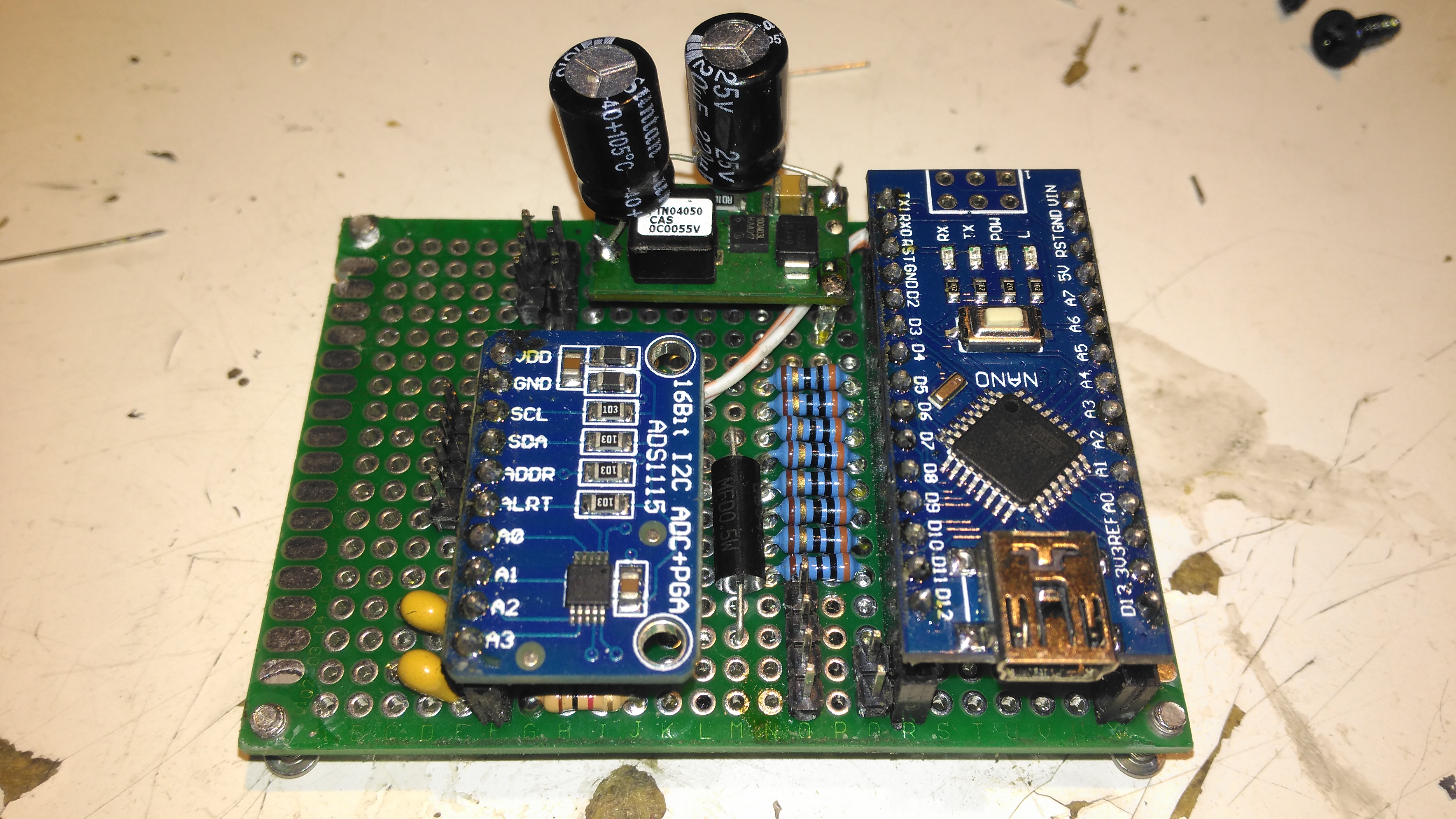


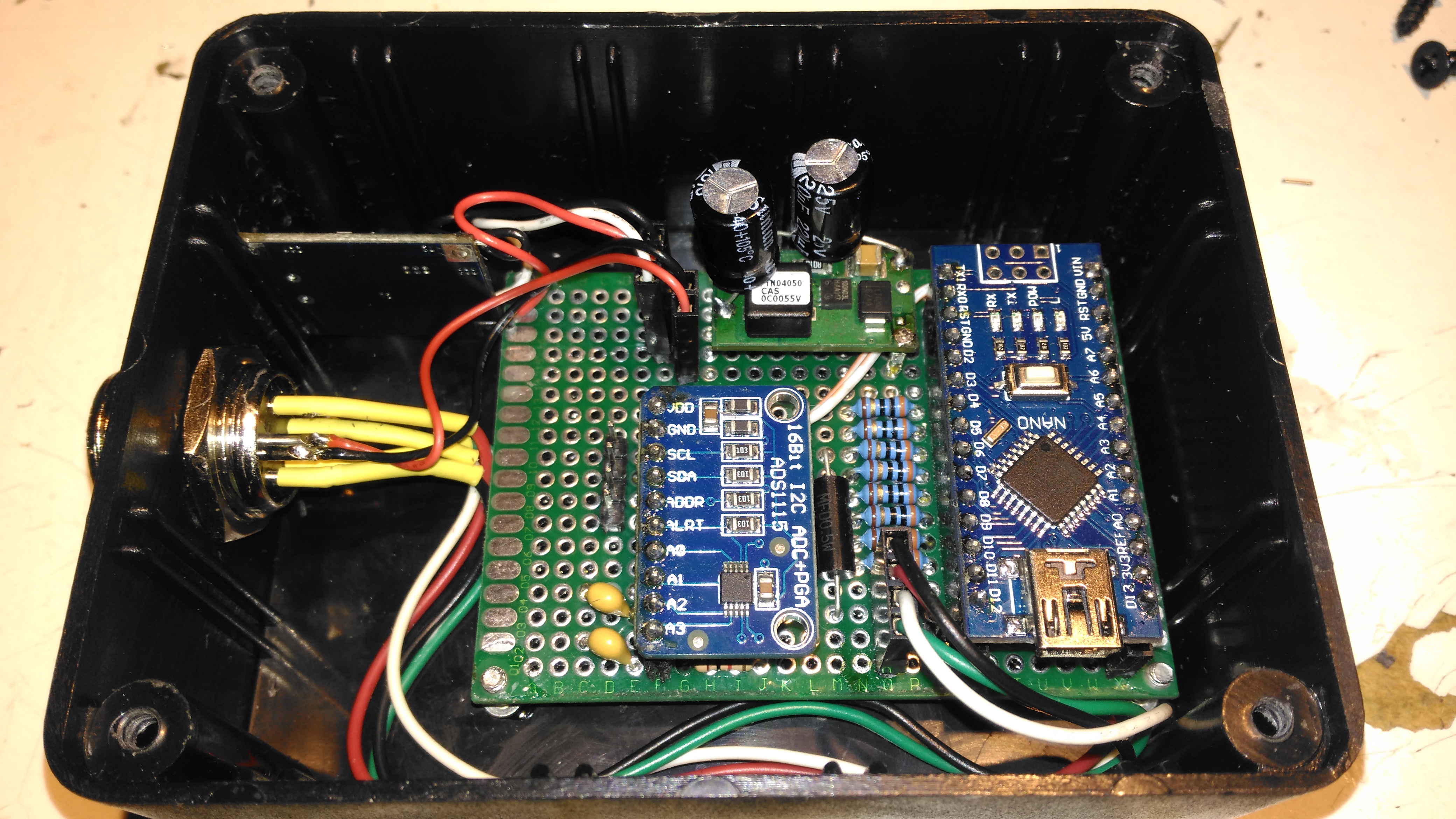



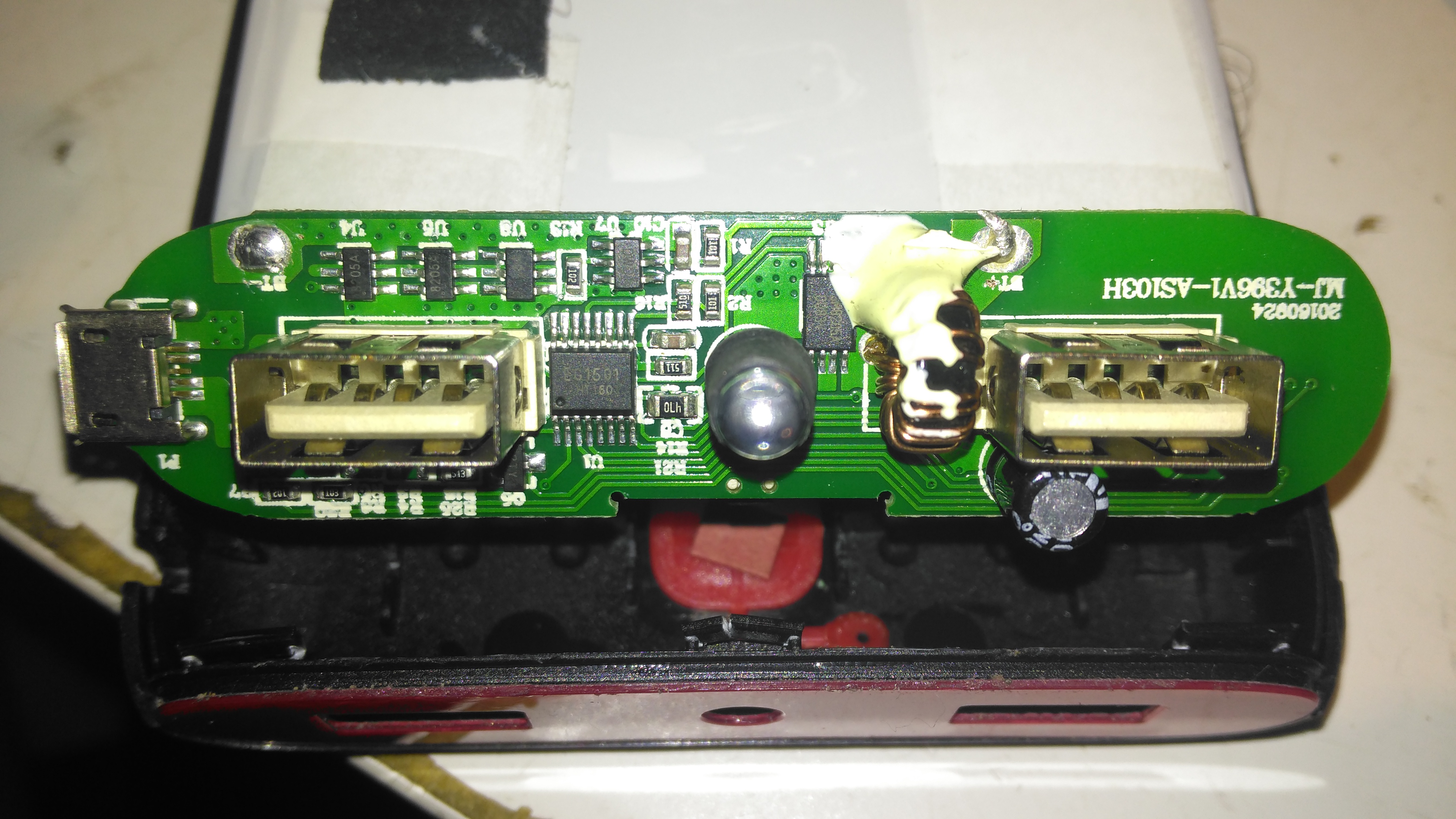
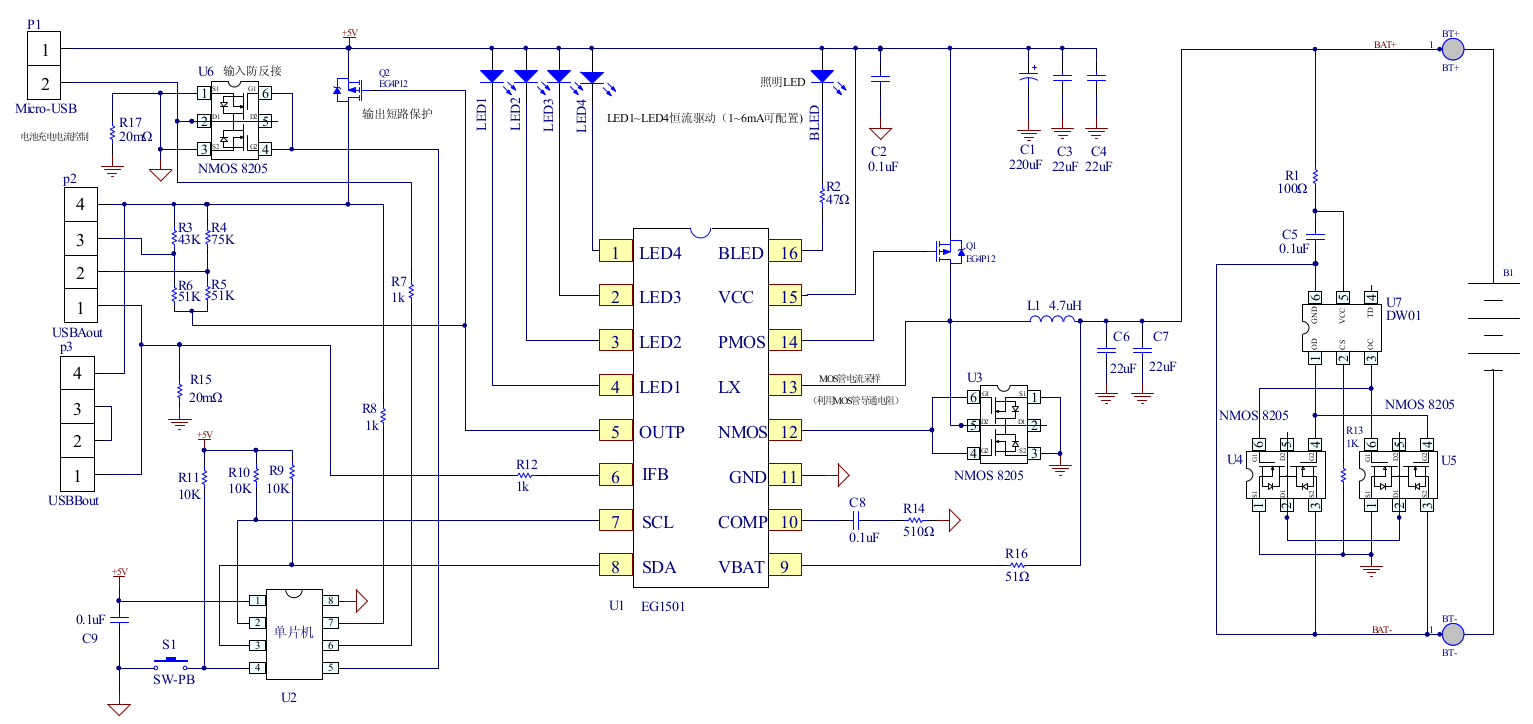
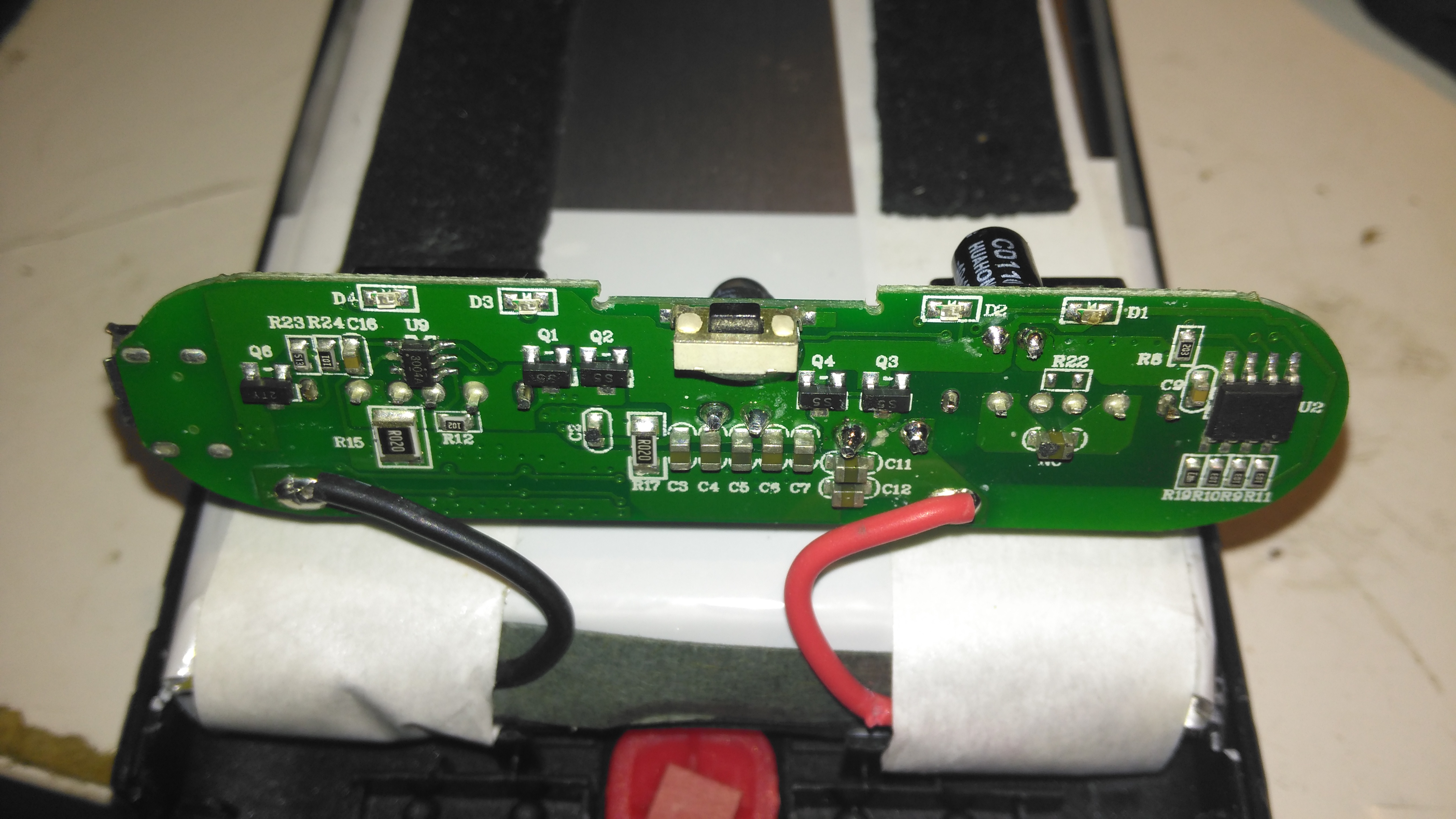
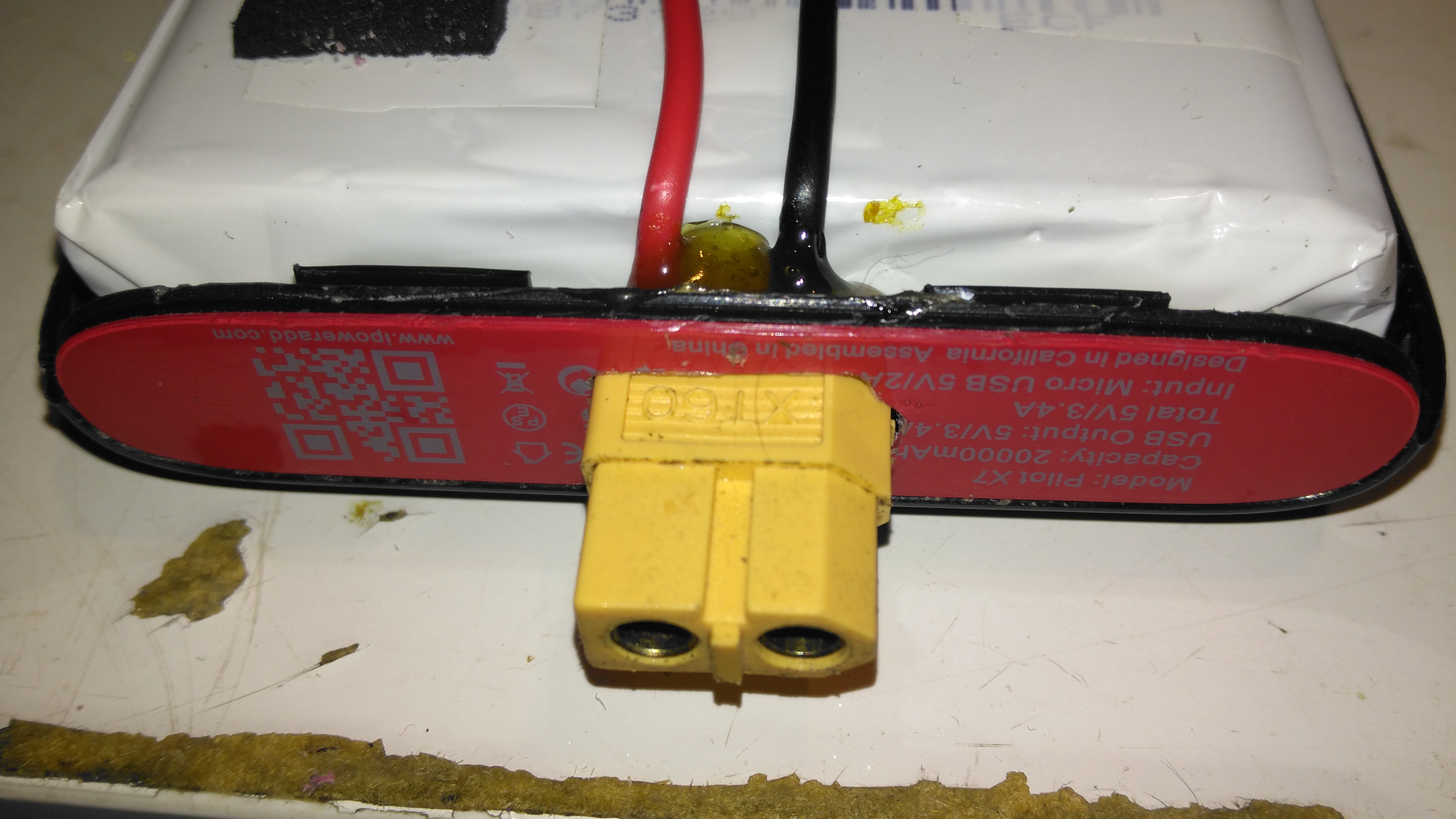
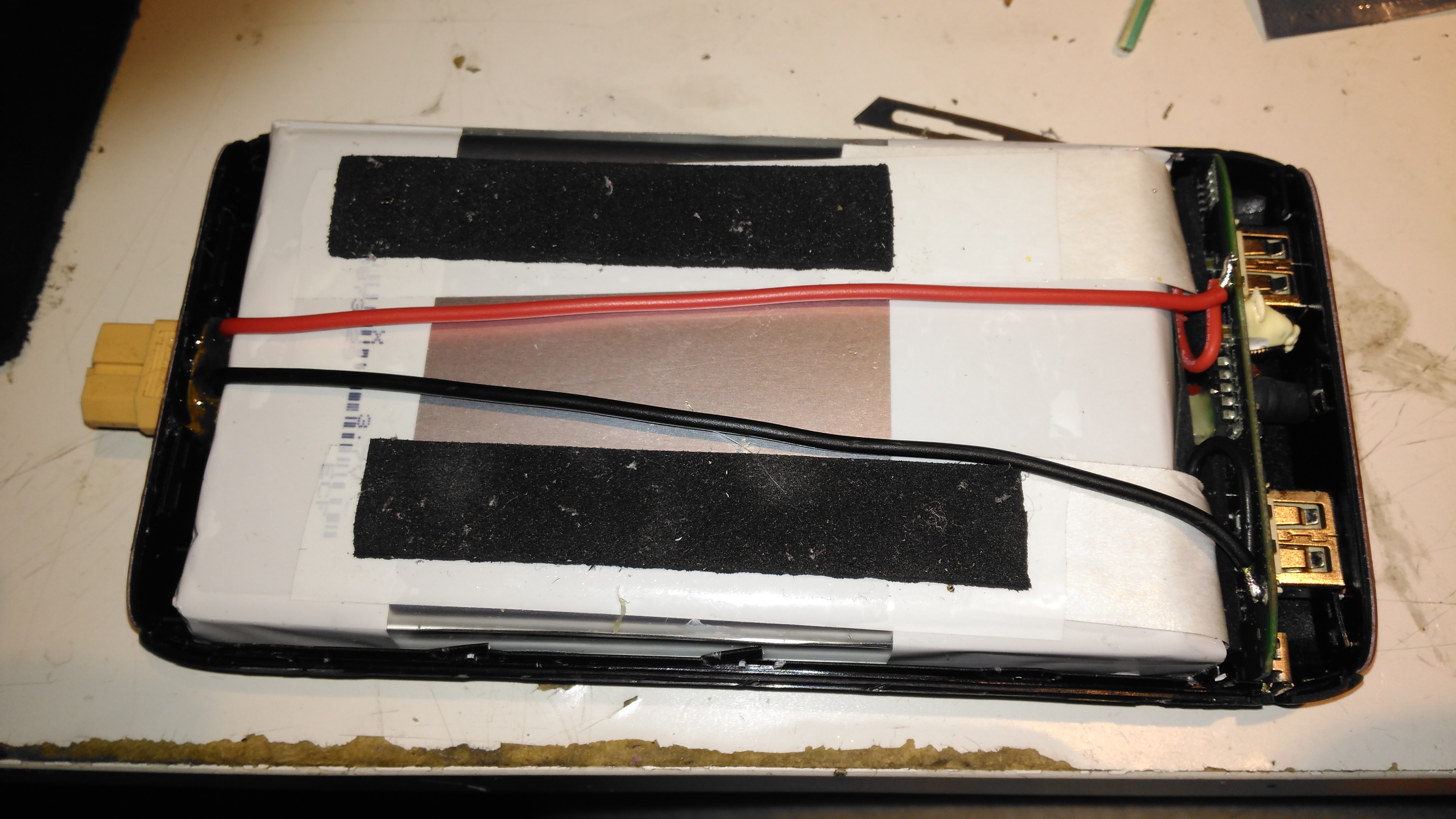



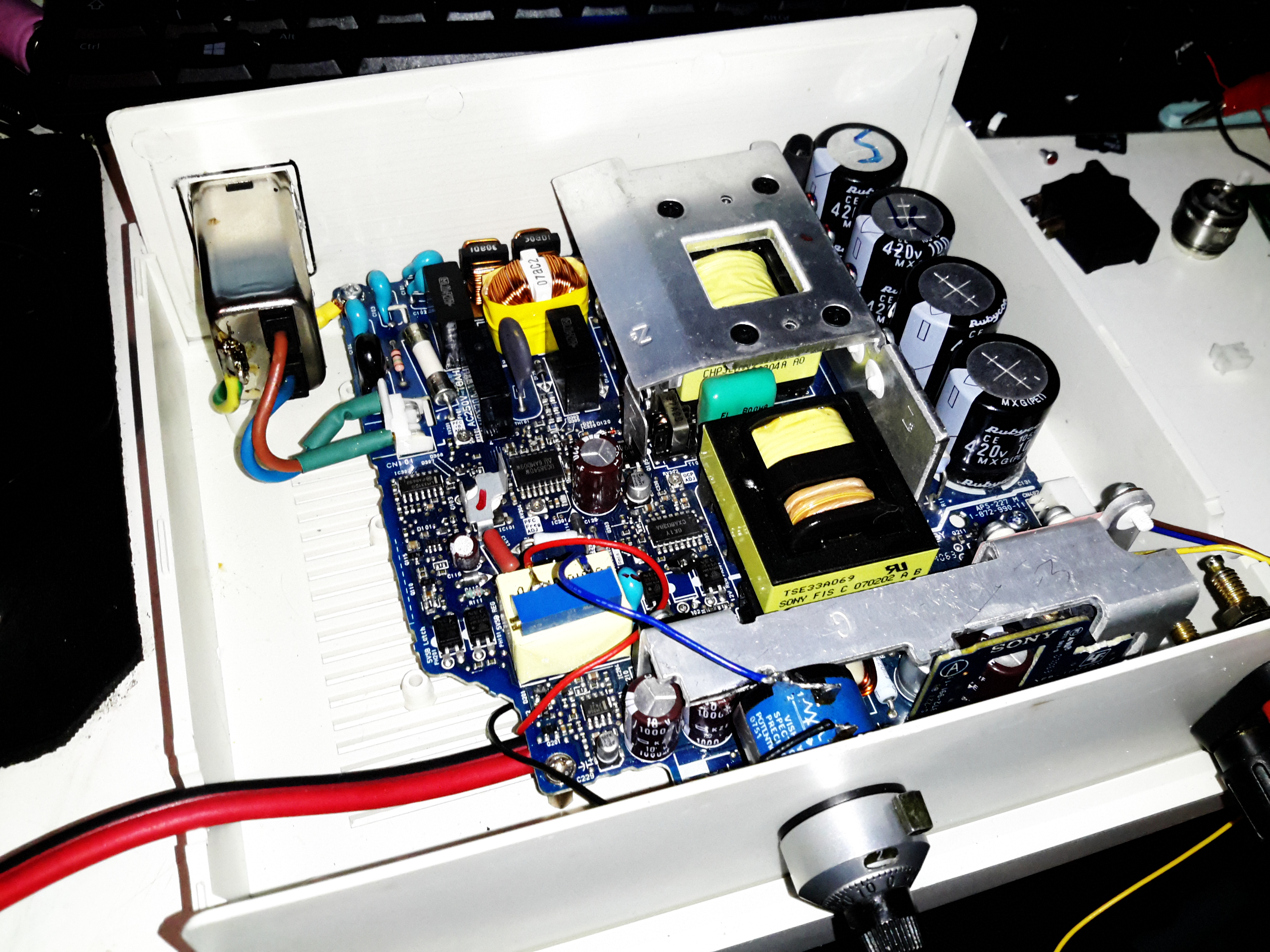
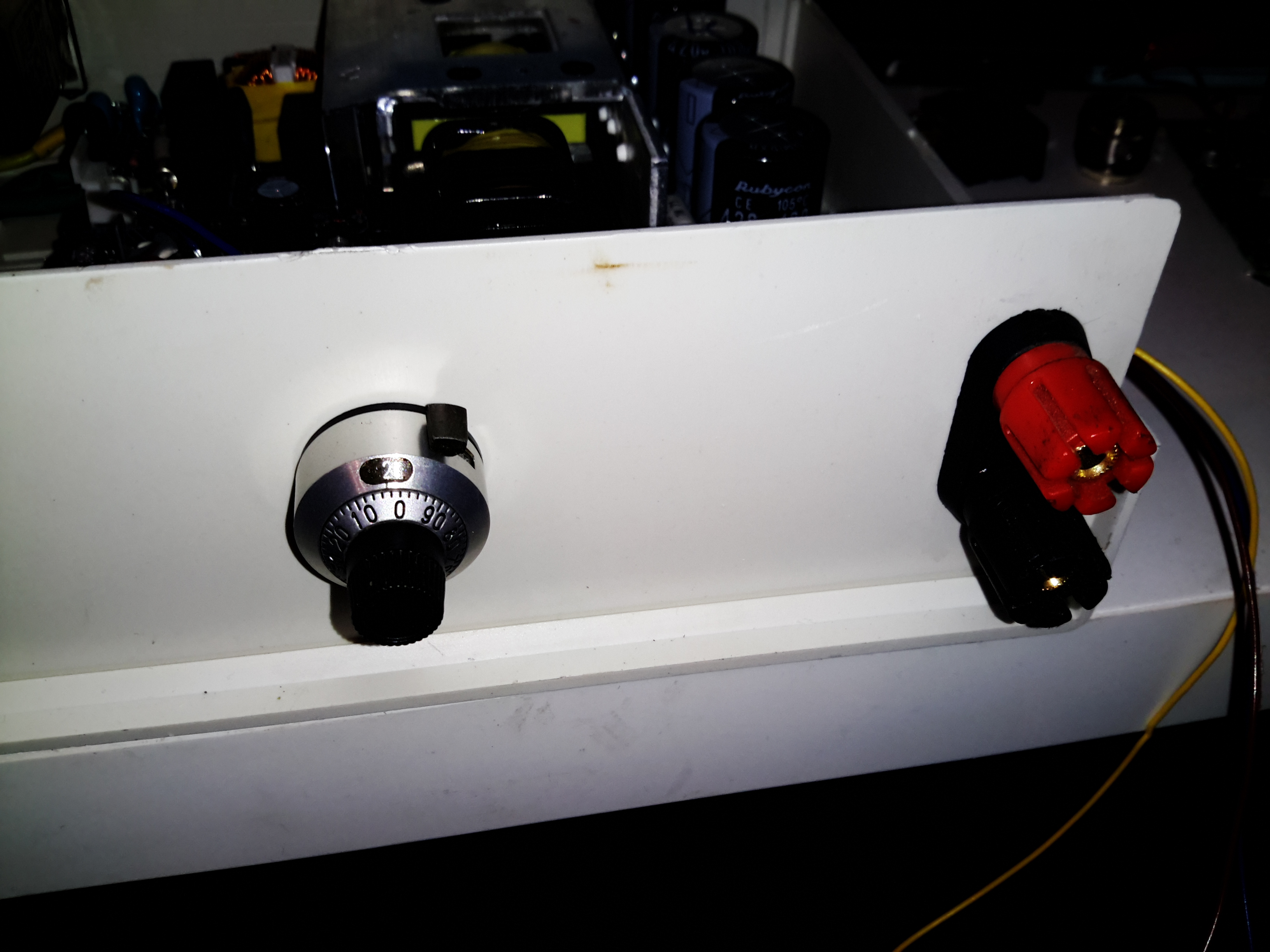
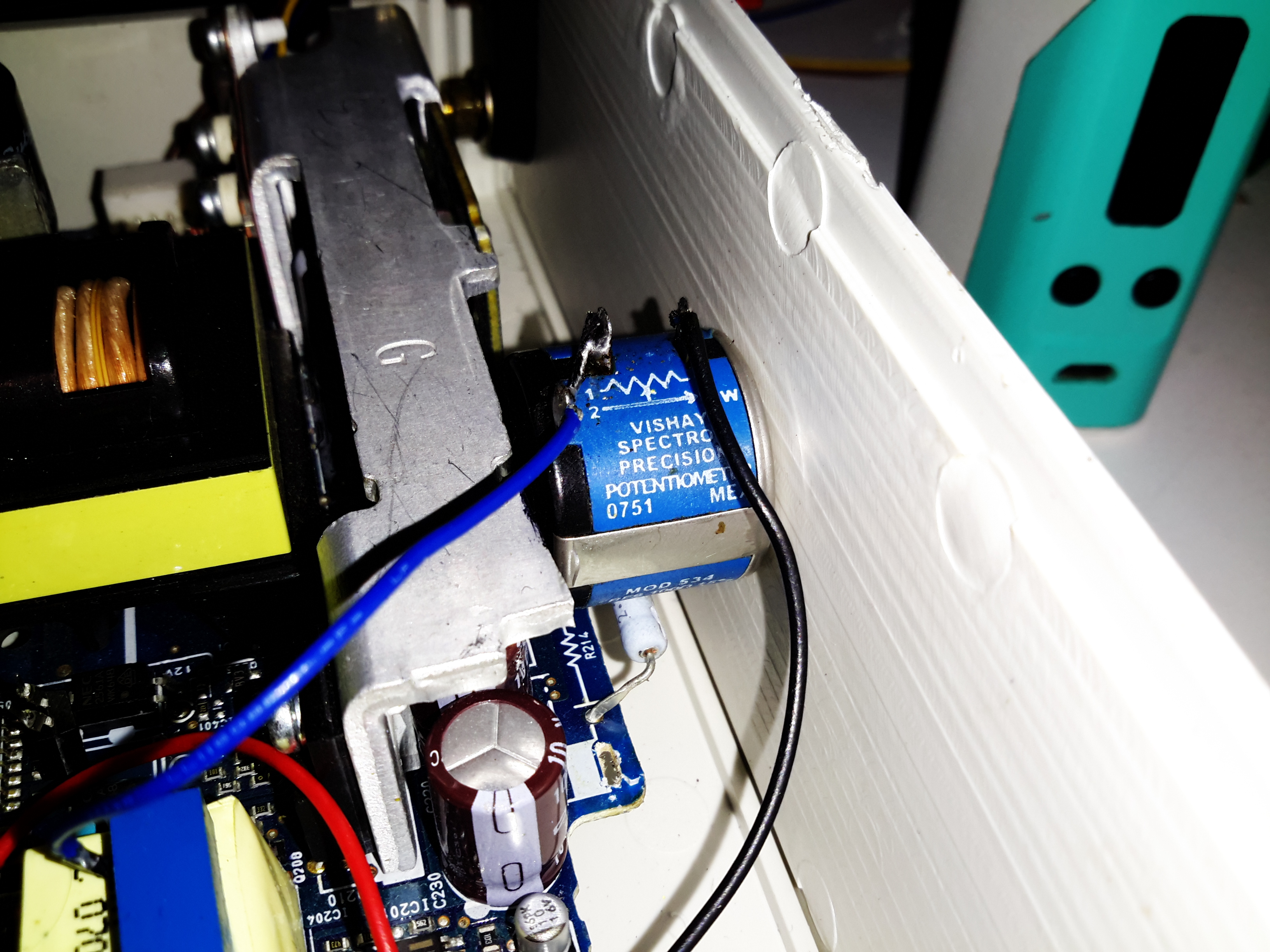
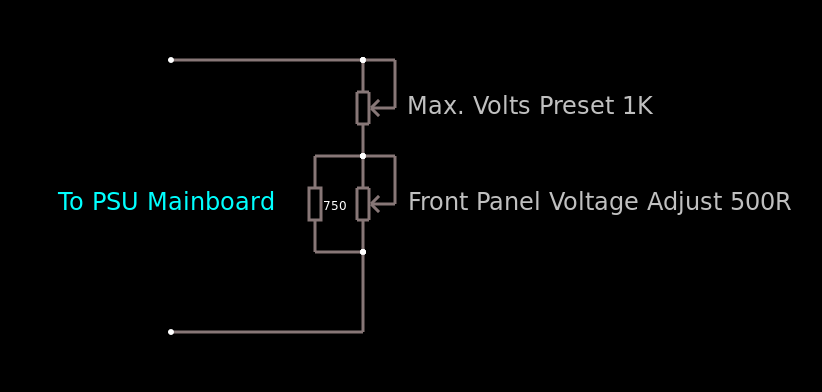
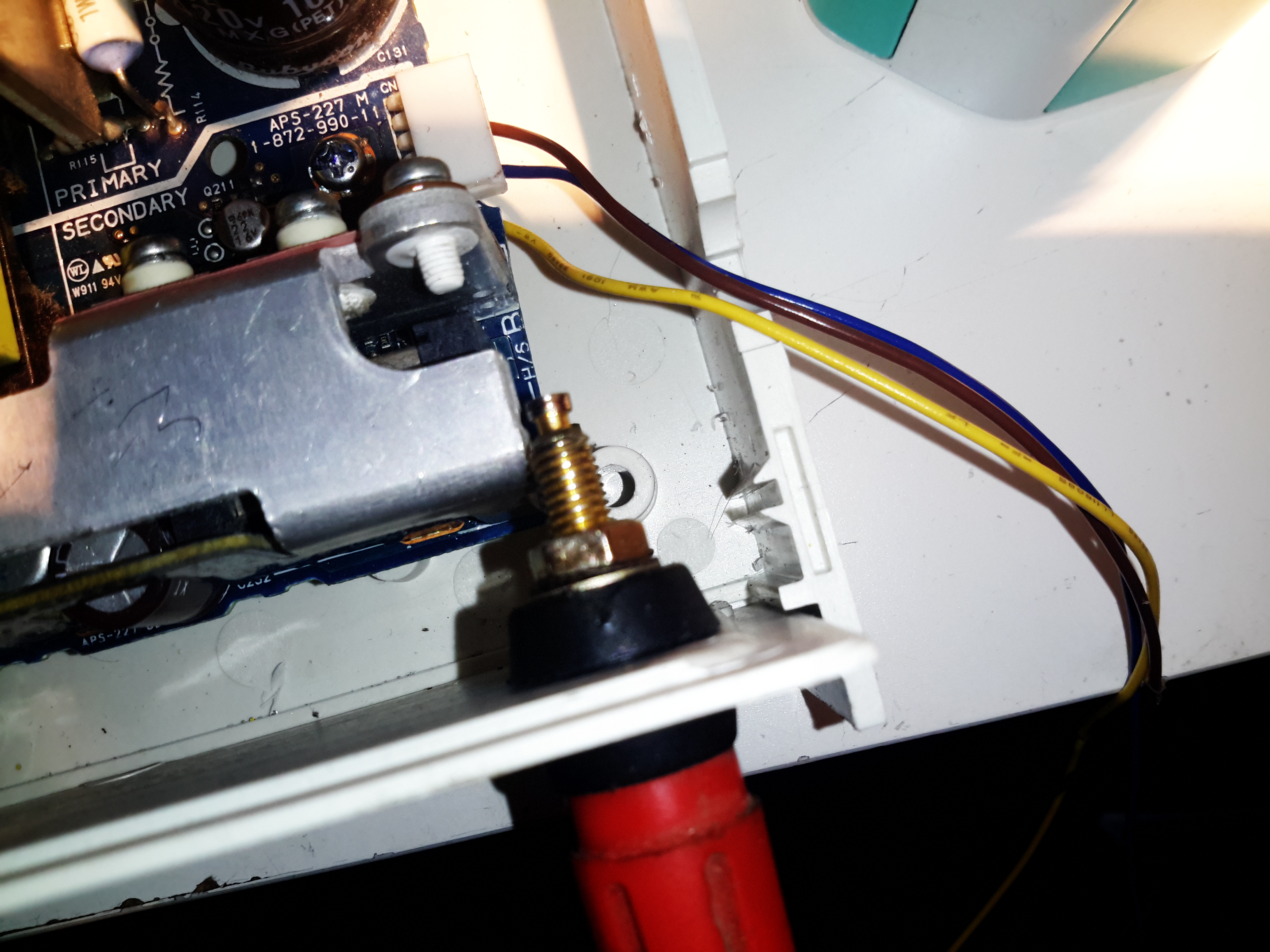
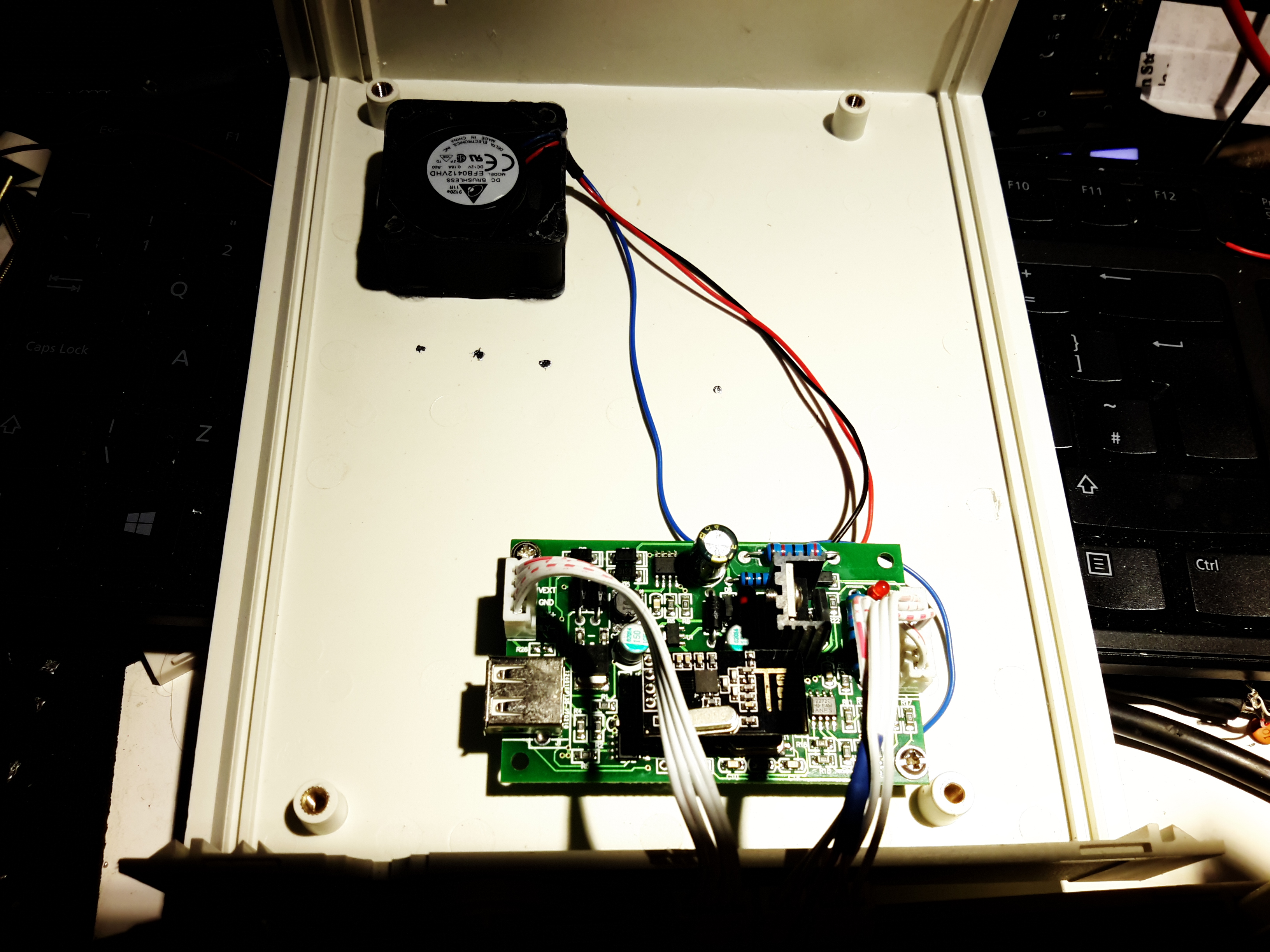
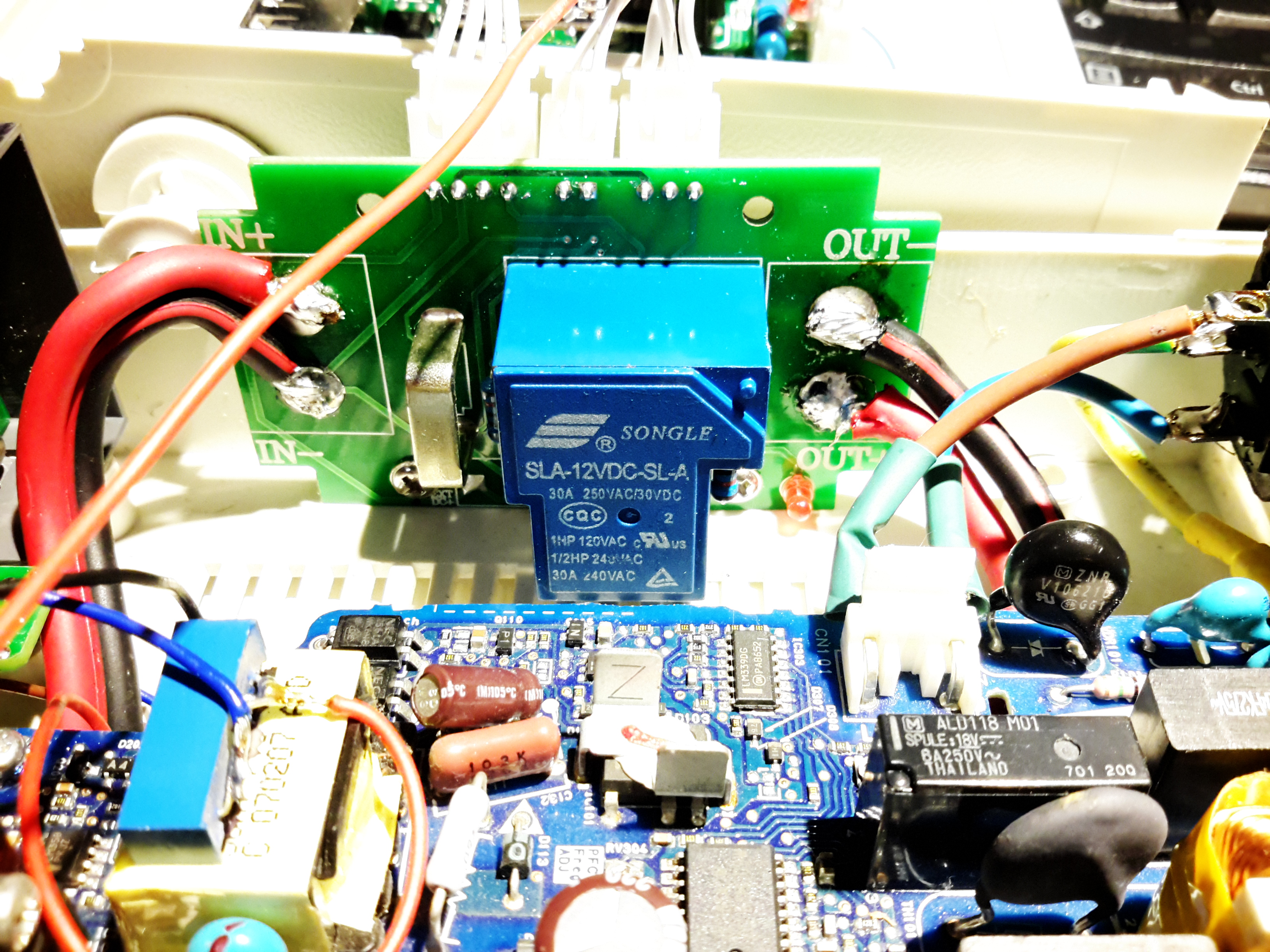
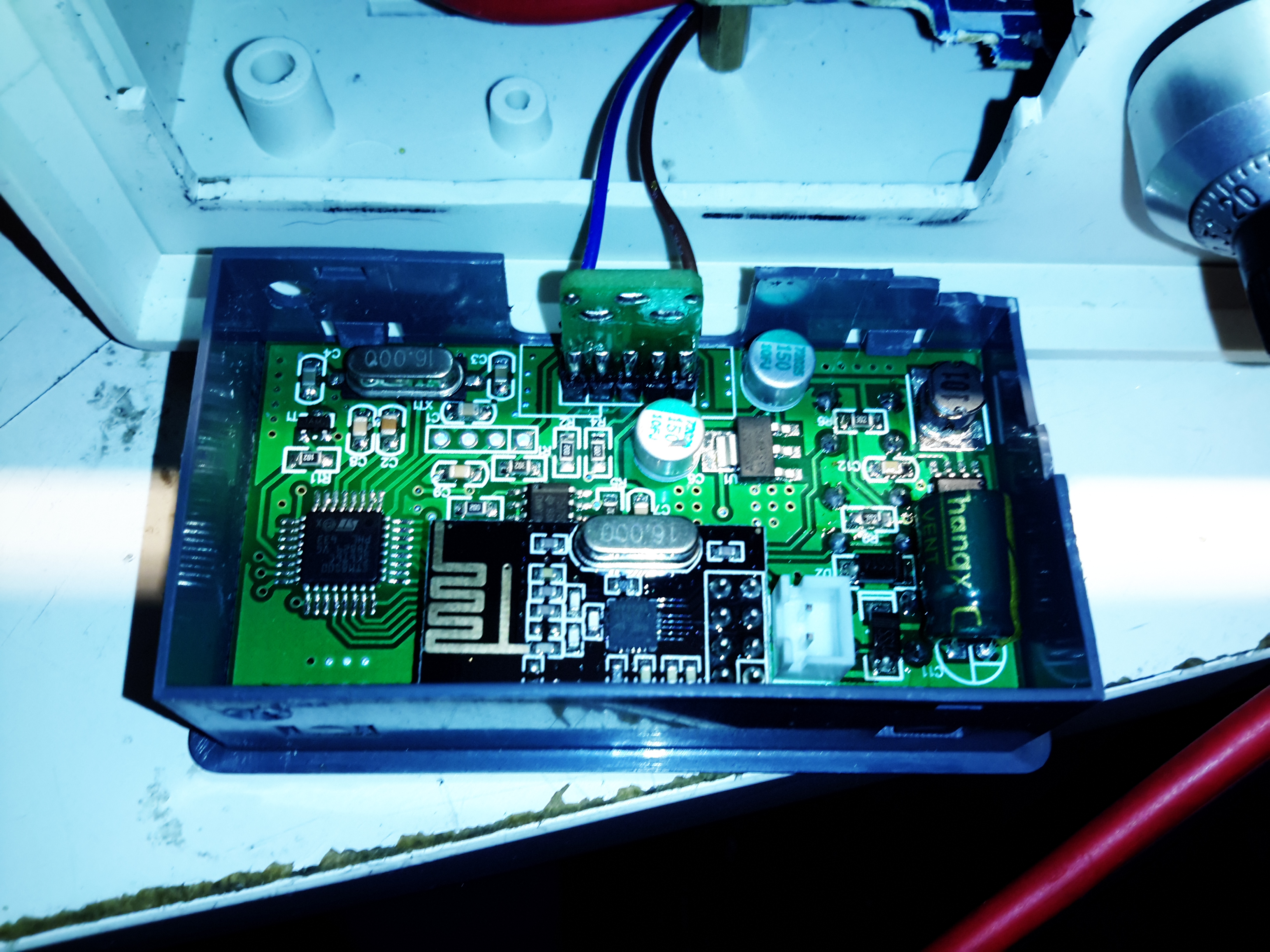

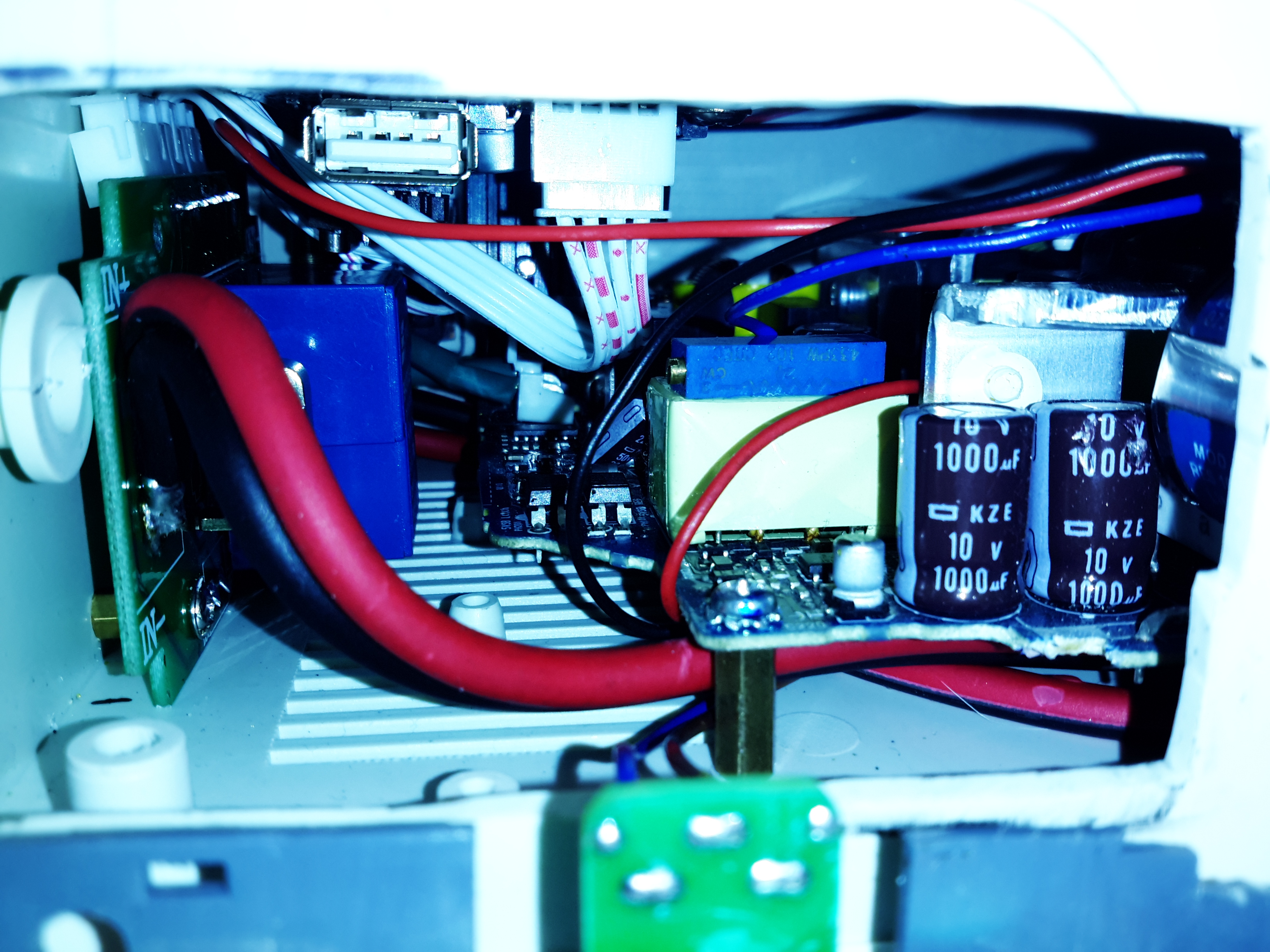






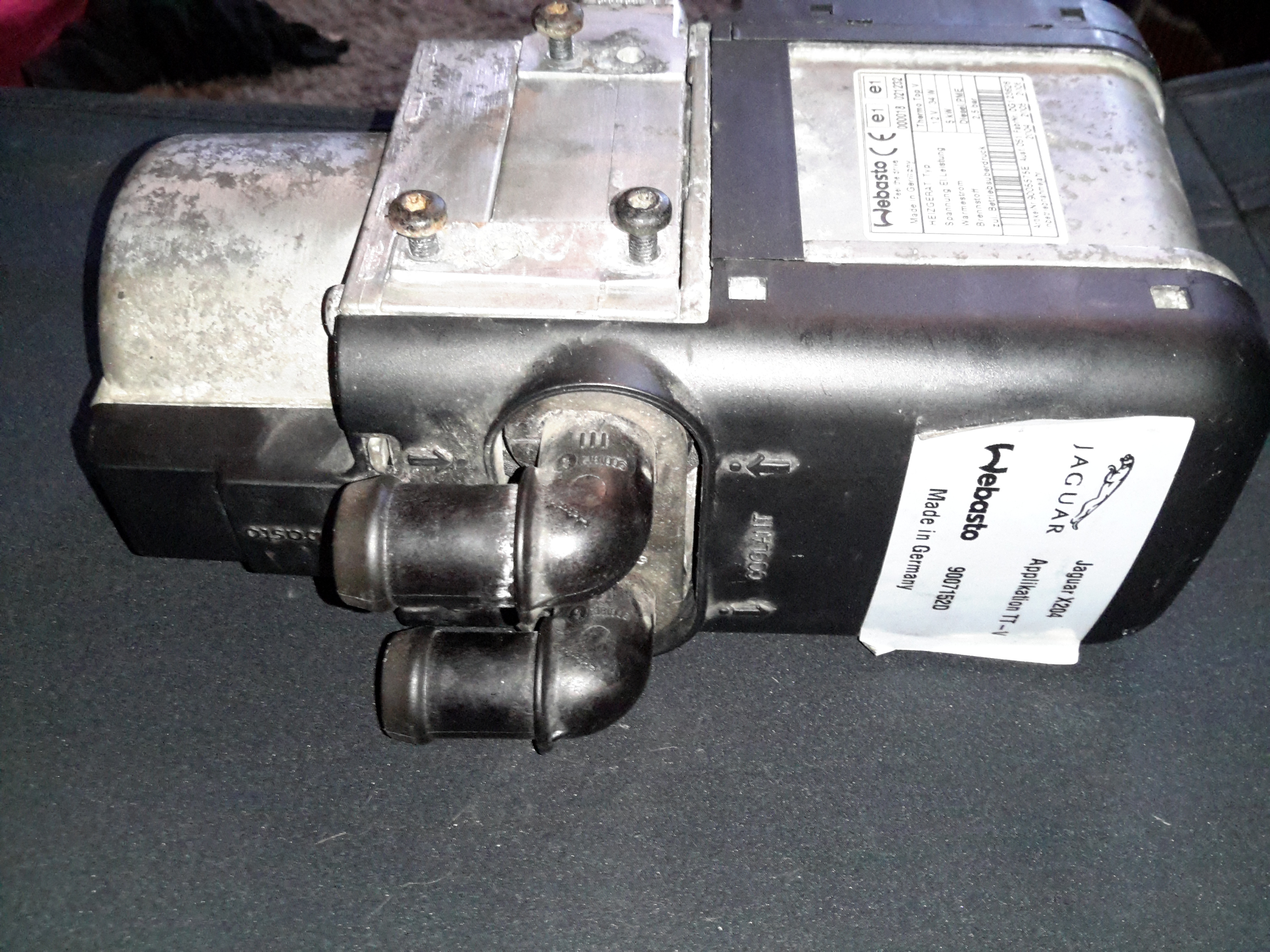
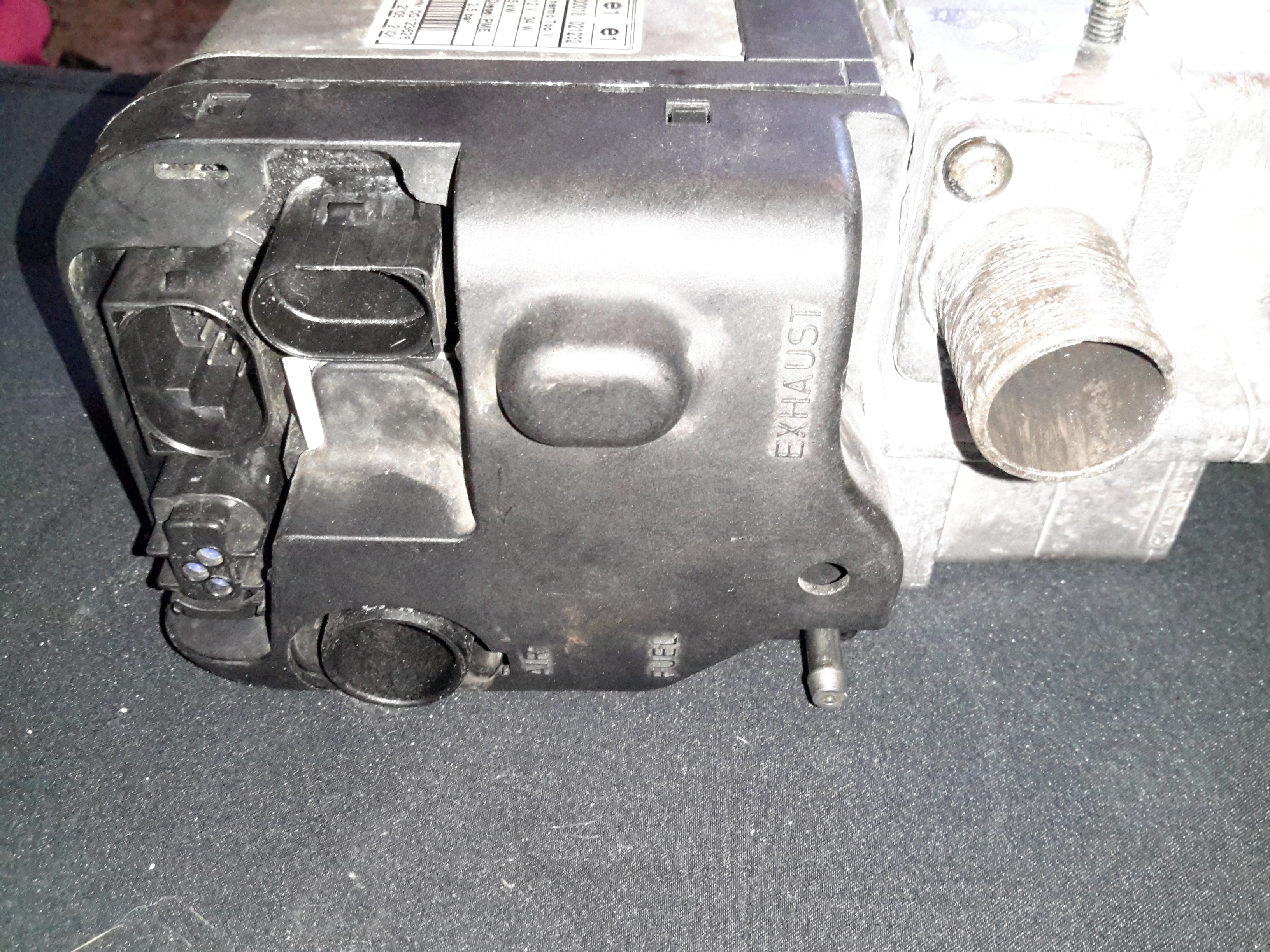




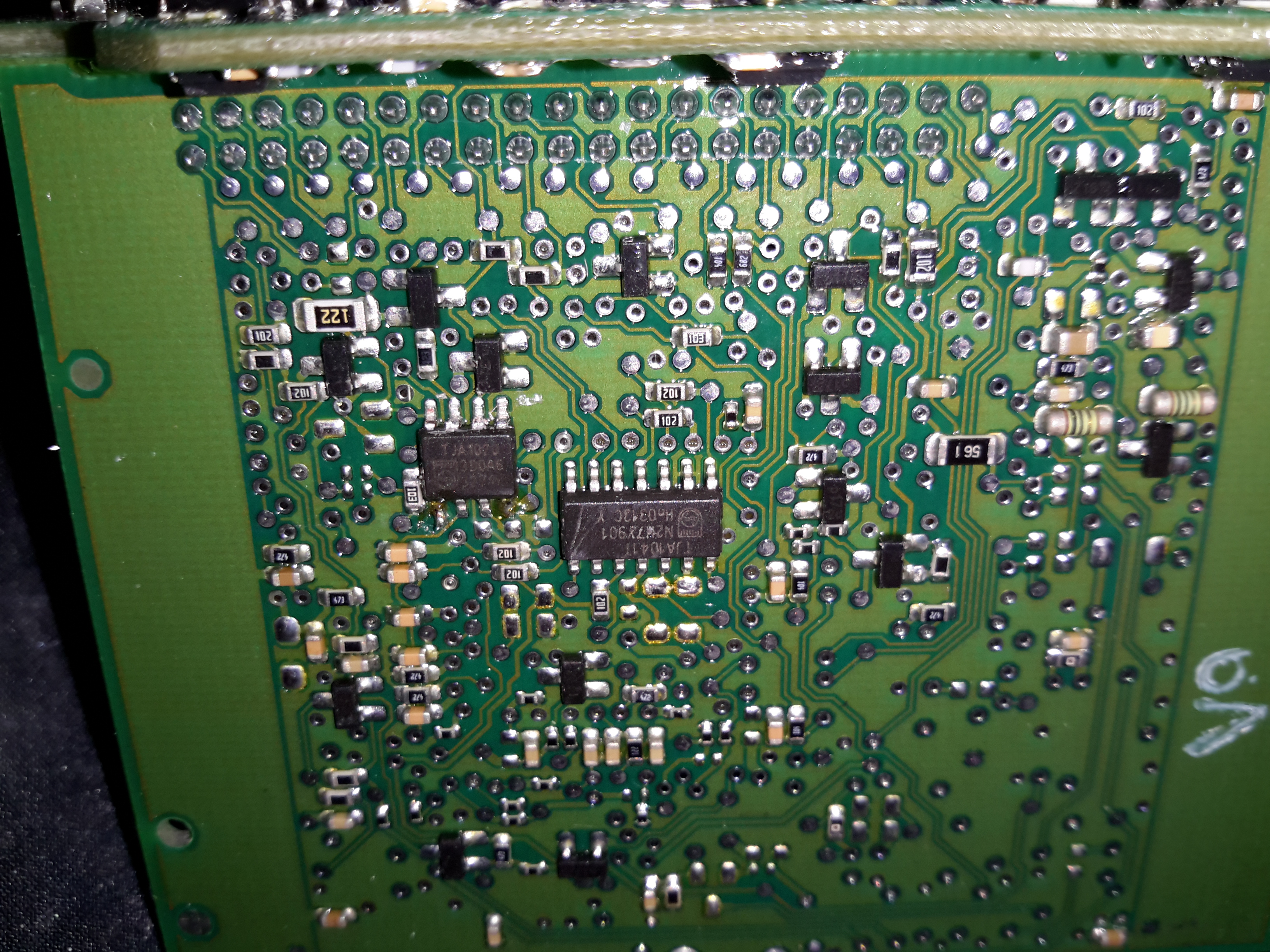


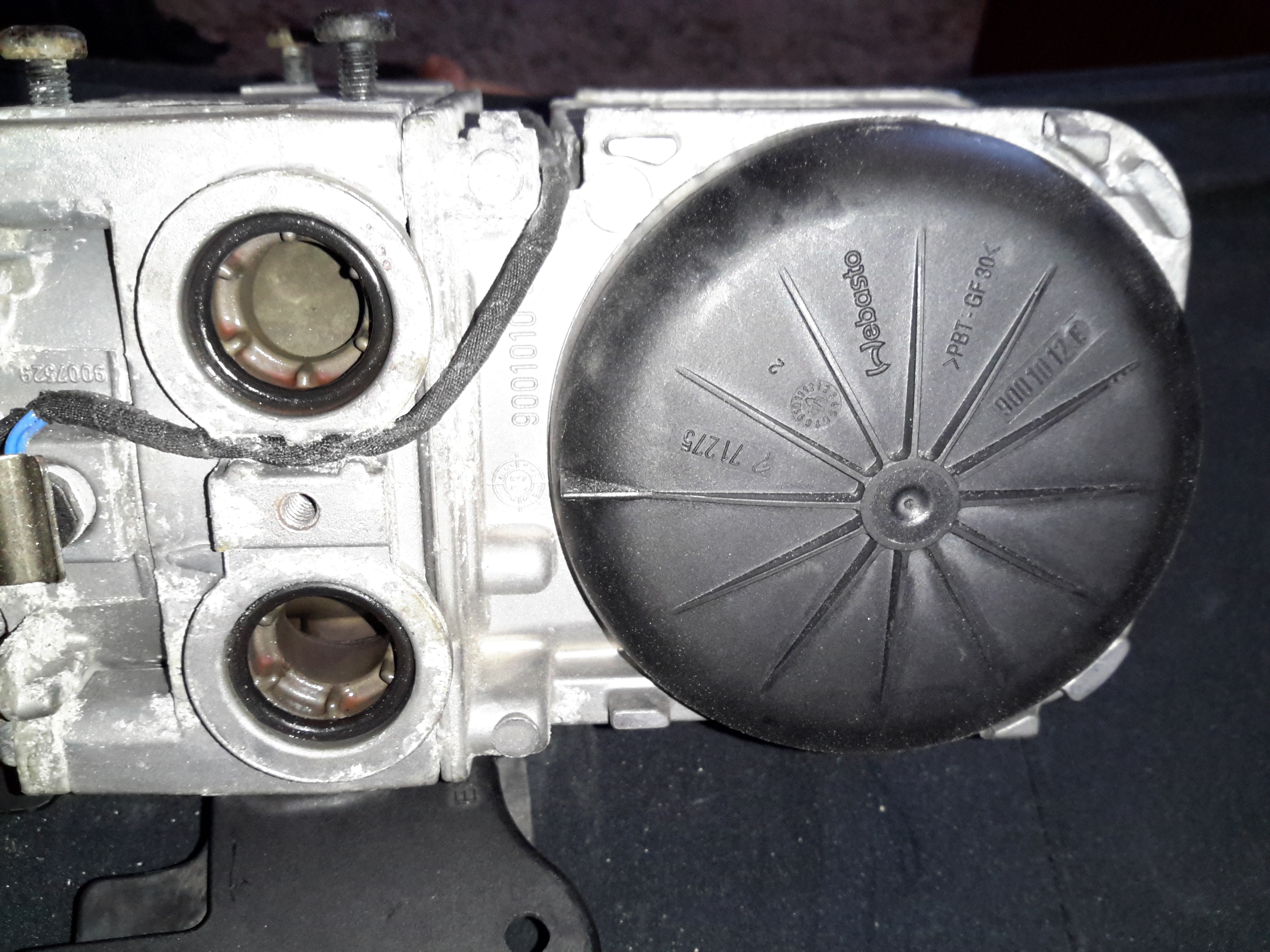
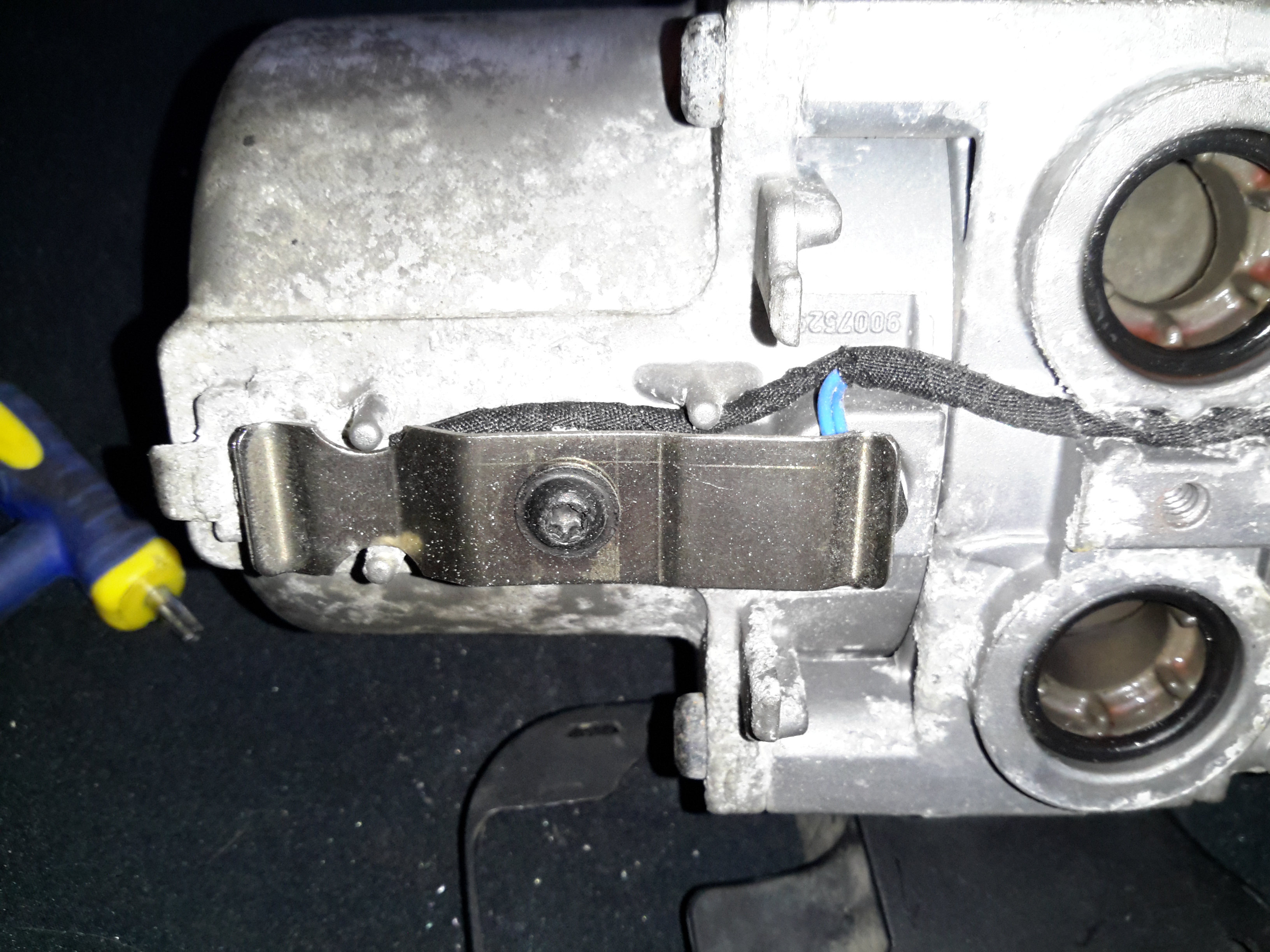
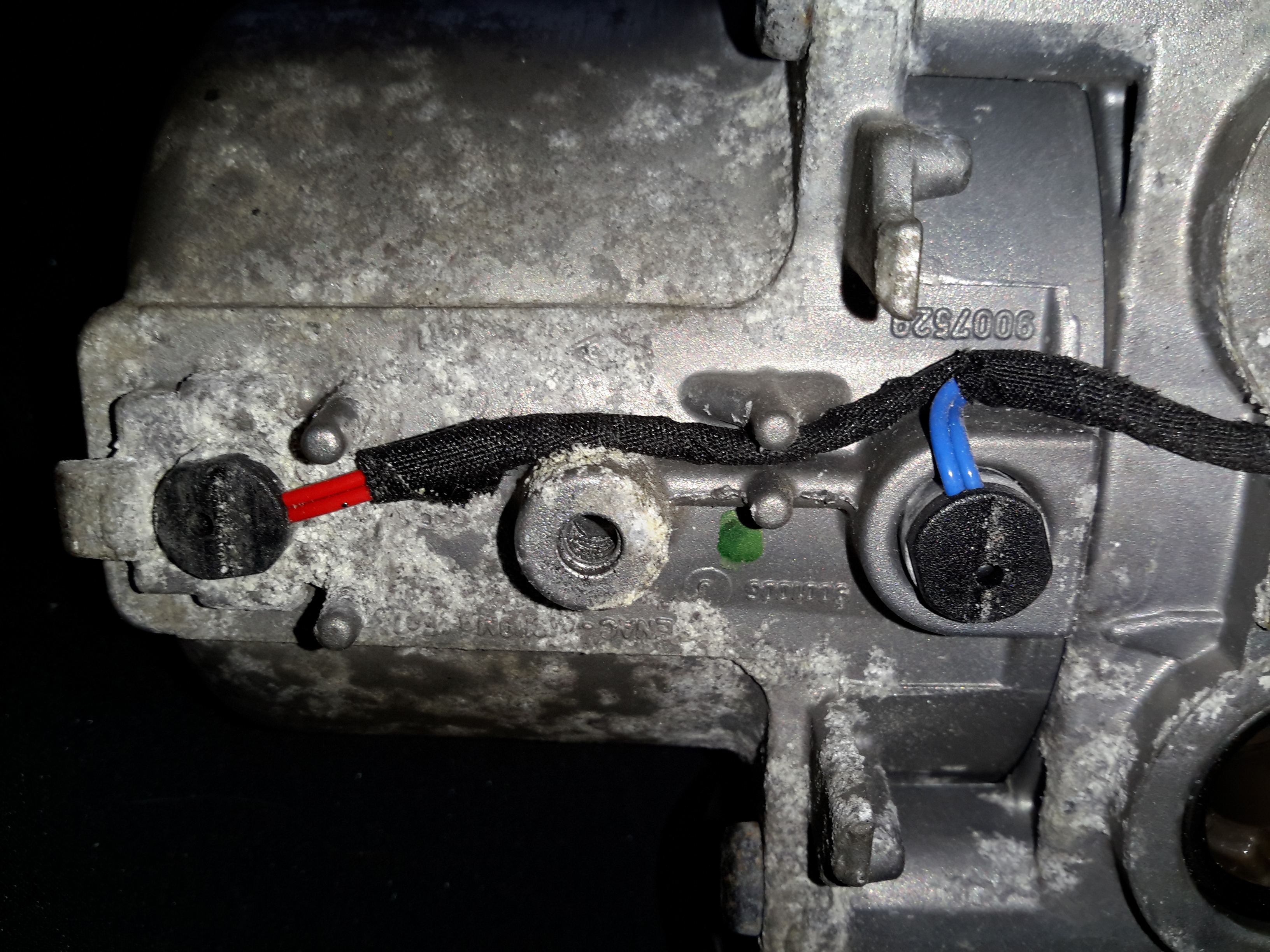




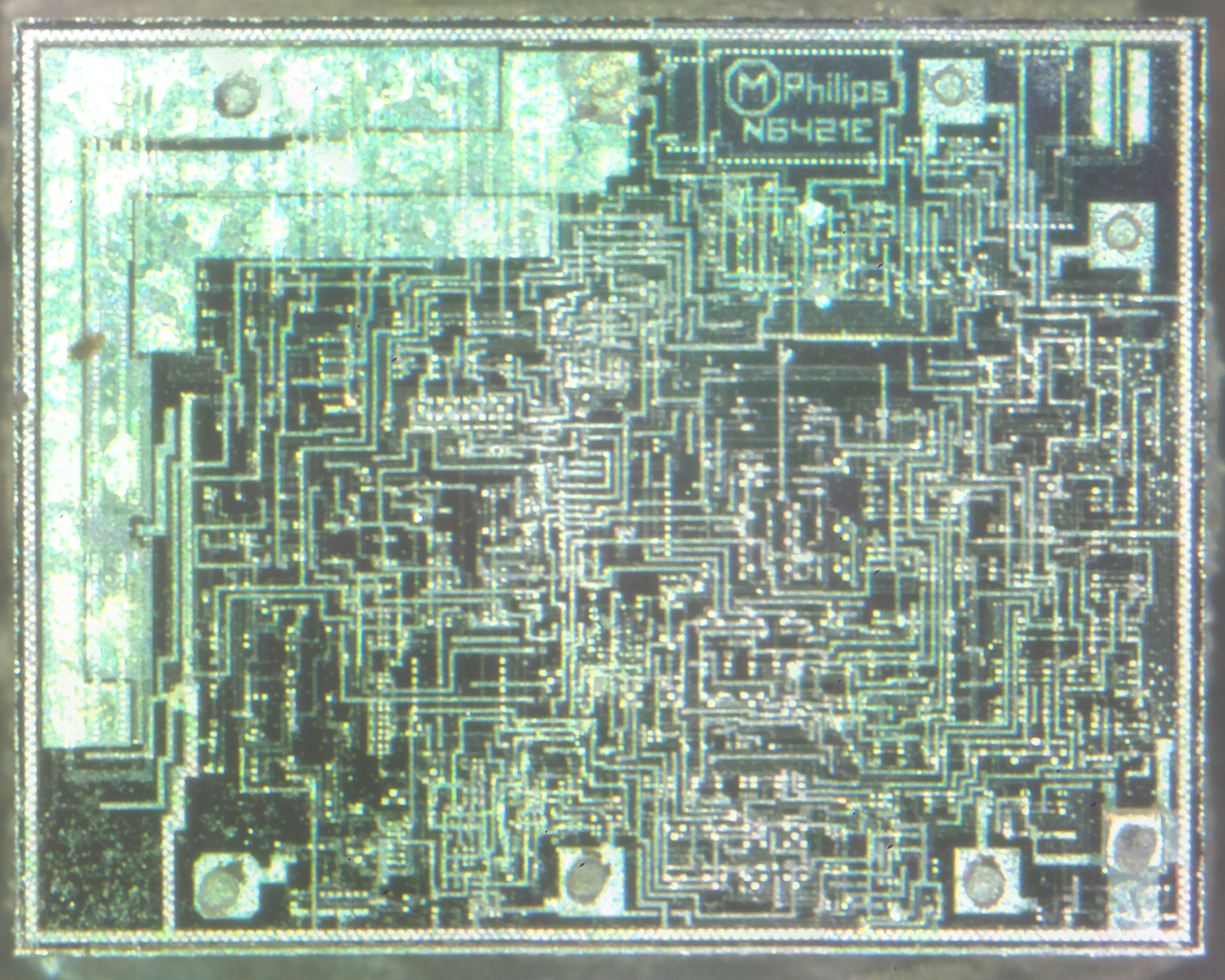



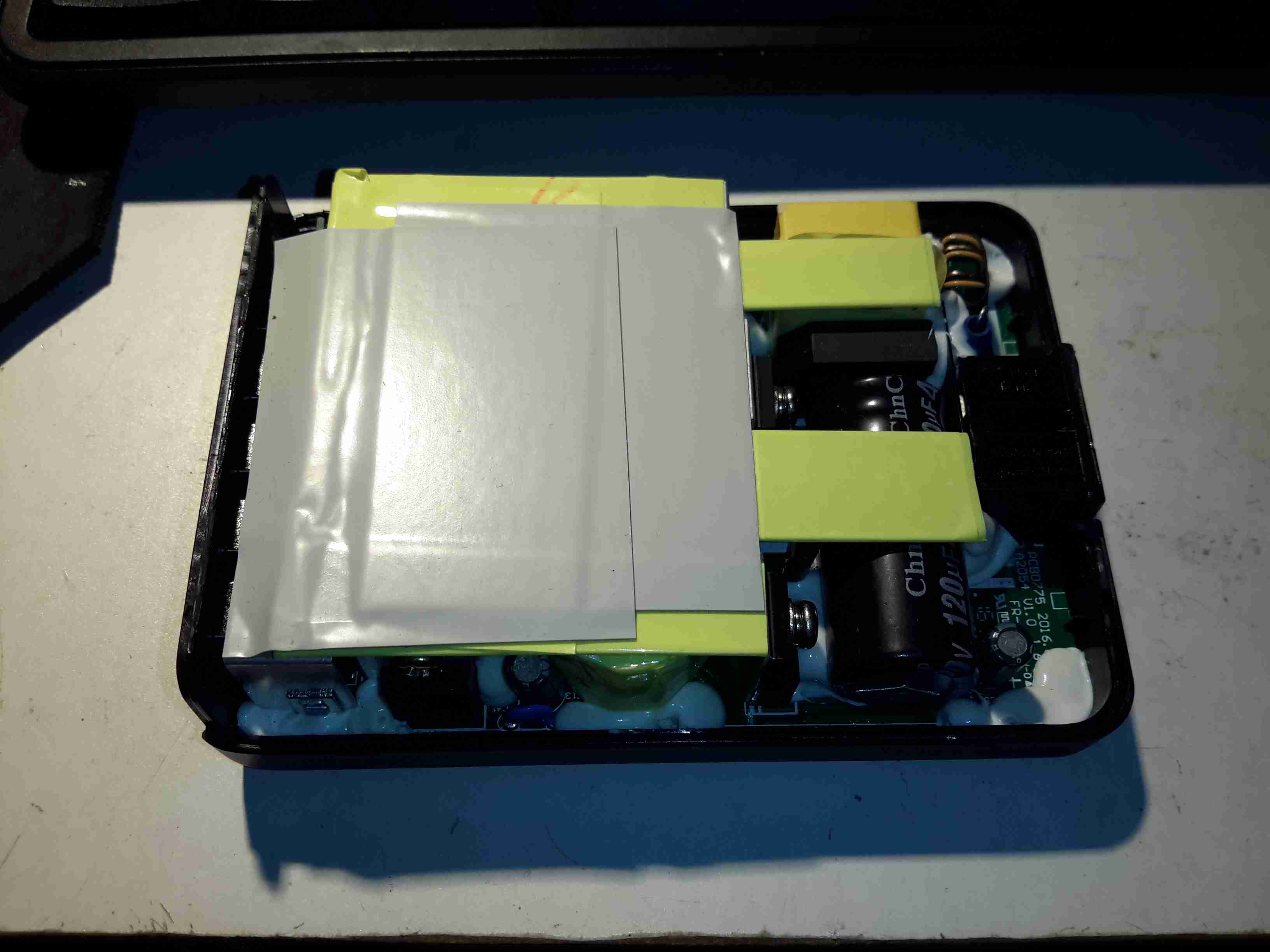
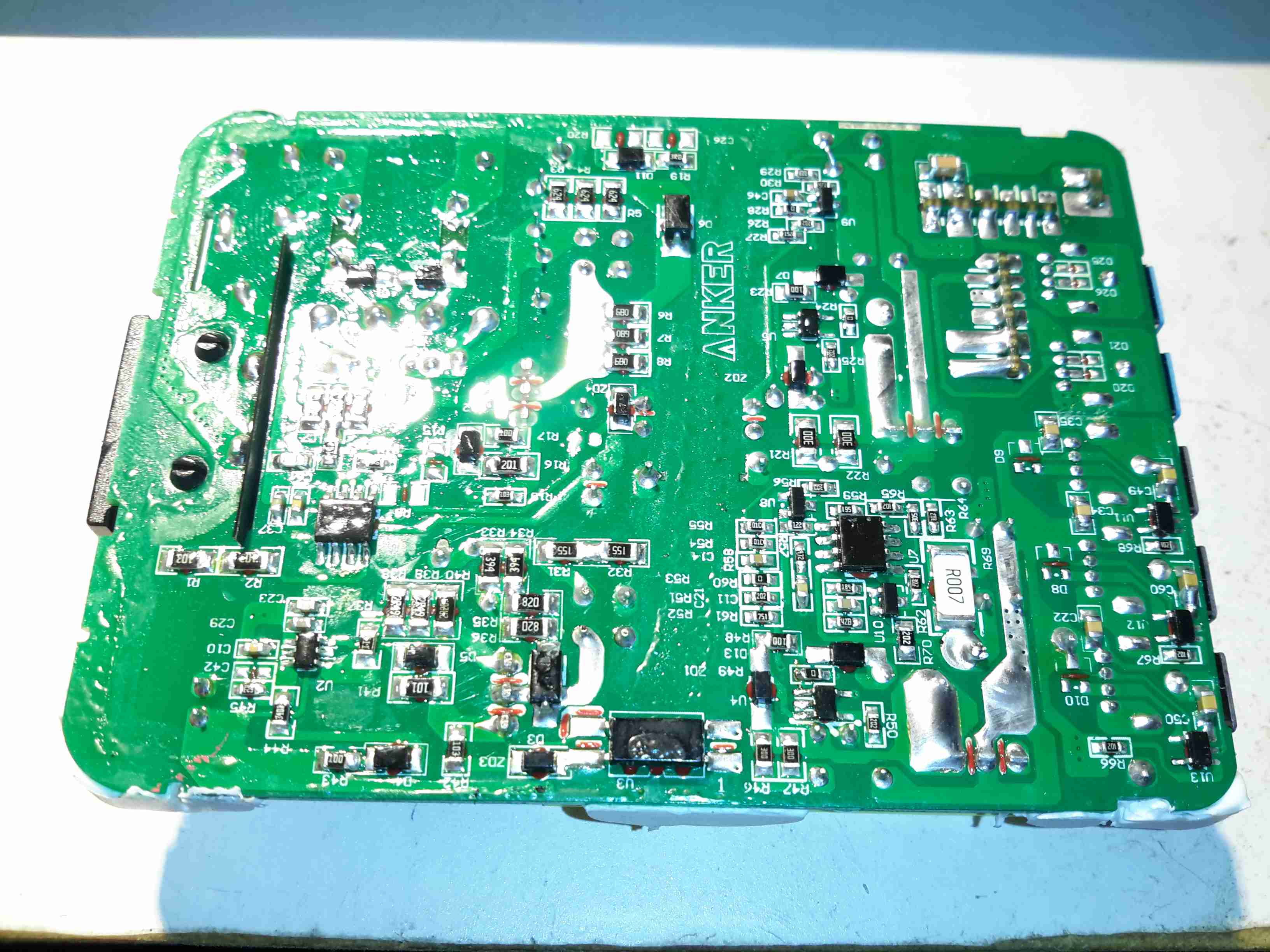






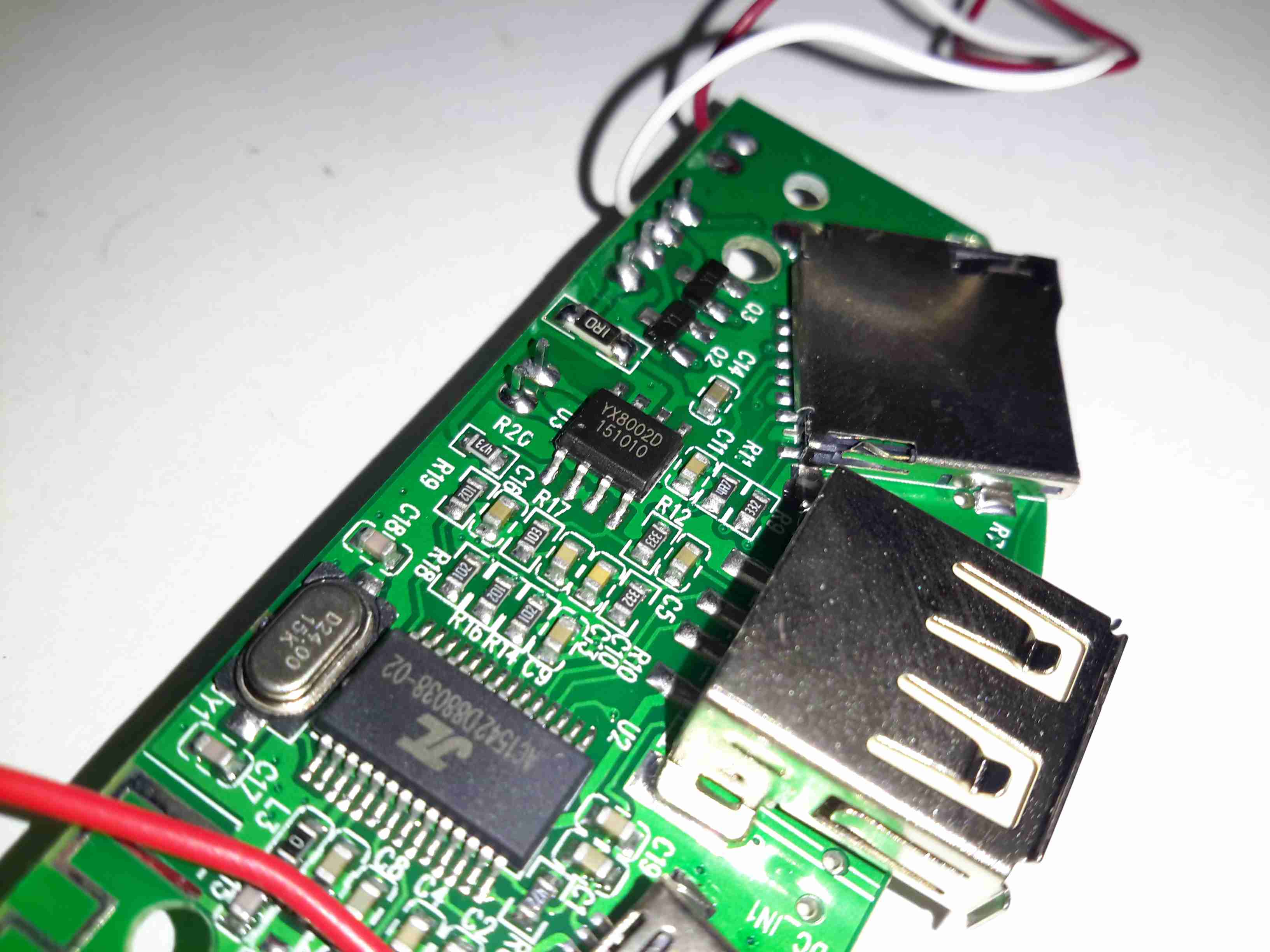
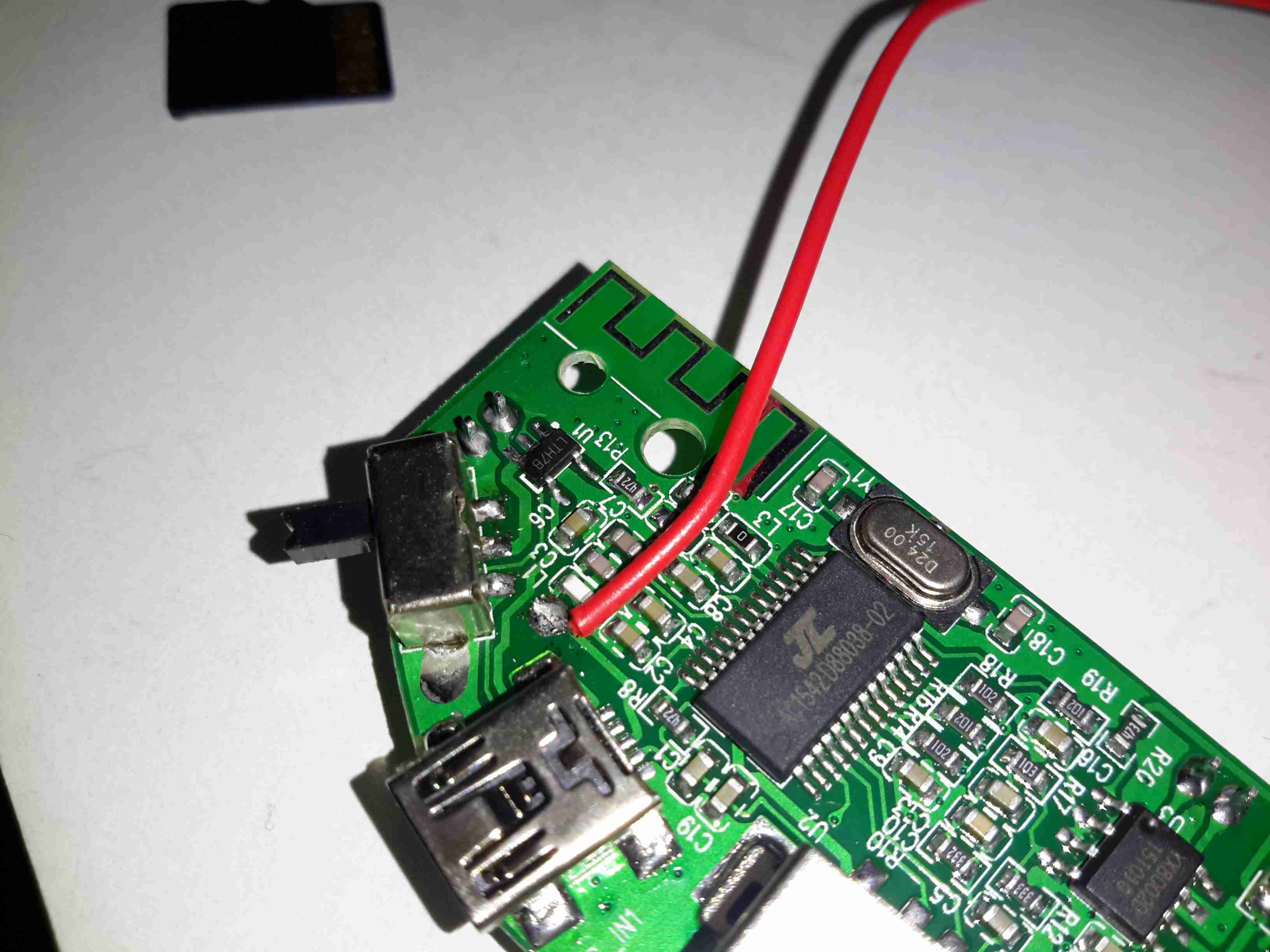
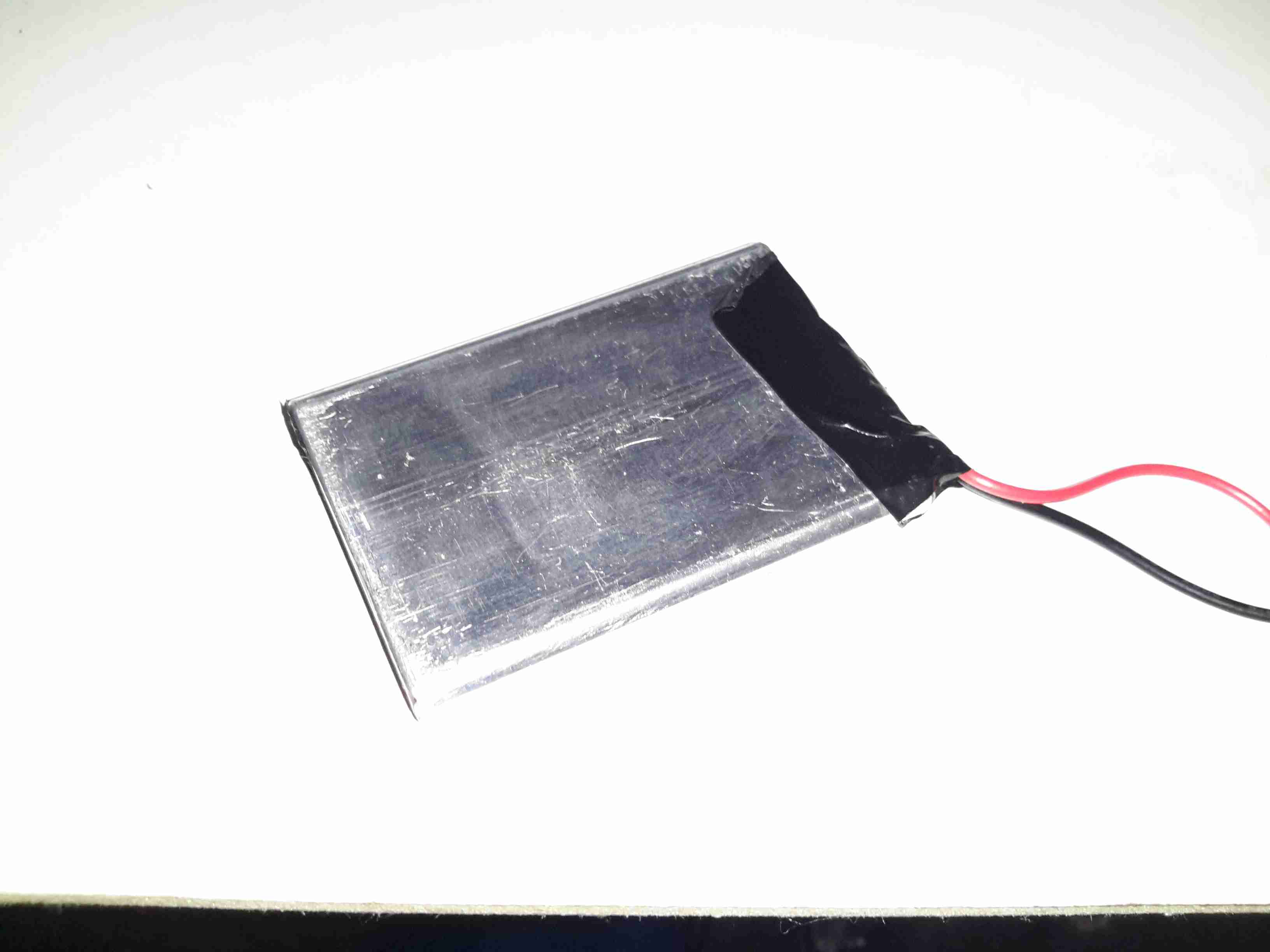





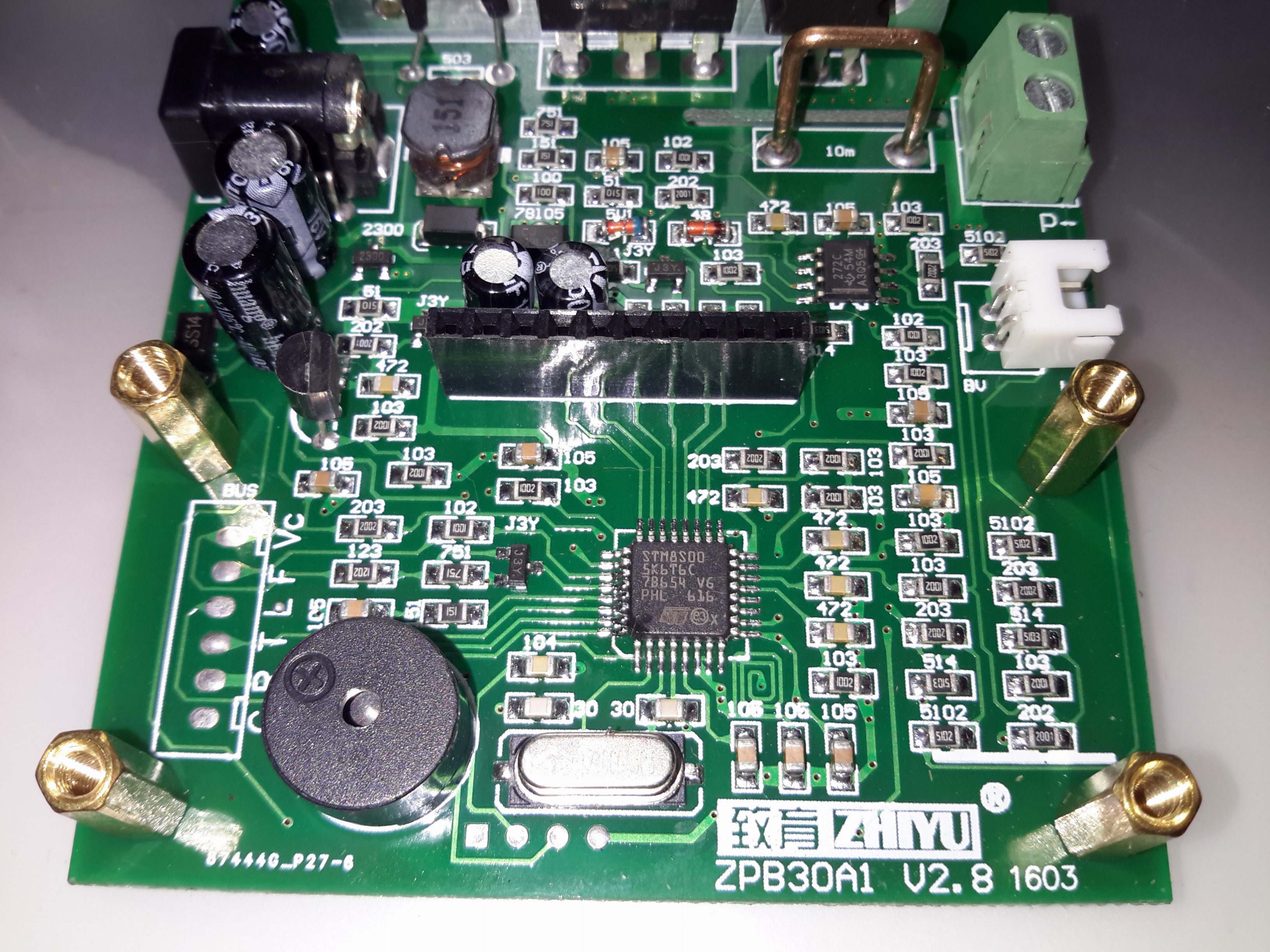



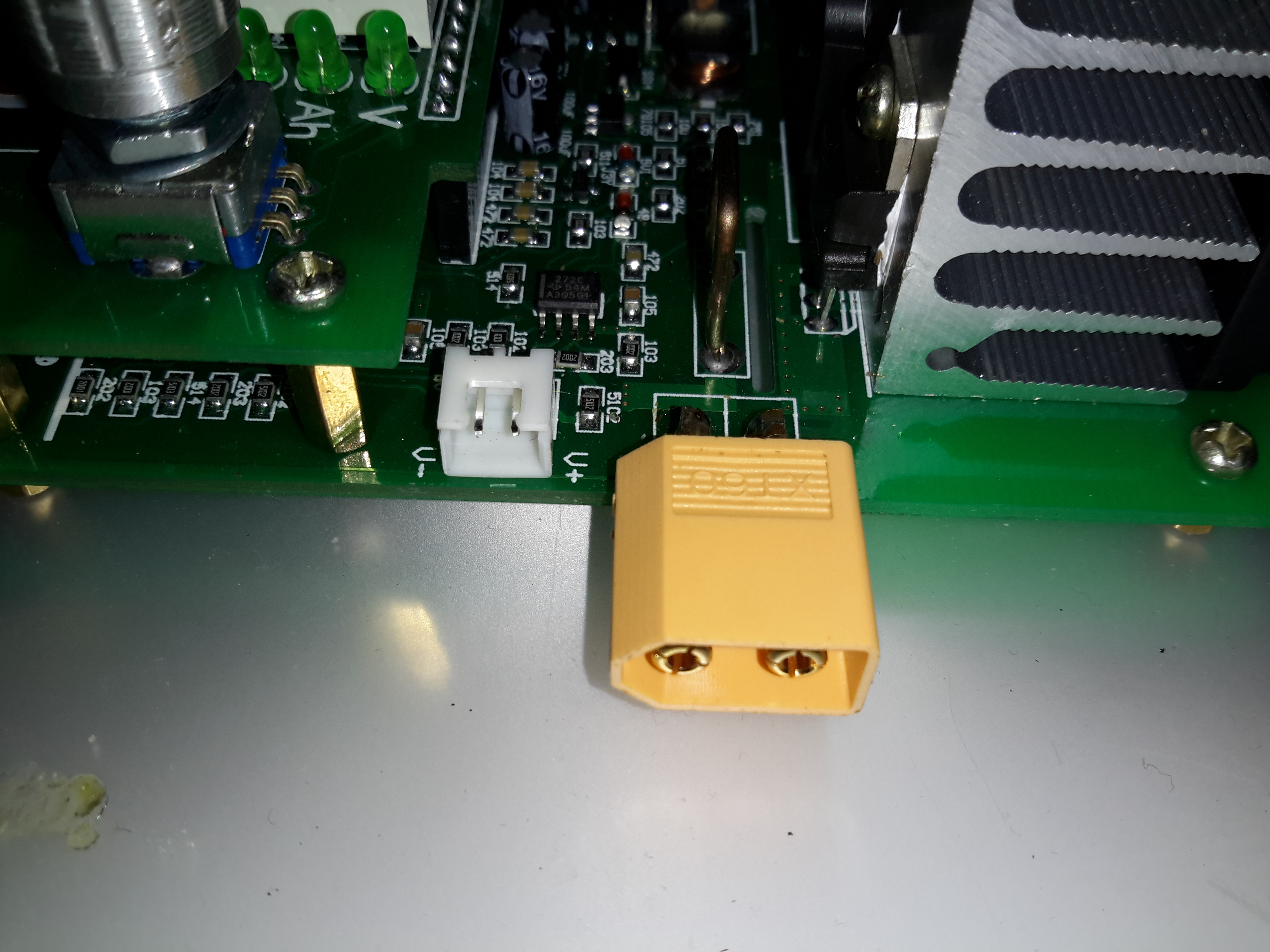

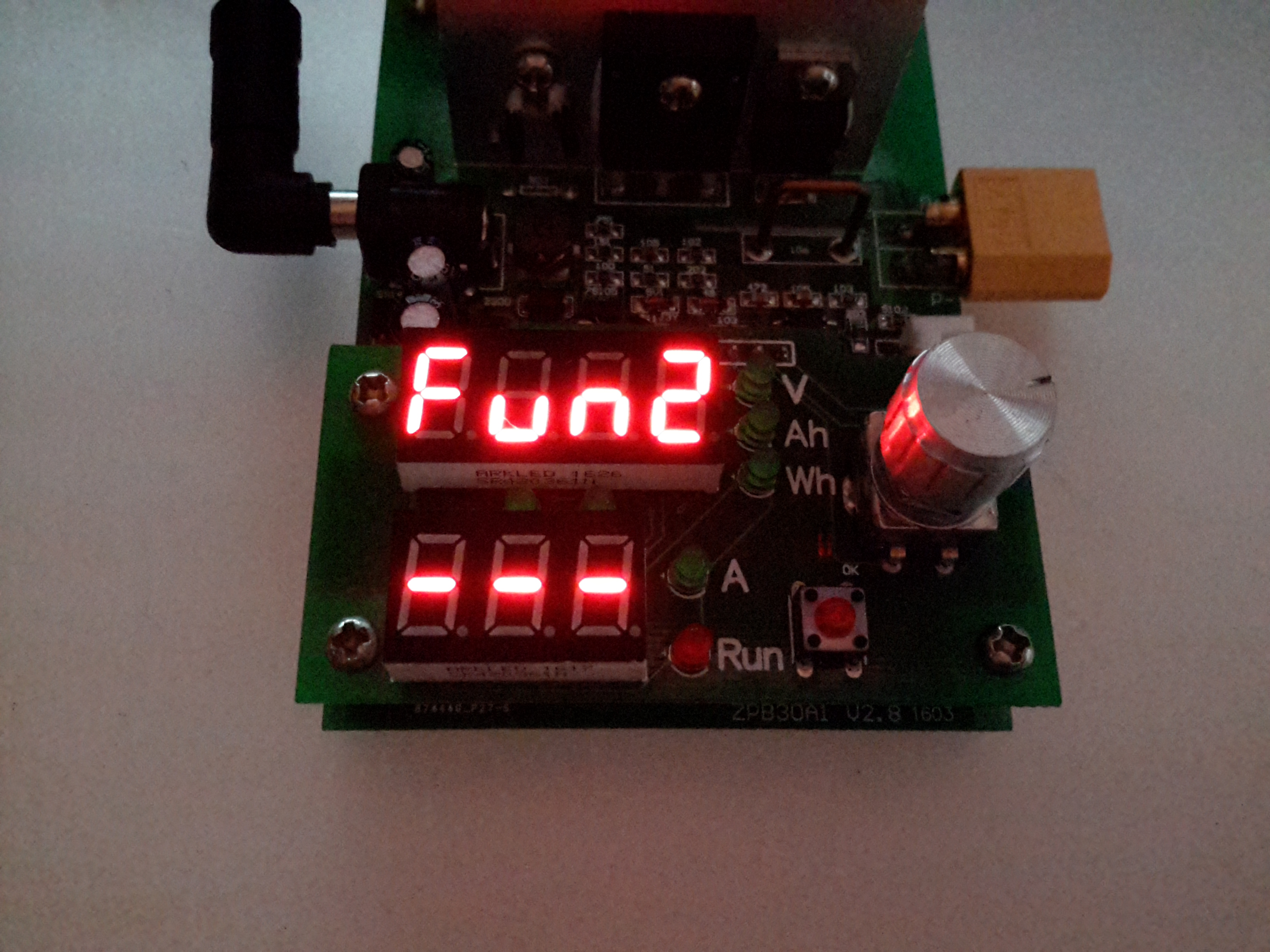

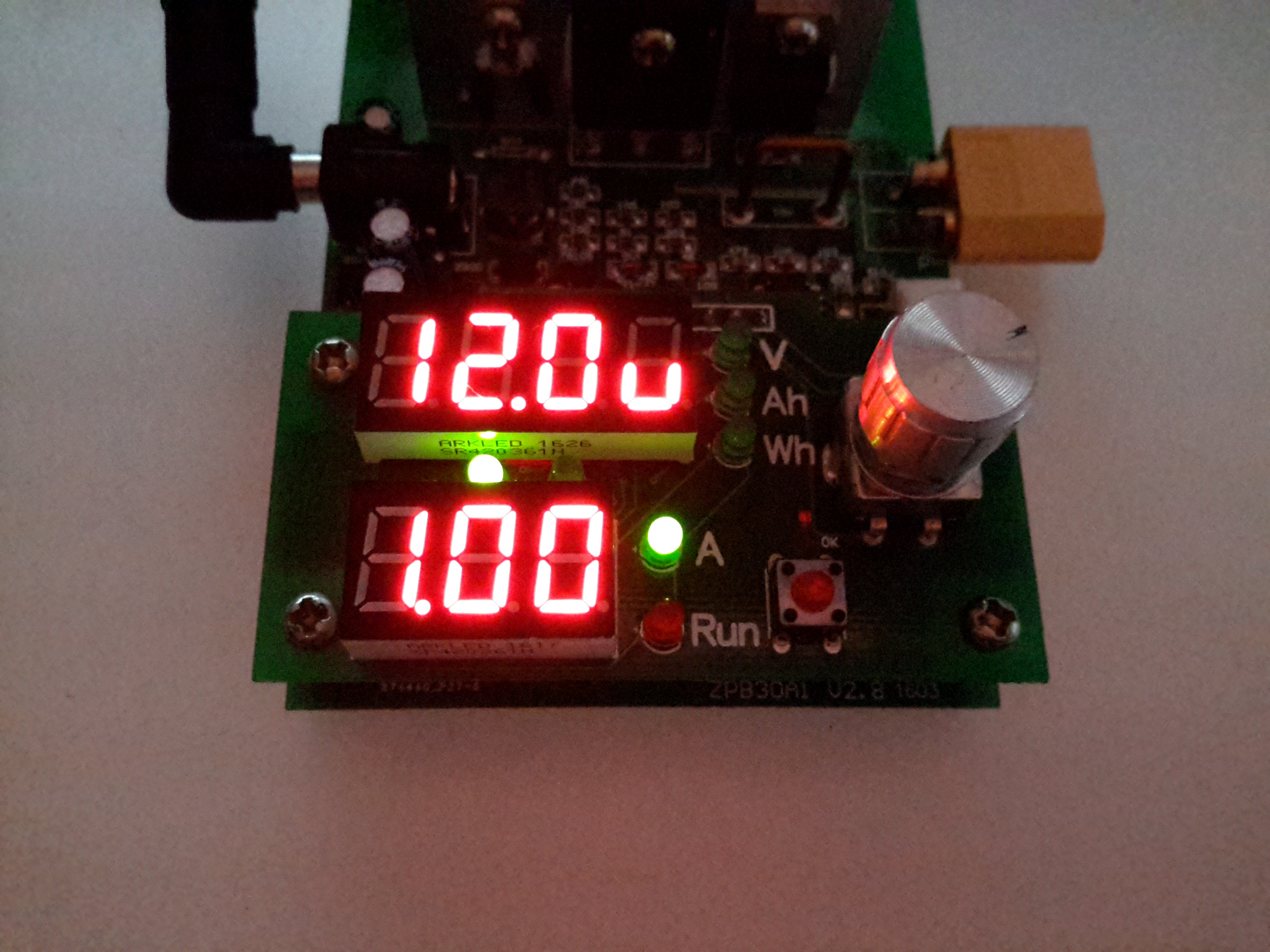











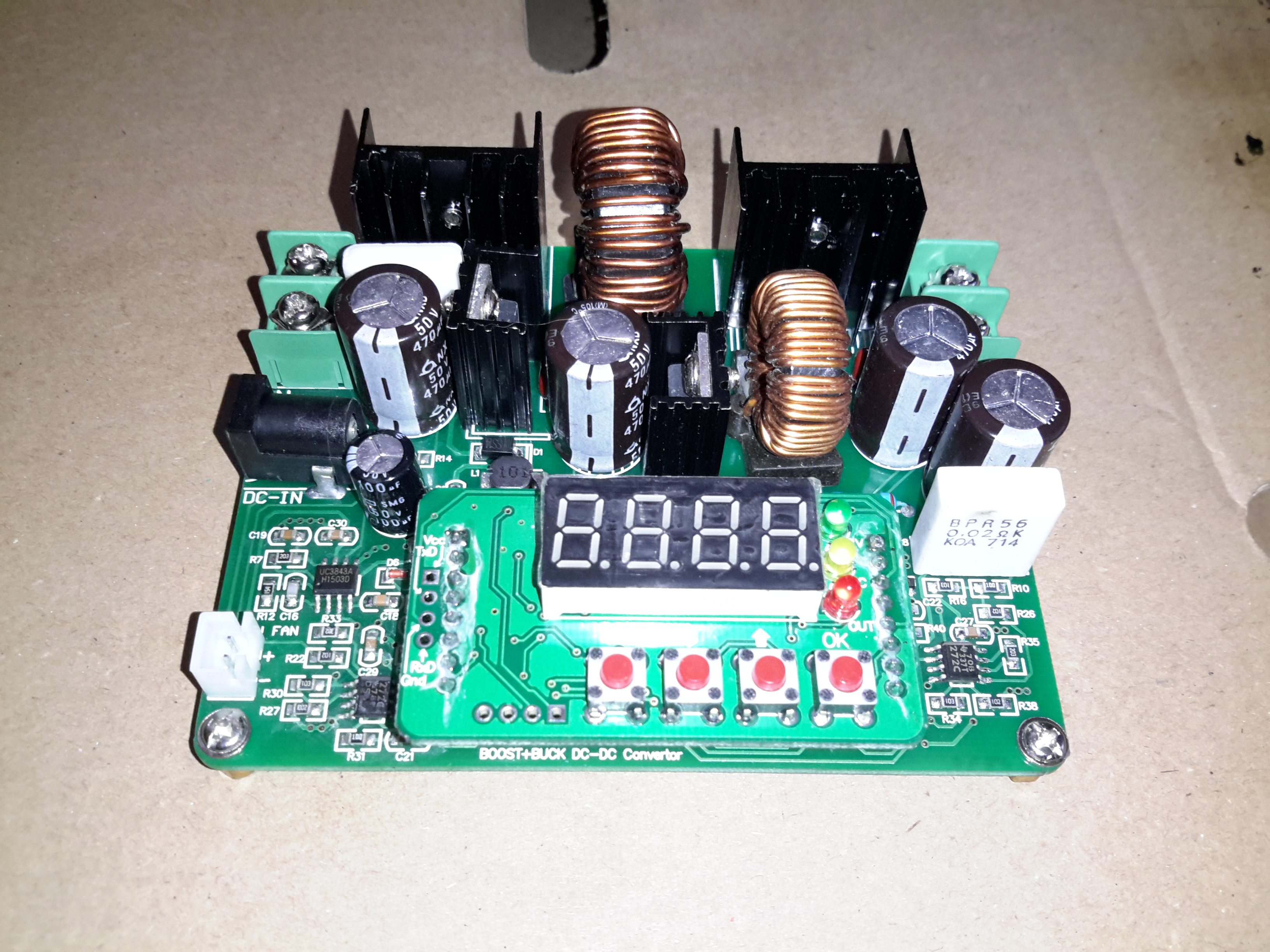

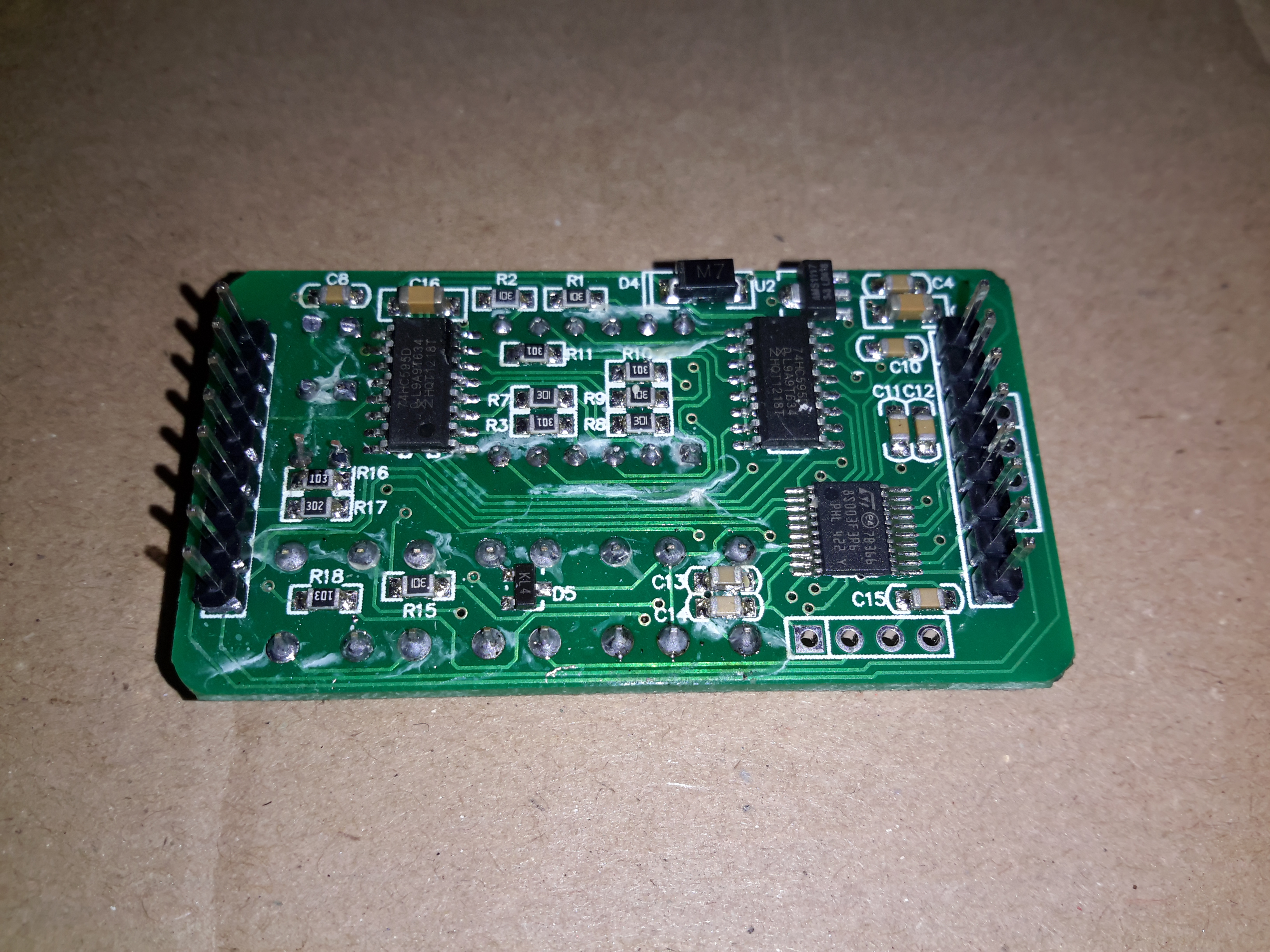
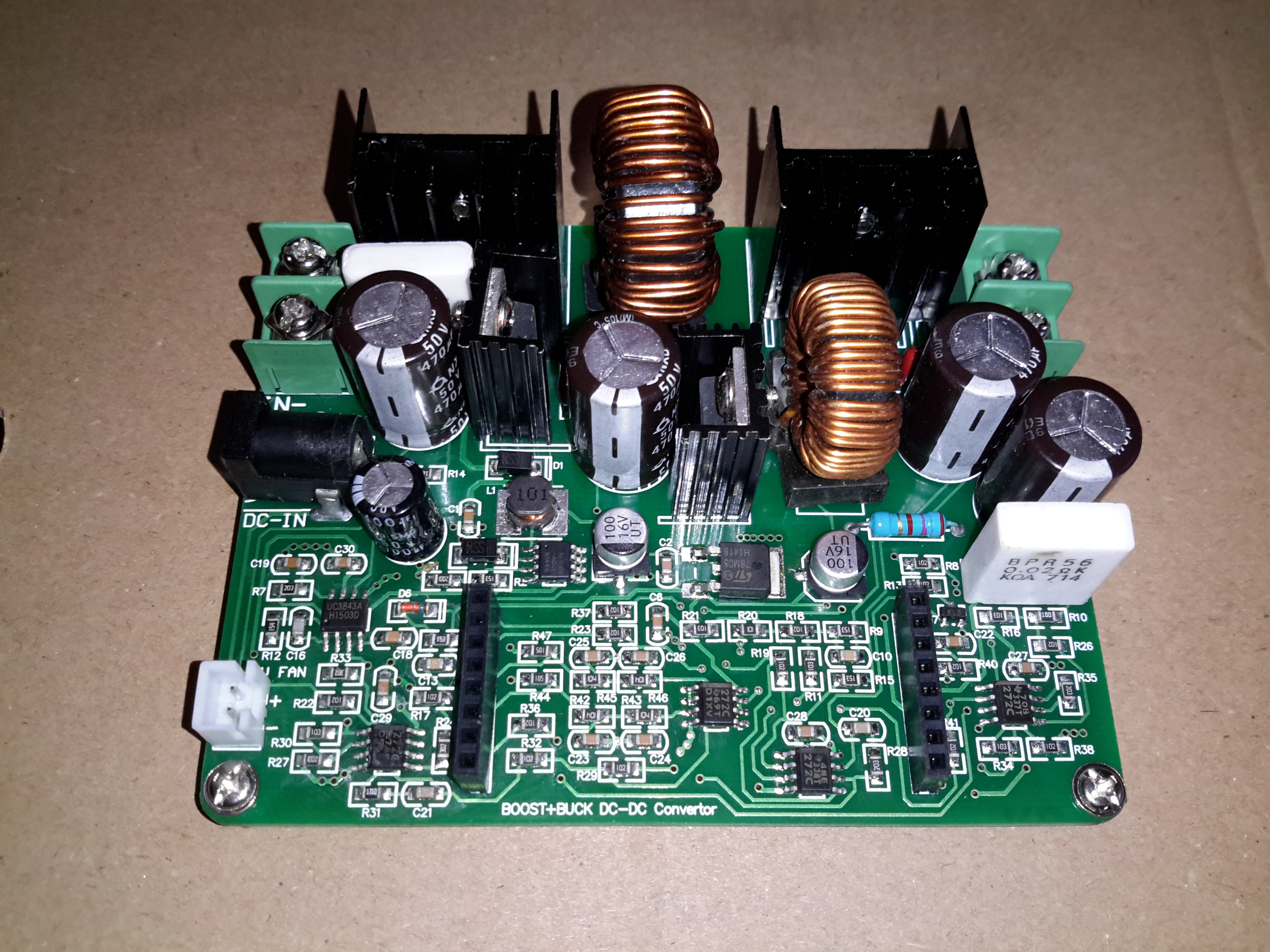





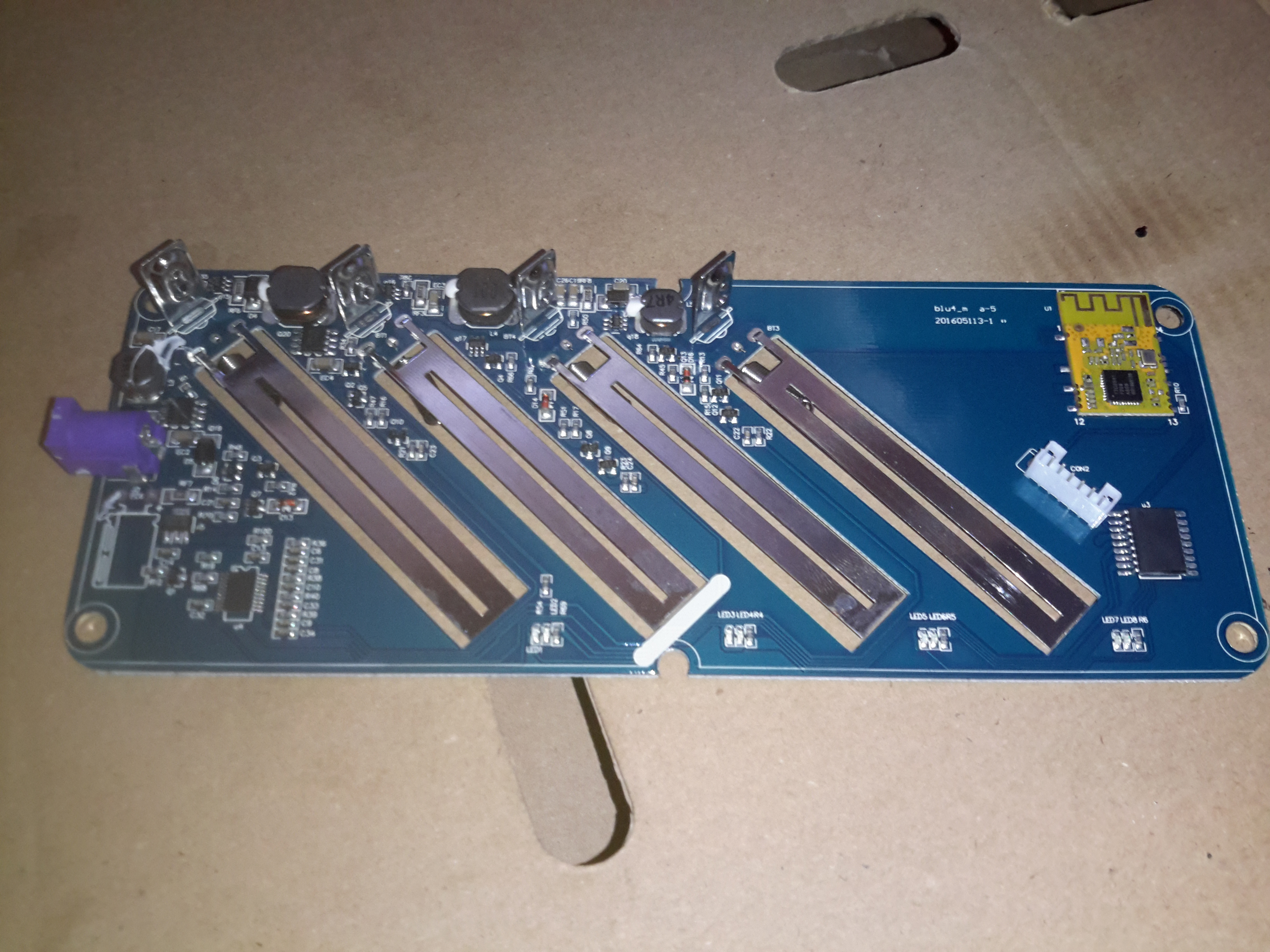
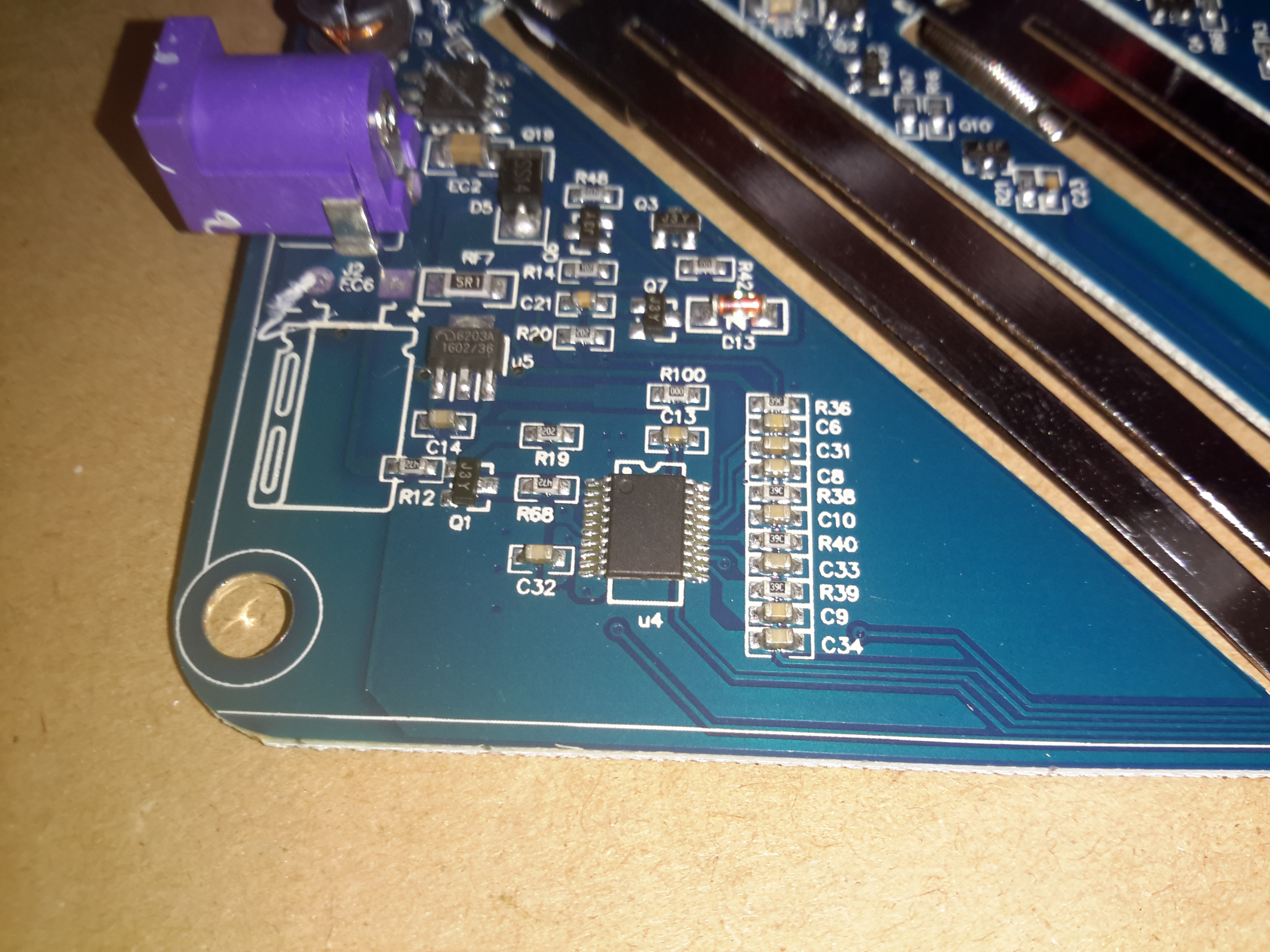

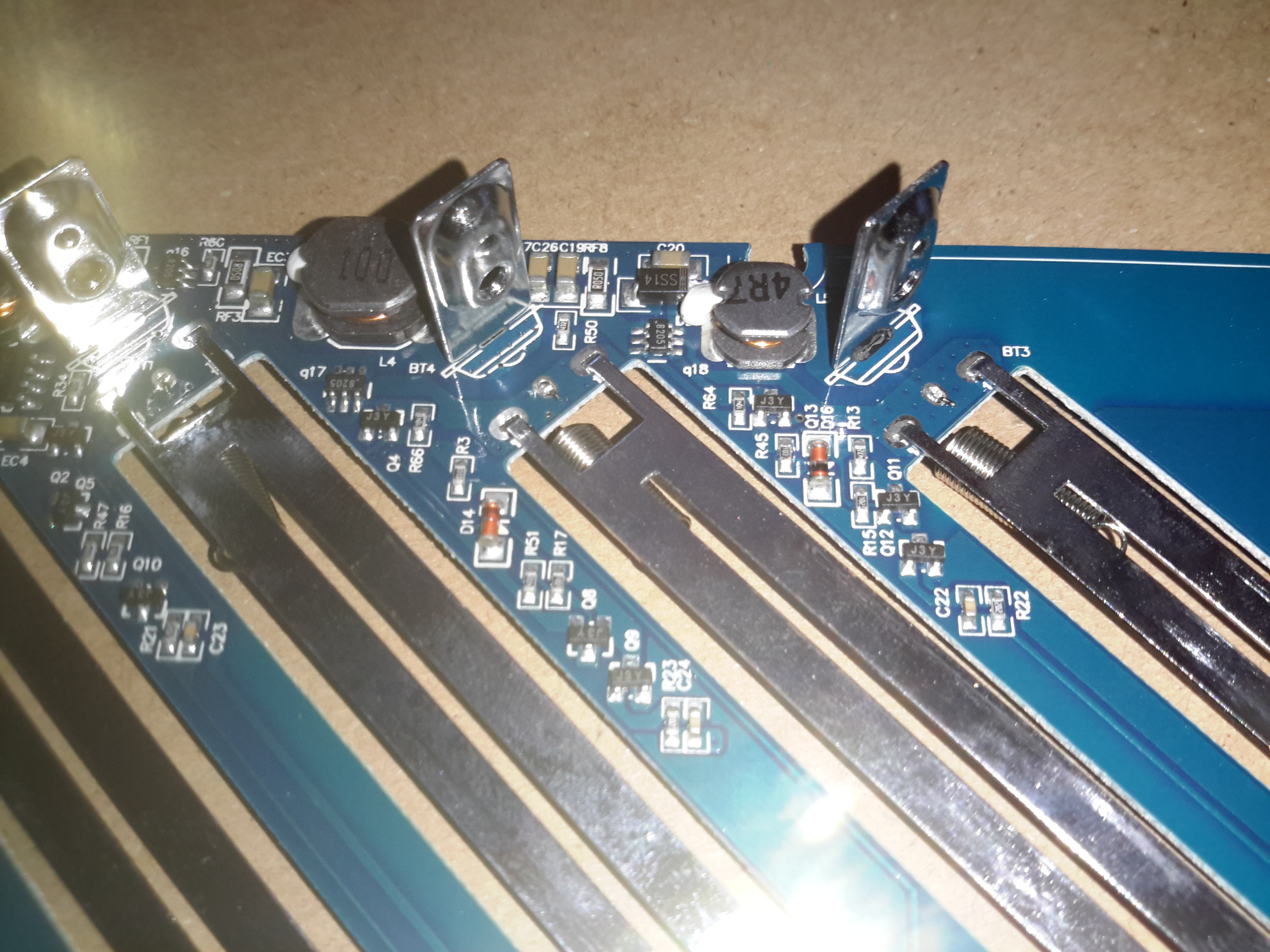

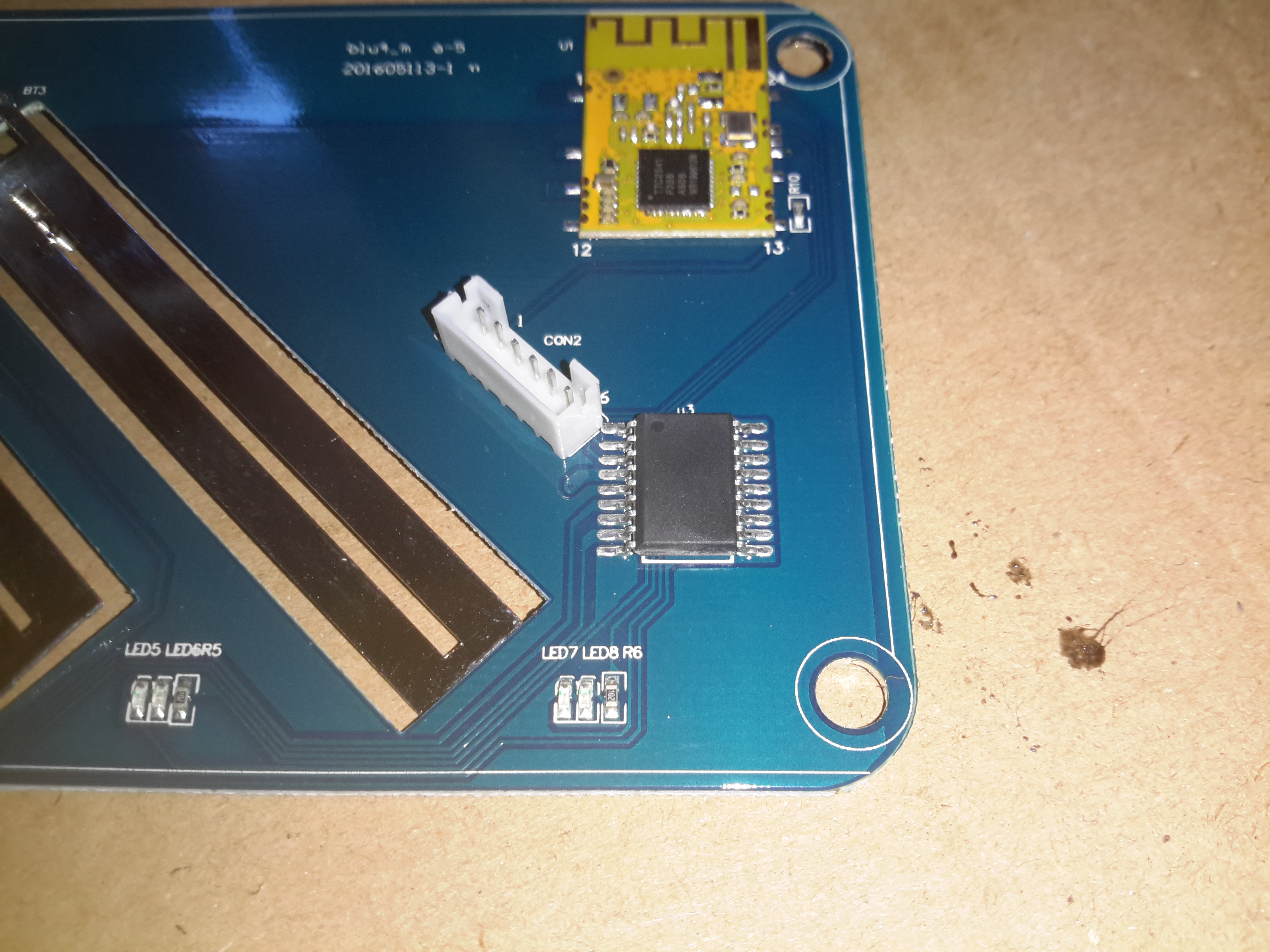



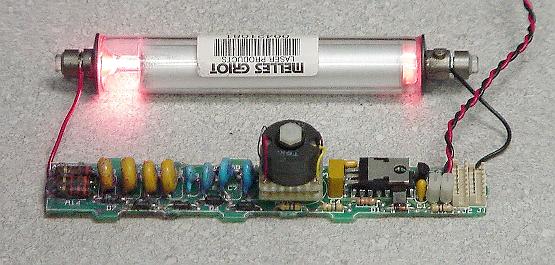
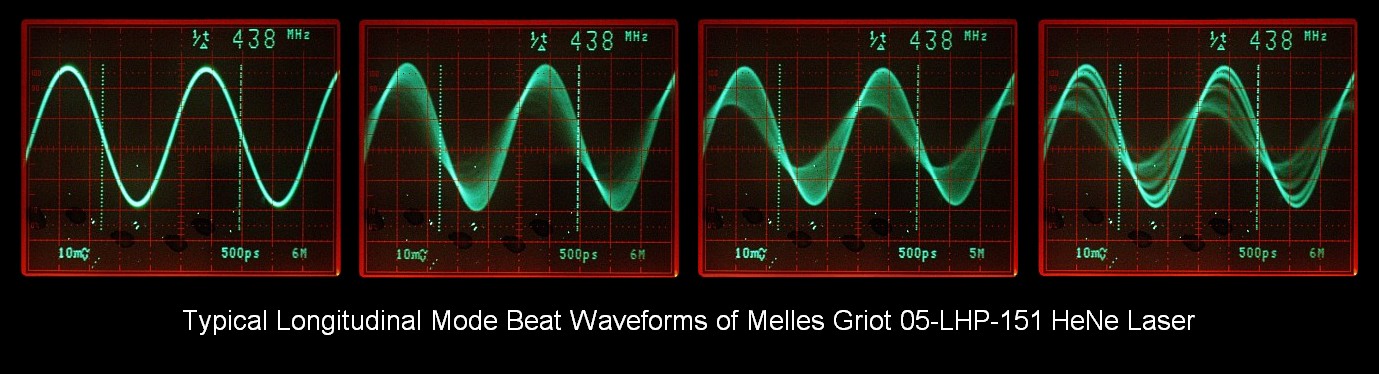
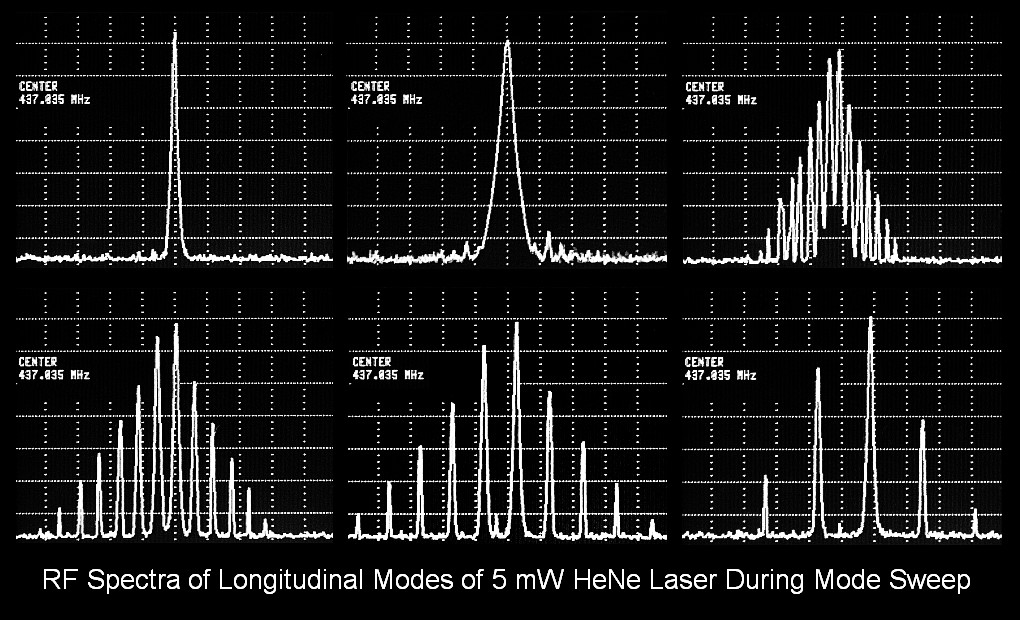
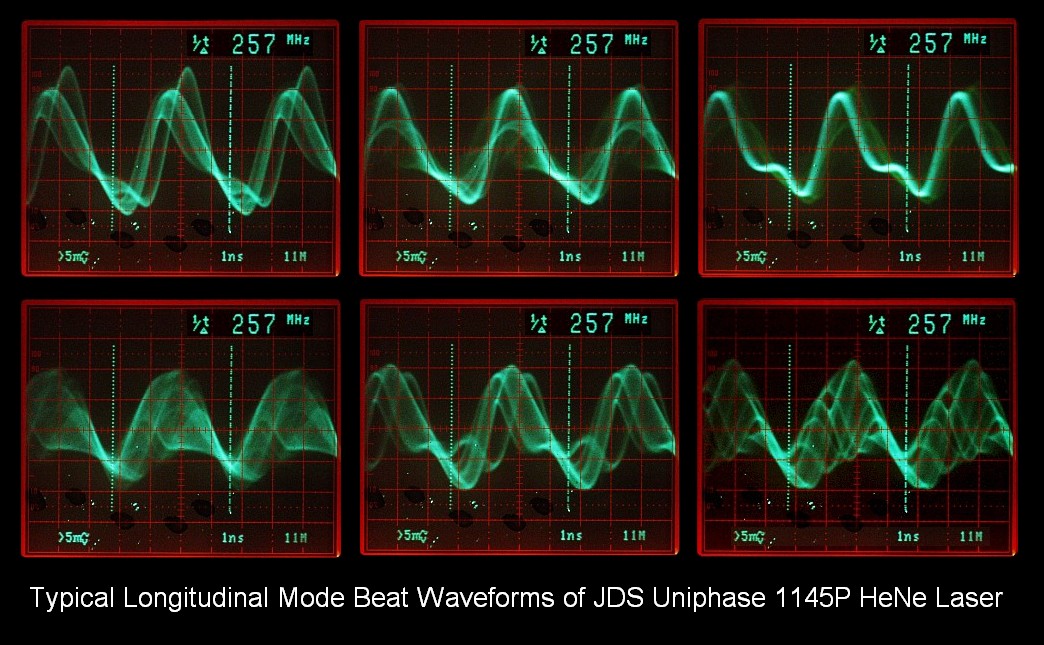
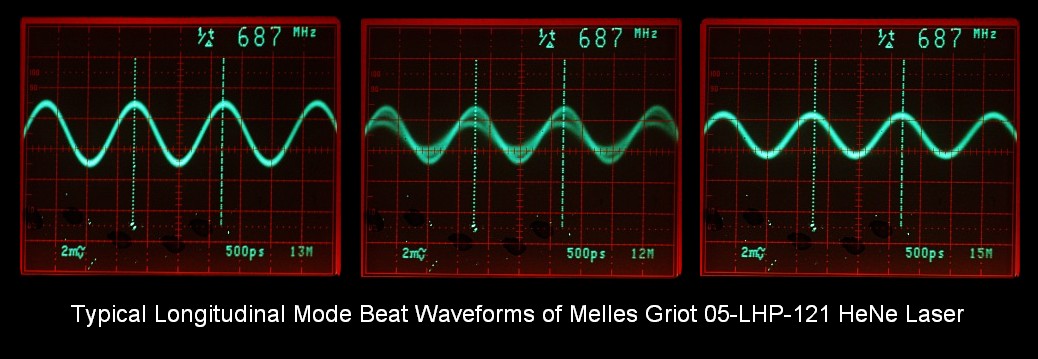
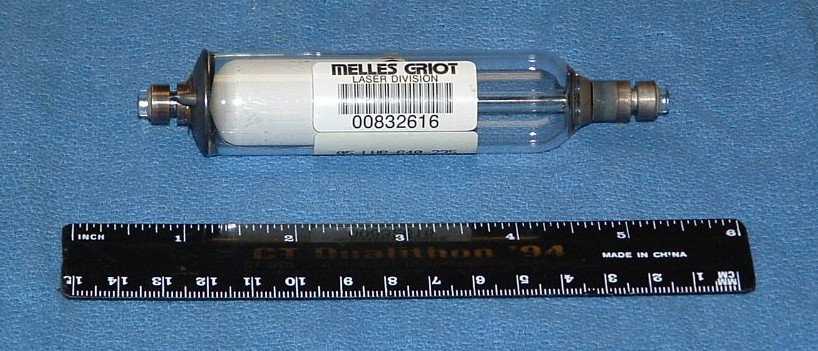
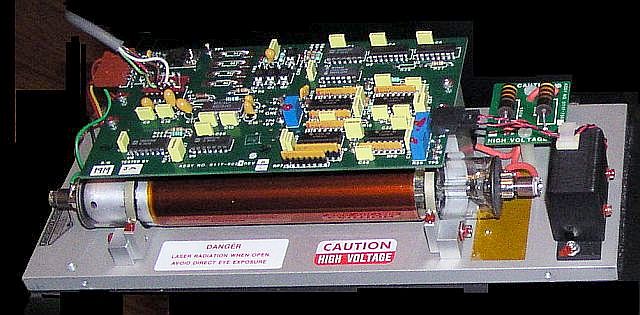

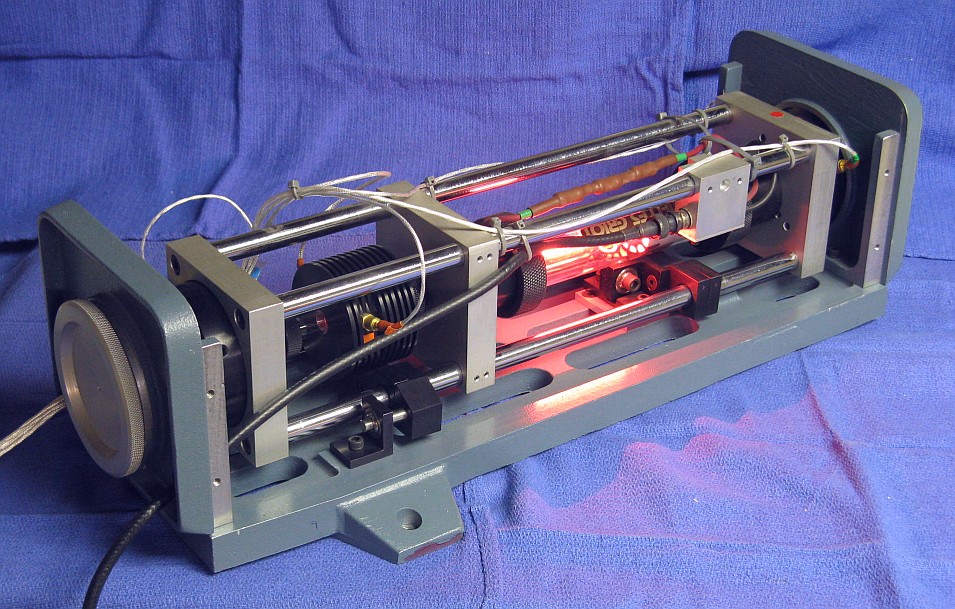
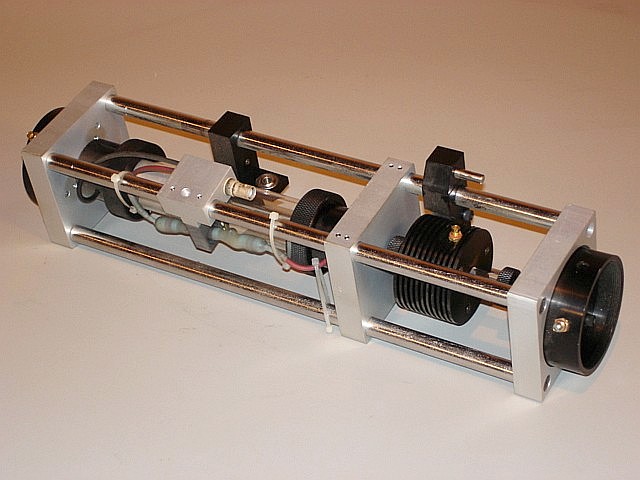
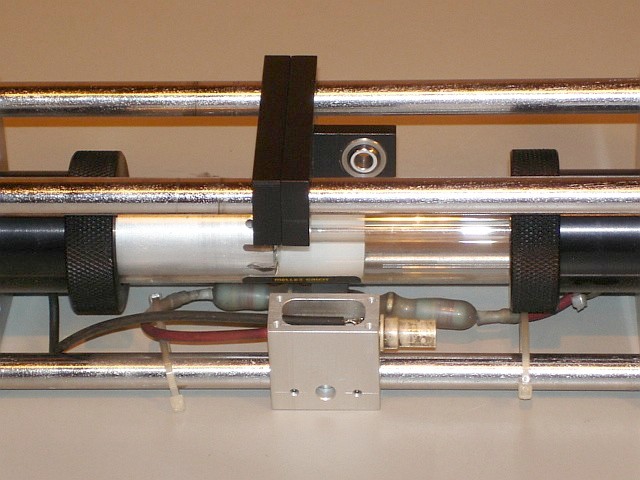
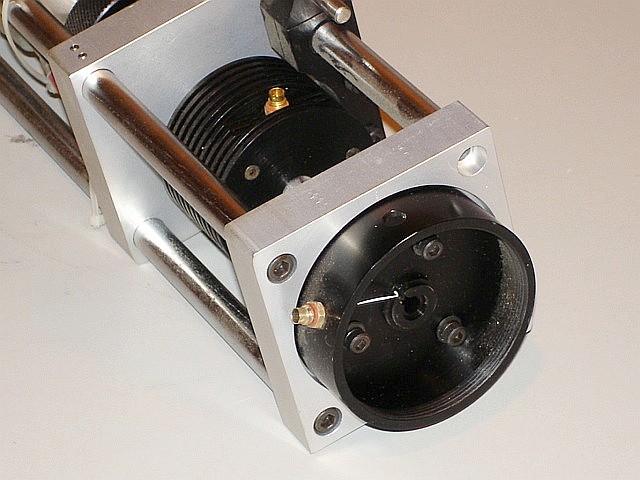



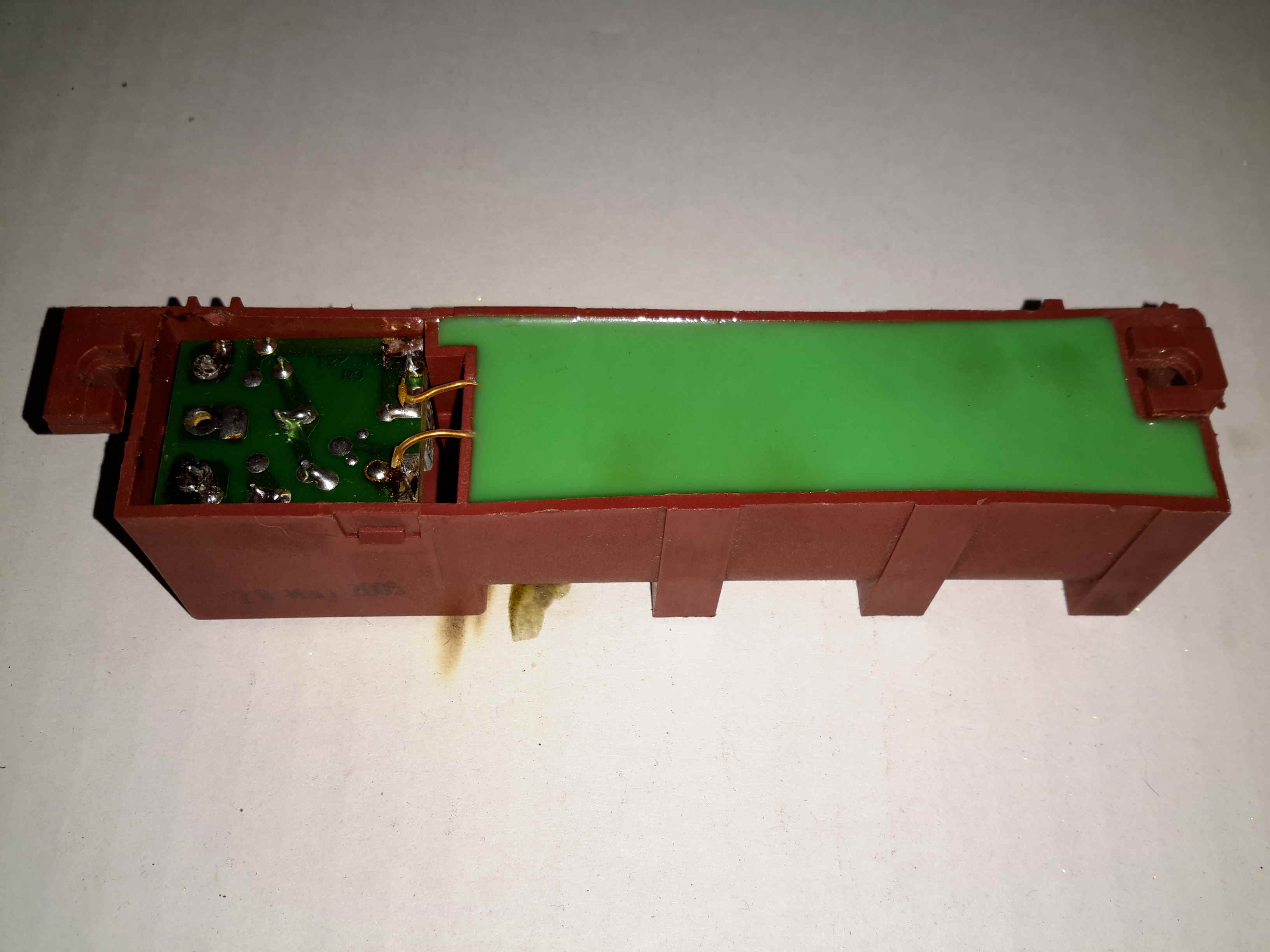











{kind=link}
{kind=link}
{kind=link}